ultimo aggiornamento 16 marzo 2012
|
ultimo aggiornamento 16 marzo 2012 |
|
|
|
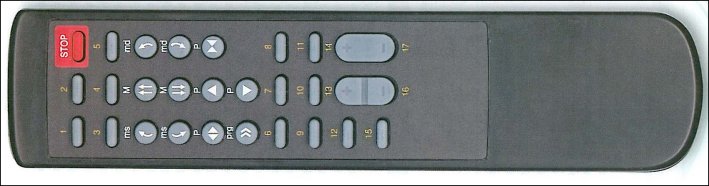
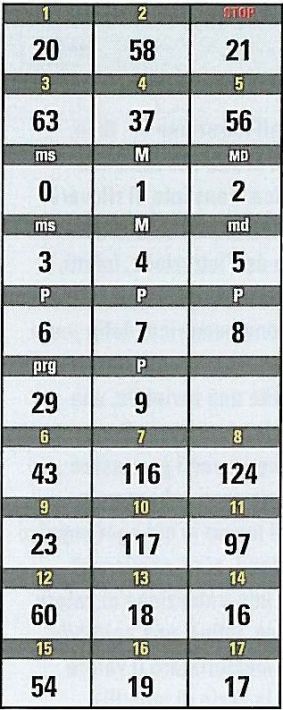
Il telecomando per il telecomando del
robot
Panettone è allegato al
fascicolo
n° 19.
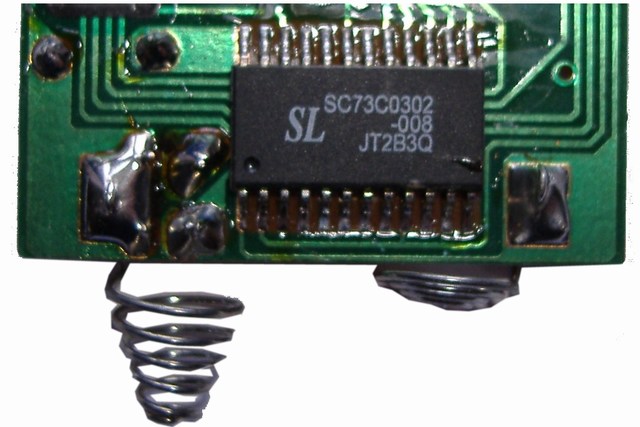
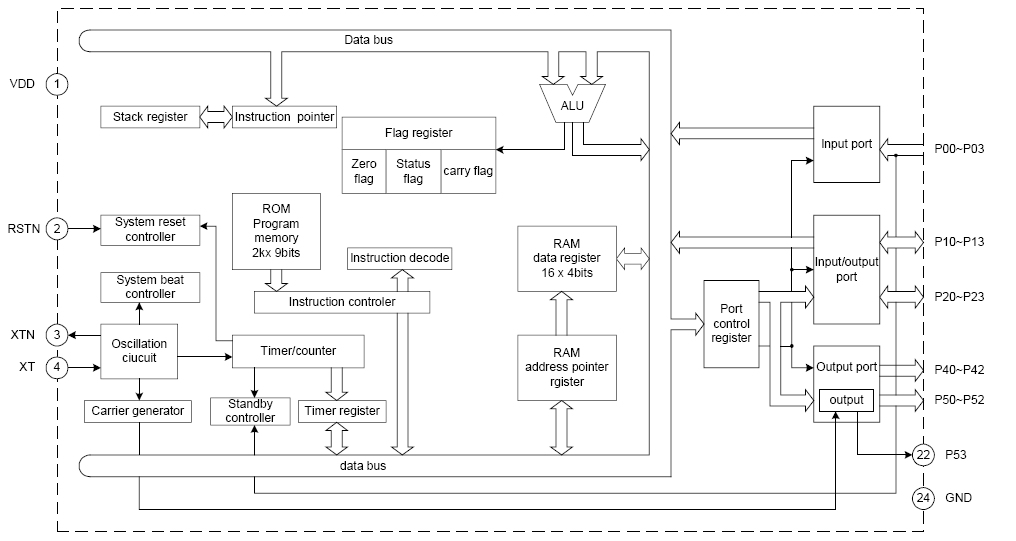
Cuore del circuito di comando è l'integrato SC73C0302-008 di
produzione cinese che codifica i segnali della tastiera e li invia
tramite un led trasmittente ad infrarosso.
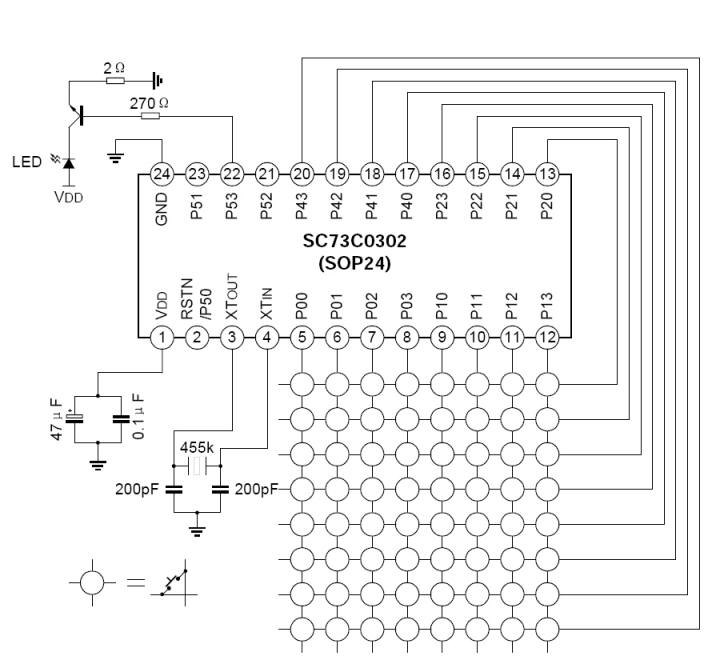
L'alimentazione è fornita tramite 2 batterie 1,5V stilo. |
|
||||||||

Particolari del telecomando DeA
|
|
|
|
|
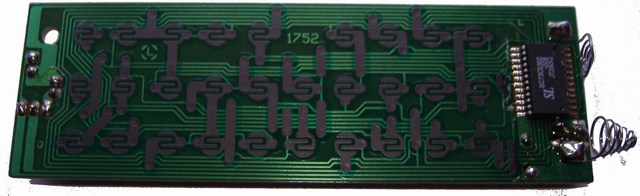
Vista del circuito stampato
| μPD17225GT 4-bit single-chip microcontroller for infrared remote control transmitter | ||
 |
 |
 |
| Piedinatura | Datasheet | Foto dell'integrato |
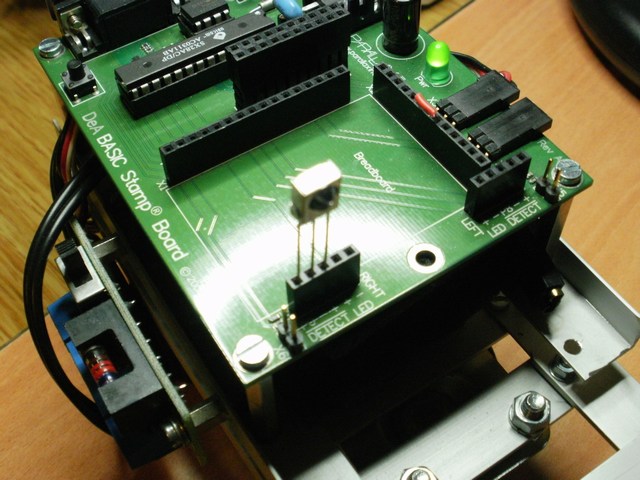
| Ricevitore e decodificatore infrarossi TK1838 | ||
 1-OUT 2-GND 3-Vcc |
|
|
| Piedinatura | Datasheet | Foto del sensore |
Schema a blocchi del processore del telecomando
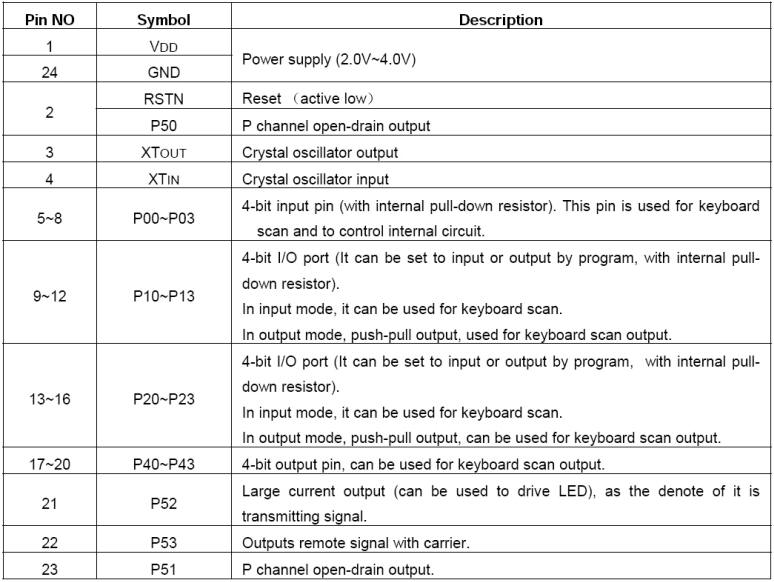
Funzione di pin dell'integrato
Schema di principio del telecomando
|
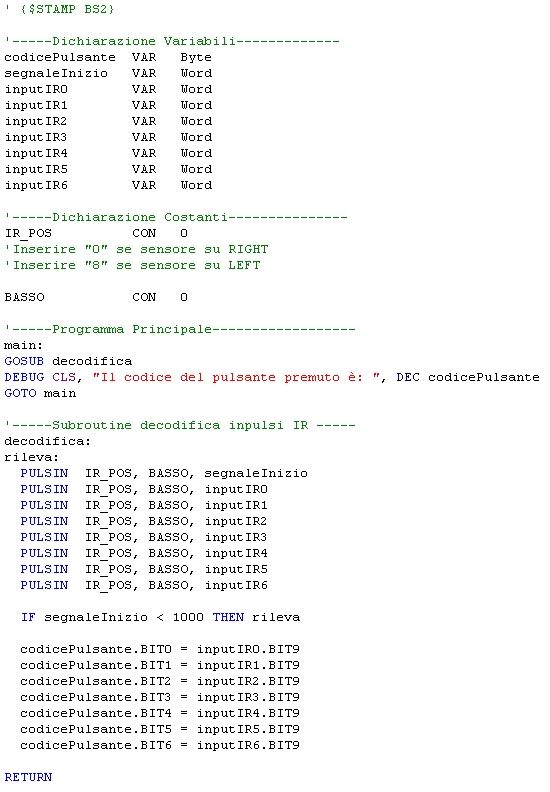
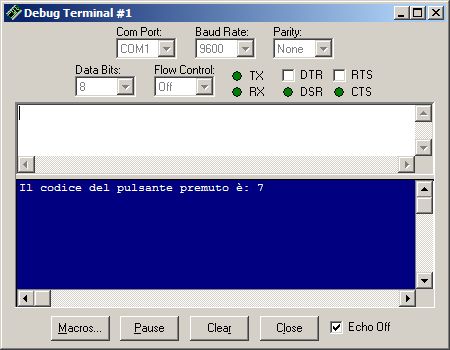
Comandiamo il robot con il
telecomando Istruzioni per l’utilizzo del
telecomando del robot e del relativo programma bs2.
Segnaliamo inoltre che il programma prevede,
oltre all’uso del telecomando, l’impiego opzionale dei baffi per rilevare
ostacoli.
Ricordiamo che le azioni compiute dal robot, in risposta ai segnali inviati dal telecomando, sono definite attraverso la programmazione in PBASIC e sono quindi liberamente modificabili. In seguito saranno resi disponibili altri programmi per sfruttare altri tasti del telecomando e far eseguire nuovi compiti al robot. |
|
|
|
|
D: Il telecomando non va, anche dopo aver caricato il
programma nel Robot.
R: Controllare che: 1 - le pile nel telecomando siano inserite bene. 2 - Che sia stato montato solo il ricevitore sul lato della scheda madre dove è scritto LEFT. 3 - Che siano rimossi i LED infrarossi di Trasmissione (azzurri). Se il problema persiste allora si può provare a sostituire il transistor ricevitore del lato LEFT con l'altro, inutilizzato, ricordando che va montato nello stesso posto ed allo stesso modo. Per provare il funzionamento del telcomando si può mettere il Robot sugli appoggi di plastica, collegare il cavo seriale che si usa per programmarlo, ricaricare il programma e far partire; nella finestra di DEBUG compaiono dei messaggi ogni volta che si preme un tasto ed il Robot riceve il segnale corrispondente.
D: Il telecomando, anche con il software che ho scaricato dal sito web, non
funziona!
D: Ci sono alcuni tasti del Robot che non hanno effetto; come mai?
D: La scheda controllo motori va bene anche per motori a 12 Volt? Come posso
fare per pilotare motori a questa tensione?
D: Con il telecomando si può fermare il robot facendolo poi ripartire senza
premere il pulsante "reset" (es. se con il braccio robotico devo tirare su
un oggetto e non riesco a farlo con il robot in corsa)?
D: Come posso aggiungere una funzione al programma per il telecomando?
D: Quanti tasti del telecomando può gestire contemporaneamente un programma? |
| Elenco revisioni: | |
| 16/03/2012 | Aggiornato pagina |
| 10/10/2008 | Inserito programma di gestione del robot con telecomando |
| 14/03/2008 | Inserito istruzioni programma di gestione |
| 14/03/2007 | Aggiornato pagina, inserito FAQ |
| 16/11/2005 | Emissione preliminare |