![]()


ultimo aggiornamento 4 ottobre 2020
|
ultimo aggiornamento 4 ottobre 2020 |
|
|
|
Le ruote del Robot ArduinoBOT hanno un diametro di 65 mm e sono realizzate in ABS stampato e sono prodotte dalla Solarbotics le potete trovare sotto la voce GM Series Plastic Wheels codice GMPW, queste si adattano perfettamente all'albero di uscita del motoriduttore Gear Motor 2. Per il montaggio si dovrà solamente inserire la ruota sull’albero del motoriduttore e avvitare la vite fornita con la ruota con un cacciavite con impronta a stella, evitando di stringere troppo con il rischio di rompere l’albero motore. Si monteranno poi gli speciali elastici, sempre forniti con la ruota con la funzione di aumentare la trazione e ridurre l’usura della ruota.
![]()

La forma in vendita può differire dal modello nella foto ma la sostanza non cambia, nella confezione oltre alla ruota sono presenti speciali elastici con il compito di sostituire le gomme termoplastiche che permettono di aumentare la trazione e ridurre l'usura. E' inoltre presente la vite autofilettante per il fissaggio della ruota all'albero del motoriduttore.


Supporto posteriore
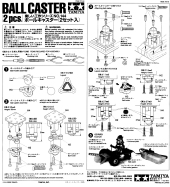
Il supporto posteriore è rappresentato da una ball caster codice 70144 prodotta dalla Tamiya. Il prodotto può essere acquistato presso il sito di Futura Elettronica , codice 7300-BCASTER.
![]()
Nella confezione sono presenti i particolari per realizzare il supporto con un’altezza variabile compresa tra gli 11 e i 35 mm. Nel nostro robot, dovremmo ancora aumentare quest’altezza utilizzando dei distanziali metallici esagonali M/F 3 MA x L=10 mm.


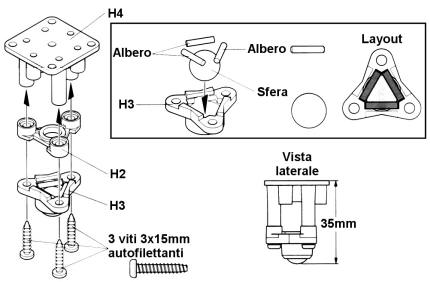
Per il montaggio del supporto si dovranno seguire le istruzioni riportate nella figura sottostante
![]()

Blister contenete il materiale

Contenuto del Blister
| Elenco revisioni | |
| 25/02/2012 | Aggiornato pagina |
| 16/10/2011 | Aggiornato pagina |
| 21/03/2011 | Emissione preliminare |