|
|

|
|
Prime fasi di realizzazione del telaio di adriBOT, realizzazione delle traverse e dei supporti dei servomotori |
|

|
|
Ecco i due supporti laterali per il fissaggio dei servomotori pronti per il montaggio |
|
|
|

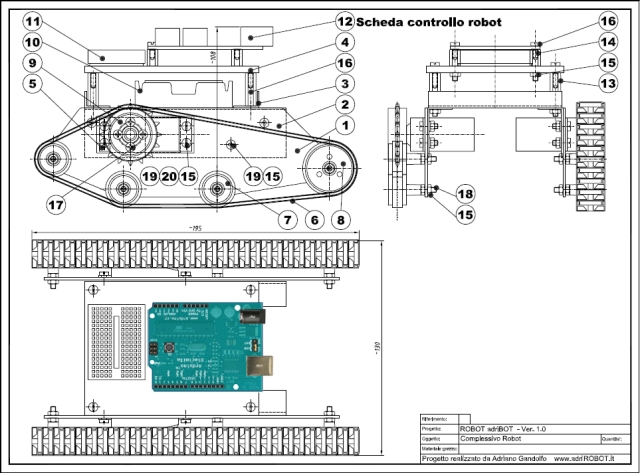
|
|
Oltre al telaio laterale sono necessari un servo modificato per rotazione continua, n°4 viti M3x10,n°4 dadi M3, n°4 rondelle ø3,2 |
|

|
|
Ecco il servomotore montato sul telaio laterale |
|
|
|

|
|
Ora occorre fissare al telaio laterale completo di servomotore la piastra di alluminio laterale utilizzando n°3 M3 L=10 con dadi M3. |
|

|
|
Ecco la piastra laterale completa |
|
|
|

|
|
Si passa ora al fissaggio delle rute folli necessarie per la guida del cingolo per ogni lato del robot sono necessarie n°1 ruota grande, n°3 medie, n°4 viti M3x25 complete di dadi M3 e rondelle antisvitamento. |
|

|
|
Prima fase di montaggio delle ruote |
|
|
|

|
|
Dettaglio costruttivo del fissaggio delle ruote al telaio, la ruota arancione deve essere libera di ruotare con il minimo di gioco. |
|
|
|
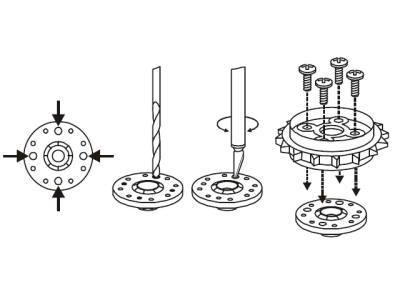
Disegno schematico delle fasi di preparazione della ruota motrice da collegare al servomotore. Occorre prima di tutto allargare quattro fori presenti sulla squadretta, i fori dovranno essere più piccoli della vite in modo che, quando saranno inserite le viti queste possano fare presa. È possibile eseguire questi fori con una punta di trapano, oppure utilizzando la lama di per ingrandire i fori come mostrato nella figura.
Se si utilizza il cutter, assicurarsi di non ingrandire eccessivamente i fori, magari mediante l’alesatura con il coltello sia sul lato superiore che inferiore, in questo modo il foro sarà più omogeneo |
|
|
|

|
|
Ecco le due squadrette pronte per il fissaggio |
|

|
|
Per la realizzazione di ognuna delle due ruote motrici sono necessari n°1 ruota grande dentata, n°1 ruota per servo preventivamente forata, n° 4 viti autofilettanti |
|
|
|

|
|
Ecco le ruote motrici montate |
|

|
|
Si passa poi al fissaggio della ruota motrice sul perno del servomotore, si utilizza la vite originale del servo, si dovrà applicare una leggera forza per permettere alla ruota di entrare sul perno zigrinato del servomotore |
|
|
|
|
|
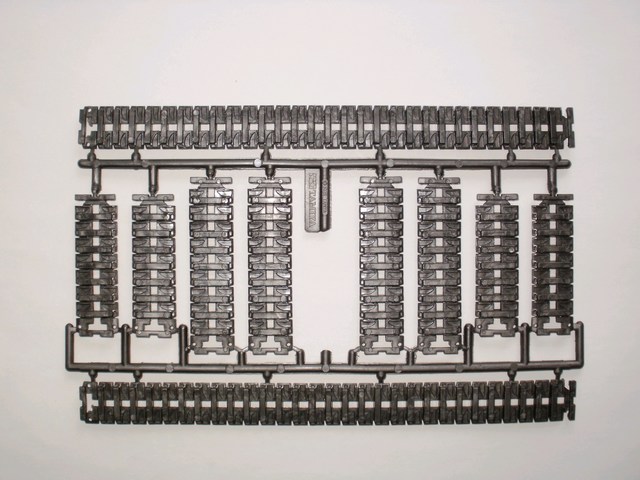
Occorre poi staccare la gruppo completo i particolari necessari alla realizzazione dei cingoli |
|

|
|
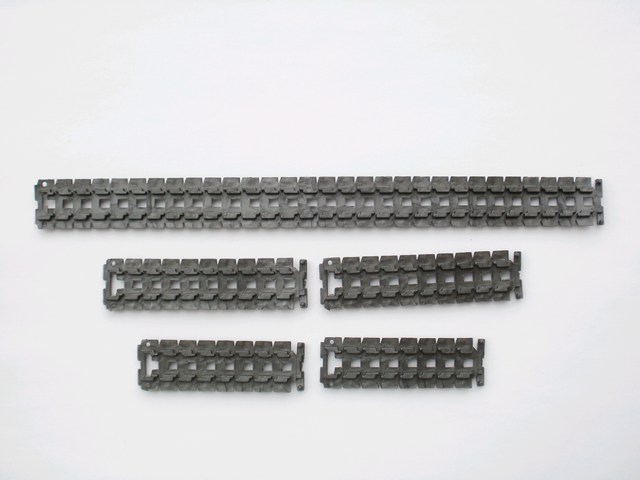
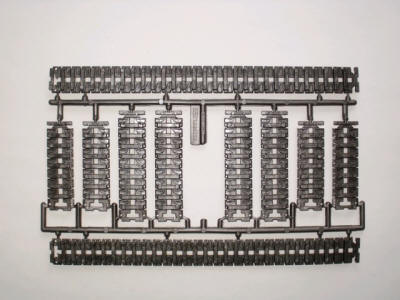
Per ogni singolo cingolo lungo 66 maglie sono necessari: n°1 pezzo da 30 magle n°1 pezzo da 10 maglie n° 1 pezzo da 8 magle. |
|
|
|

|
|
Ecco il primo dei cingoli montati. |
|

|
|
Anche il secondo cingolo è assemblato. |
|
|
|

|
|
A questo punto i due cingoli potranno essere installati sulle rispettive ruote, esercitando una leggera trazione sul cingolo stesso. Controllare che ogni ruota ruoti senza sforzo e senza incepparsi. Se dovessero bloccarsi di dovrà allentare il dado e rimontare per mantenere il piccolo spazio come indicato precedentemente. |
|
|
|
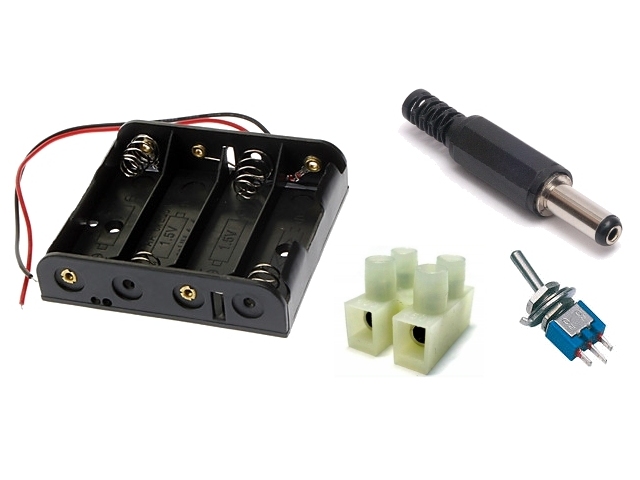
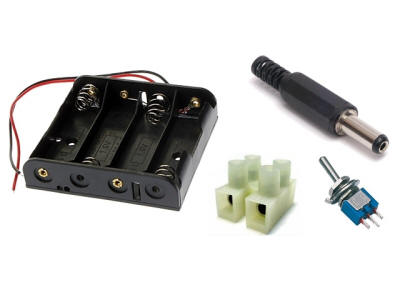
Materiale per il cablaggio elettrico, portabatteria, interruttore a levetta, morsettiera a mammut, connettore polarizzato che andrà poi inserito nella presa DC di Arduino. |
|
|
|
|
|
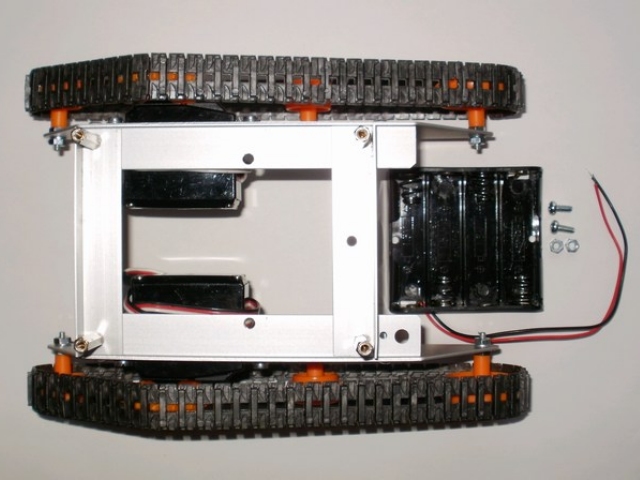
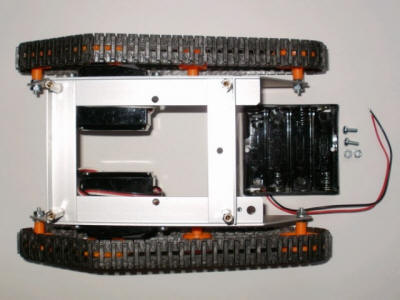
Si uniranno ora i due telai tramite le traverse fissando il tutto mediante i 4 distanziali esagonale L= 20 utilizzando 4 dati M3. Si passa quindi al montaggio del porta batterie. |
|
|
|
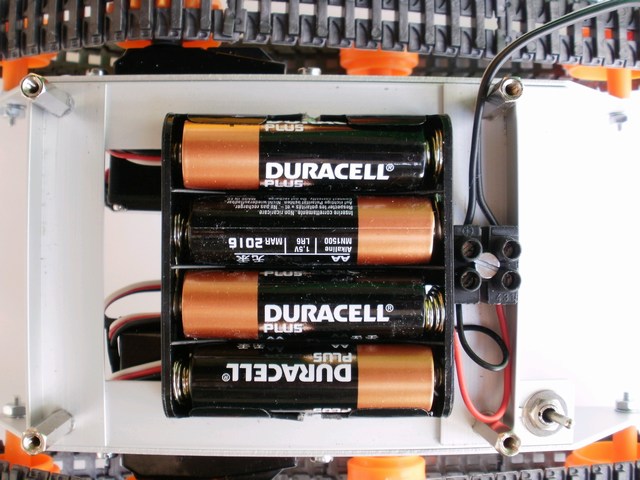
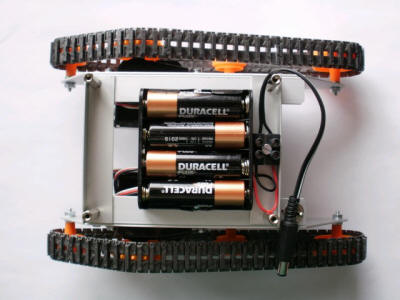
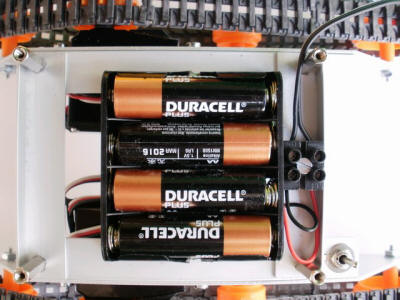
Porta batterie montato e batterie inserite |
|
|
|
|
|
Dettaglio morsettiera per collegamento porta batteria. |
|
|
|
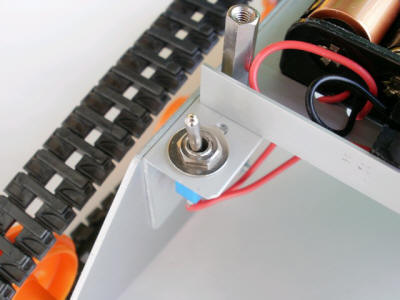
Dettaglio interruttore di accensione. |
|
|
|
|
|
Dettaglio porta batterie. |
|

|
|
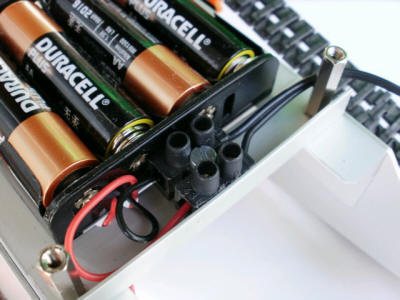
Dettaglio modifica porta batteria per il suo fissaggio. |
|
|
|
|
|
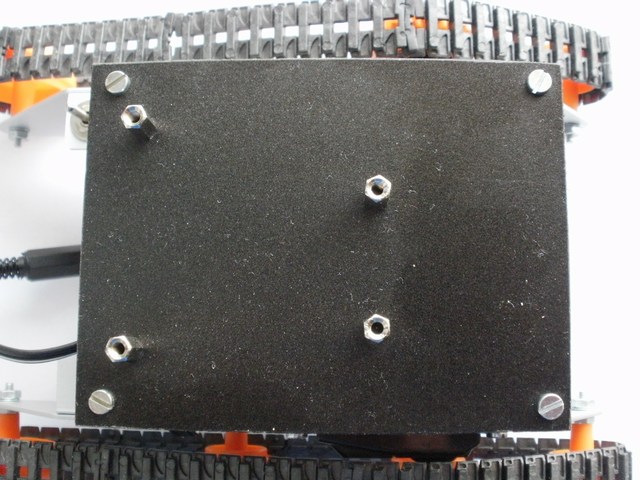
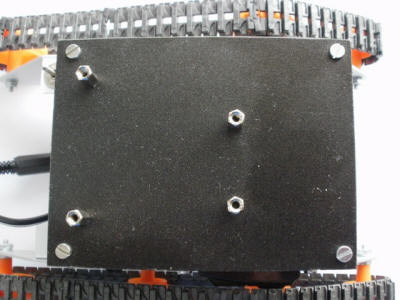
Si monterà ora la piastra supporto scheda con n° 4 viti M3x8 su cui si fisseranno 4 distanziali esagonali L=10 mm fissati con 4 dadi M3. |
|

|
|
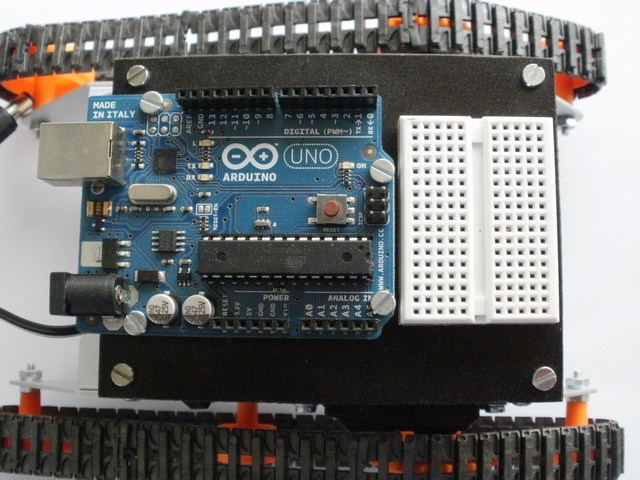
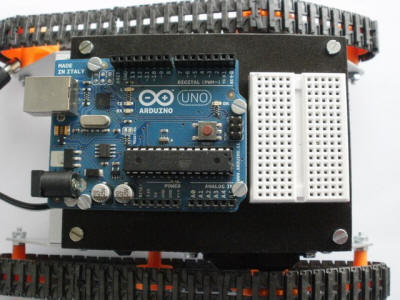
Installazione della scheda Arduino UNO fissata con n° 4 viti M3x8. |
|
|
|
|
|
La mini breadbord si fisserà alla piastra mediante la sua base autoadesiva. |
|
|
|
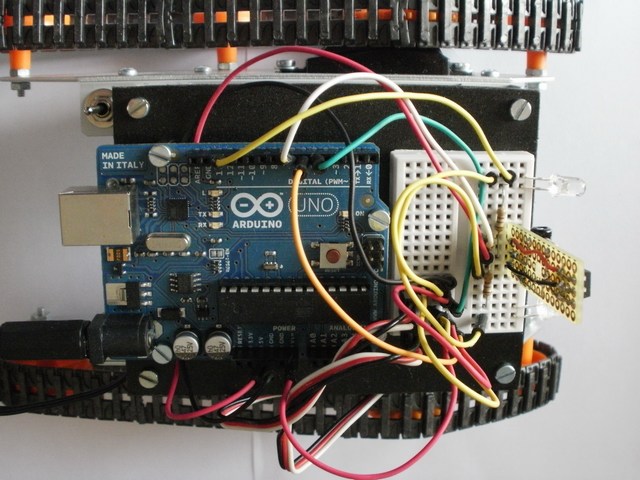
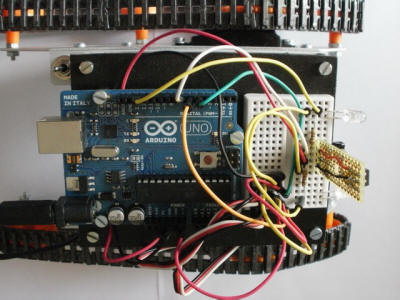
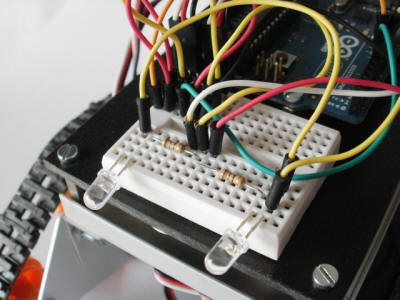
Si passerà quindi al cablaggio seguendo lo schema riportato nella pagina schema. |
|
|
|
|
|
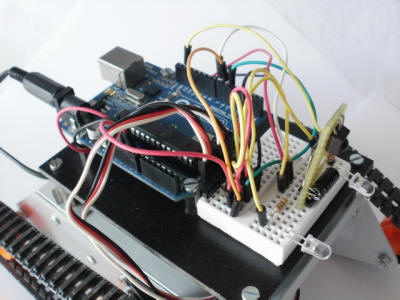
Altra vista del cablaggio |
|
|
|
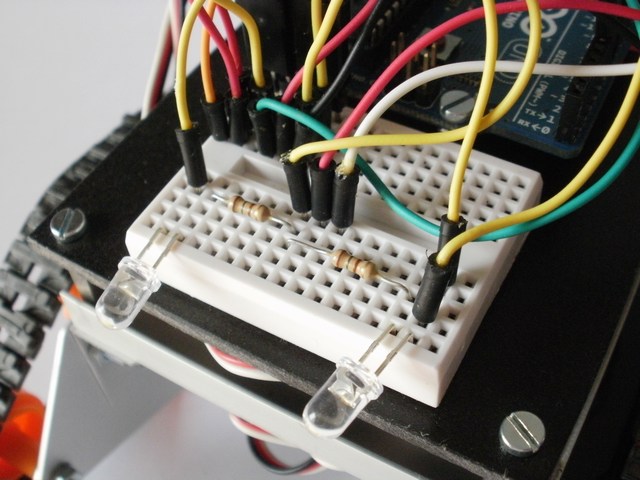
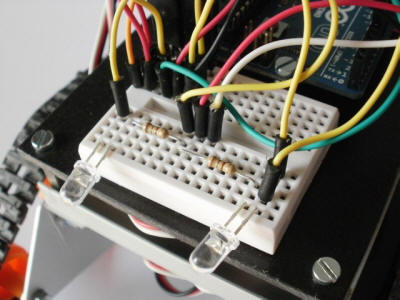
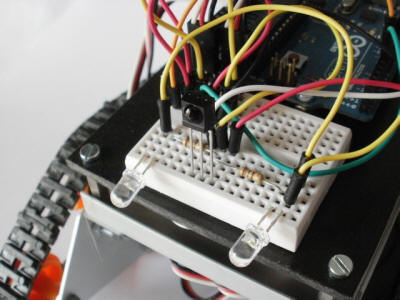
Dettaglio della zona di montaggio del senore IR |
|
|
|
|
|
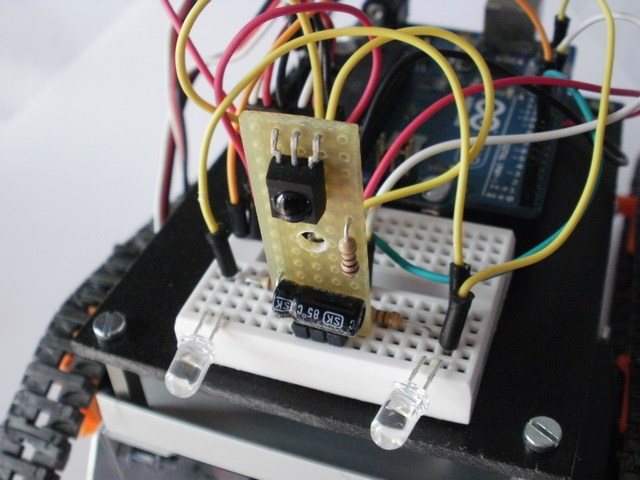
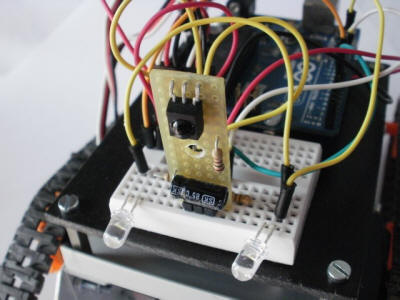
Modulo sensore IR montato |
|
|
|
Dettaglio del cablaggio nel caso si volesse intallare il solo sensore IR che ha una diversa piedinatura |
|
|
|
|
|
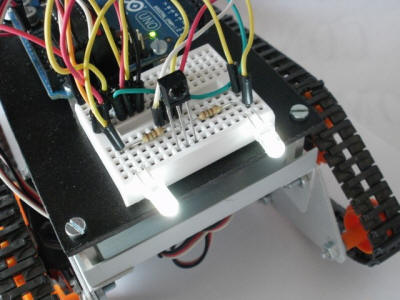
Singolo sensore montato |
|
|
|
Dettaglio dei led accesi |
|
|