Scheda madre
ultimo aggiornamento 2 novembre 2009
|
Scheda madre ultimo aggiornamento 2 novembre 2009 |
|
|
|
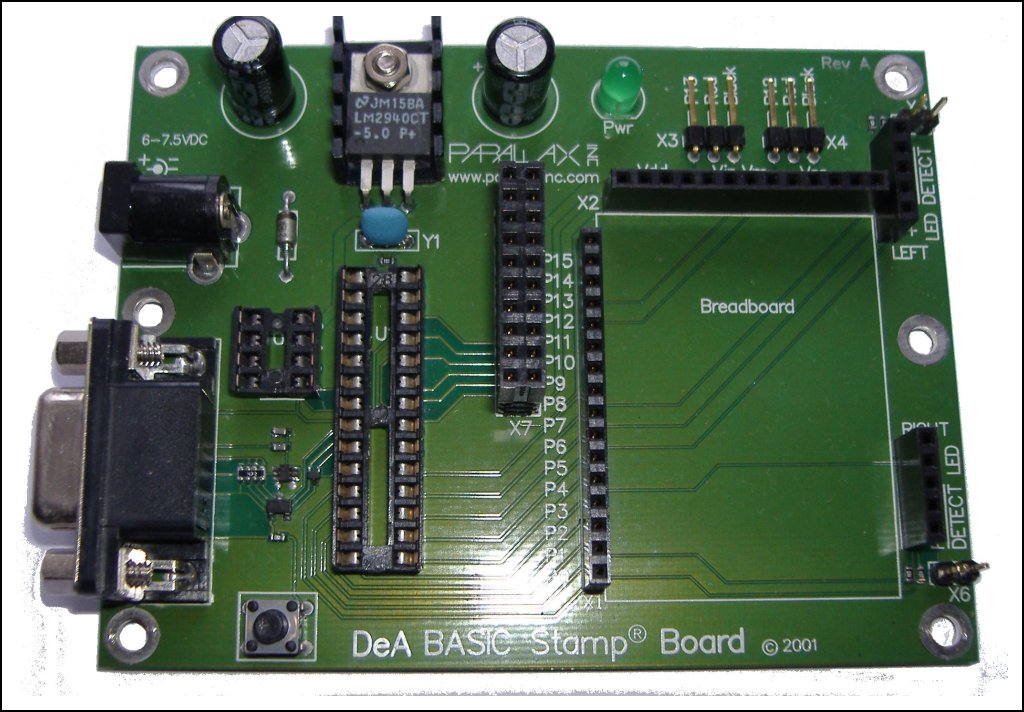
Nel robot la scheda madre DeA BASIC
Stamp® Board svolge un ruolo fondamentale.
I vari componenti sono allegati ai fascicoli n° 11-12-13-21
Su questa scheda sono raccolti gli elementi che costituiscono Il
"cervello elettronico" dei robot. In particolare il chip della memoria, che immagazzina i programmi PBASIC, e il microcontrollore BS/2, che permette al robot dì elaborare le informazioni ed eseguire i programmi presenti in memoria.
La scheda madre inoltre, è predisposta per ospitare i sensori (a infrarossi e di contatto), che consentono al robot di interagire con l'ambiente circostante, e la breadboard, una piattaforma di
sperimentazione che offre la possibilità di realizzare piccoli circuiti per lo svolgimento di svariati esperimenti di elettronica.
Vedremo poi come, combinando la scheda madre con la scheda di controllo motori, si possano controllare i movimenti dei due motori a spazzola. La DeA BASIC
Stamp® Board rappresenta quindi l'indispensabile base per il funzionamento di tutti gli altri componenti elettronici dei robot, ma anche per lo sviluppo delle sue potenzialità.
Questa scheda potrà essere potenziata utilizzando le istruzioni riportate alla pagina Come potenziare la Scheda BS2 trasformandola in una BS2 SX
 |
 |
 |
|
 |
|
 |
|
 |
 |
 |
 |
||||
| Fascicolo n°11 | Fascicolo n°12 | Fascicolo n°13 | Fascicolo n°21 | ||||
|
|
|
|
||||

|
|
|---|
Il
microcontrollore: il microcontrollore utilizzato in questo robot è un chip
PIC16C57C (di cui è proprietaria l'industria
Microchip), che è il vero e proprio controllore,
sul quale è stato integrato l'interprete del linguaggio
PBASIC (ossia Parallax Basic, un'estensione dei linguaggio BASIC realizzata dalla
Parallax )chip e interprete, insieme, formano il circuito proprietario
BASIC STAMP 2 di Parallax.
L'interprete opera da interfaccia tra il programma PBASIC, memorizzato nella EEPROM, e il microcontrollore.
L'interprete riceve, in ingresso, le istruzioni PBASIC e le traduce in una sequenza di istruzioni elementari da fornire, in uscita, al microcontrollore.
Ogni microcontrollore possiede infatti un insieme di istruzioni elementari, detto
instruction set, con cui è possibile programmarlo. Il linguaggio di tali istruzioni, il cosiddetto linguaggio macchina, tuttavia, e un linguaggio di basso
livello, complesso e poco intuitivo. Programmare il tuo robot fornendo direttamente al microcontrollore le istruzioni elementari, quindi, sarebbe molto difficoltoso. Grazie all'interprete, invece, potrai dialogare con Il microcontrollore In un linguaggio ad alto livello come il BASIC, che utilizza istruzioni più vicine alla logica dei linguaggio umano, in modo da ottenere programmi di più facile comprensione.
Ogni istruzione PBASIC verrà poi tradotta dall'interprete in una sequenza più o meno lunga di istruzioni elementari, comprensibili al microcontrollore.
Si può immaginare che un'istruzione ad alto livello, come "apri la porta", sia tradotta in una sequenza di istruzioni elementari di basso livello, quali 'inserisci la chiave, poi girala, ora abbassa la maniglia e spingi la
porta".
In realtà, il linguaggio PBASIC è un linguaggio ibrido, in quanto Parallax ha apportato al BASIC standard una serie di modifiche che riguardano principalmente una gestione a più basso livello delle porte di 1/0 (corrispondenti ad alcuni dei 28 piedini del microcontrollore), rendendo in questo modo possibile anche una gestione più efficiente di sensori e attuatori. Generalmente all'interno di un microcontrollore si trovano una memoria volatile riservata all'esecuzione dei programmi (RAM, Random Access Memory), un'unità che realizza le operazioni aritmetiche
e logiche sul dati (ALU, Aritmethic Logic Unit) e un clock orologio cioè il sequenziatore che fornisce la scansione temporale per l'esecuzione delle diverse istruzioni e che, di fatto, esprime la velocità di calcolo dei chip. Nel caso dei tuo robot, a seguito della modifica introdotta al microchip, il clock è stato posizionato all'esterno dei microcontrollore e corrisponde, sulla scheda madre, al dispositivo contrassegnato dalla sigla Y1. In particolare il microcontrollore BASIC STAMP
2 allegato ha una velocità di calcolo di 20MHz, in altre parole è in grado di eseguire operazioni matematiche, operazioni di lettura e scrittura della memoria, generazione di segnali dì comando dei dispositivi presenti sul robot alla velocità di
4000 di operazioni al secondo.




|
|---|
![]()
|
|
||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
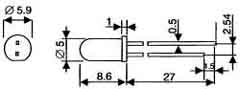
| TSUS4300 Diodo emittente ad infrarosso, 950 nm, GaAs | |
  |
|
| Piedinatura | Datasheet |

| Schema elettrico della scheda |
 |
|
Dettaglio schema porta seriale per collegamento con PC |
 |
Per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda possono utilizzare la nuova scheda della Parallax denominata Scheda USB BoE +chip BS2 + Kit con la possibilità di collegamento tramite USB.
|
|---|
| Elenco revisioni: | |
| 02/11/2009 | Aggiornato nome distributore italiano ditta Parallax |
| 08/04/2008 | Inserito caratteristiche led infrarosso |
| 11/02/2008 | Aggiornato pagina, inserito nuove figure |
| 29/08/2007 | Inserito link alla pagina: Come potenziare la Scheda BS2 trasformandola in una BS2 SX |
| 16/11/2005 | Inserito immagini allegati, e PDF istruzioni di montaggio |
| 20/04/2004 | Emissione preliminare |