ultimo aggiornamento 19 giugno 2021
|
ultimo aggiornamento 19 giugno 2021 |
|
|
|
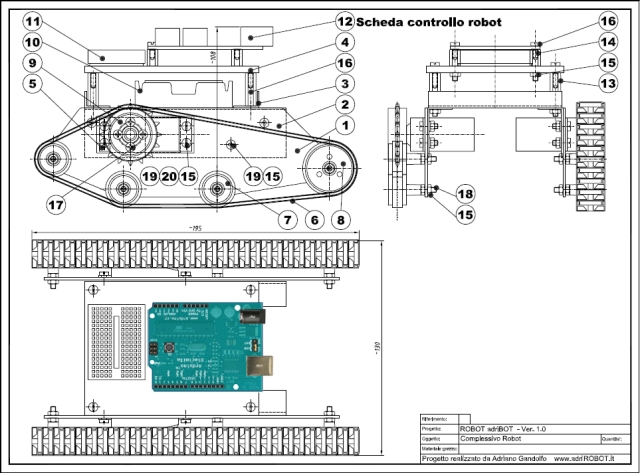
Il robot qui descritto si
basa sul Boe-Bot Tank Treads (articolo #28106)
prodotto dalla Parallax, a cui ho apportato alcune modifiche ed integrazioni.
La versione originale prevede che la parte centrale del robot sia formato dal
telaio del Boe-Bot e la scheda di comando sia la
Boe-Bot.
Nel robot adriBOT
è stato invece autocostruito parte del telaio e utilizzato
come scheda a
Super
Carrier equipaggiato con il
processore BS2,
oppure in alternativa la
scheda
Arduino UNO.
Queste sono solo alcune delle caratteristiche del robot proposto::
| Processore scheda di comando | Arduino UNO - ATmega328 /Super Carrier Basic Stamp2 |
| Uscite | Comando servomotori Comando led illuminazione |
| Sensori | Sensore decodificatore segnali IR tipo TSOP 1836 (36 KHz)- o in alternativa Modulo KY-022 IR sensor |
| Alimentazione | 6V tramite 4 batterie 1,5V tipo AA |
| Motorizzazione | 2 servomotori a rotazione continua |
| Cingoli | In gomma prodotti dalla Tamiya |
| Misure | 195x 130x108 mm |
| Peso | 465 g |
Altre pagine relative al robot
Componenti:

Articolo pubblicato sul Blog Elettronica Open Source il 26 agosto 2014

Ormai sono molti i sistemi
per controllare un dispositivo a distanza senza fili, per esempio i
moderni telefoni si connettono con la rete con il sistema WI-FI oppure
tramite Bluetooth.
Esiste, però, un modo ancora più economico ed è quello tramite raggi
infrarossi.
Quasi tutte le apparecchiature audio e video sono controllate in questo
modo, per cui i componenti necessari sono abbastanza a buon mercato, ed
il sistema è ideale per l'utilizzo nel campo della robotica o
dell’automazione.
In quest’articolo analizzeremo come funziona un sistema di controllo a
infrarossi, costruiremo un semplice
robot
cingolato e comanderemo l’azionamento dei servomotori di
movimento tramite una scheda Arduino, utilizzando un sensore infrarosso
e un telecomando.


Versione originale del robot

adriBOT con Super Carrier Basic Stamp2

adriBOT con Arduino UNO


 |
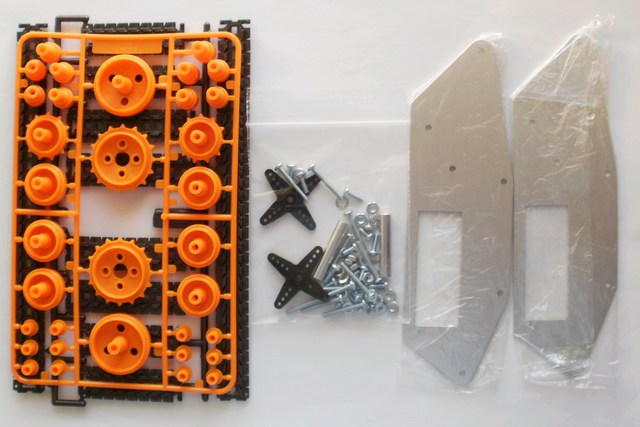 |
| Confezione del kit codice #28106 | Contenuto della confezione |
|
Istruzioni di montaggio originali in inglese |
Istruzione per l'utilizzo del robot con accelerometro (in inglese) |
|
| Elenco revisioni | |
| 19/06/2021 | Aggiornato pagina |
| 31/08/2014 | Aggiornato pagina, inserito link all'articolo rivista. |
| 27/07/2014 | Aggiornato pagina |
| 25/01/2010 | Aggiornato pagina |
| 07/01/2010 | Emissione preliminare |

