Servomotori
ultimo aggiornamento 20 dicembre 2016
|
Servomotori ultimo aggiornamento 20 dicembre 2016 |
|
|
|
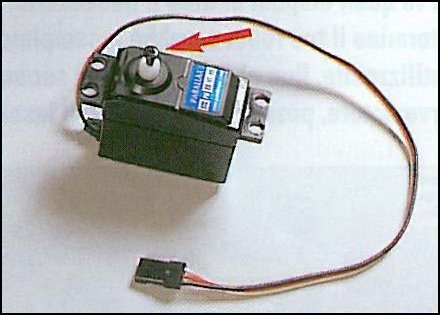
Sotto è visibile la foto di uno dei sue servomotori Parallax allegati ai
fascicoli n° 28 e 30 dell'opera "Costruisci
e programma il tuo robot" , la loro sigla è
STD PM BB HT HS.
Questi servo sono già stati modificati in modo da poter ruotare in continuo e
non solo nel campo 0-180°.
Variando la temporizzazione degli impulsi è possibile far ruotare in senso
orario o antiorario oppure di fermare il perno a cui va collegata
la ruota.
Il servomotore è compatibile con la
scheda DeA Basic Stamp
che con Arduino.
 |
 |

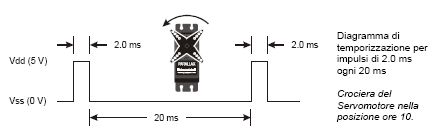
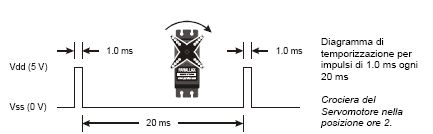
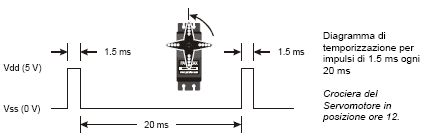
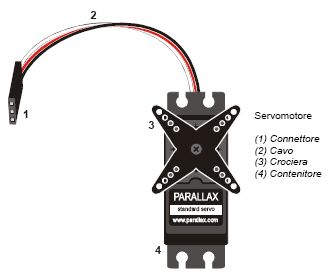

Tabella codice colori del connettore nei più diffusi modelli di servomotore.
|
|

|

|

|

|
 |
 |
 |
 |
| Fascicolo n°27 | Fascicolo n°28 | Fascicolo n°29 | Fascicolo n°30 |
|
|
|
|
Attualmente questo modello di servomotore non è più venduto, in caso di guasto è possibile utilizzare i nuovi Parallax Servo di rotazione continua codice #900-00008, che è perfettamente compatibile con quello precedente
Caratteristiche:
bidirezionale rotazione continua
0-50 giri / min, con una risposta lineare a PWM per una facile rampa
accetta quattro viti di montaggio
facilmente interfacciabile con qualsiasi microcontrollore Parallax o altro dispositivo con uscita PWM
Molto facile da controllare con PBASIC tramite il comando PULSOUT
Con Arduino tramite la libreria servo.h
Specifiche tecniche:
Alimentazione: da 4 a 6 VDC
Corrente Massima: 140 + / - 50 mA a 6 VCDC quando si opera in condizioni di carico non 15 mA quando è in condizione statica
Comunicazione: Pulse-Width Modulation; TTL / CMOS da 3,3 a 5V
Dimensioni : circa 5.58 x 1,9 x 40,6 cm
Temperatura di esercizio: da da -10 a 50 ° C
Peso: 42.5 g
Test servo tramite scheda DeA Basic Stamp Board
Nota: Nella foto e nel filmato è utilizzata una scheda DeA Basic Stamp Board a cui è stata fatta una modifica per montare il processore BSx, come mostrato in questa pagina

|
|
|
Test servo tramite scheda Arduino UNO

|
|
|
| Elenco revisioni: | |
| 20/12/2016 | Inserito programmi ed esempi |
| 13/05/2011 | Aggiornato pagina |
| 13/05/2011 | Aggiornato pagina |
| 20/04/2004 | Emissione preliminare |