
ultimo aggiornamento 14 gennaio 2012
|
|
ultimo aggiornamento 14 gennaio 2012 |
|
|
|
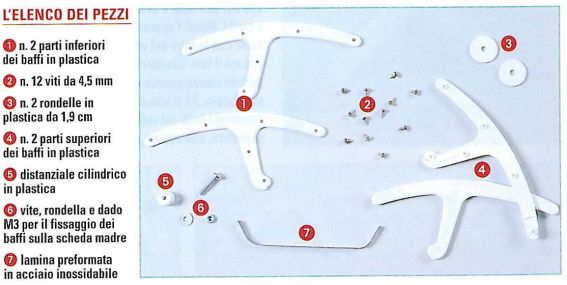
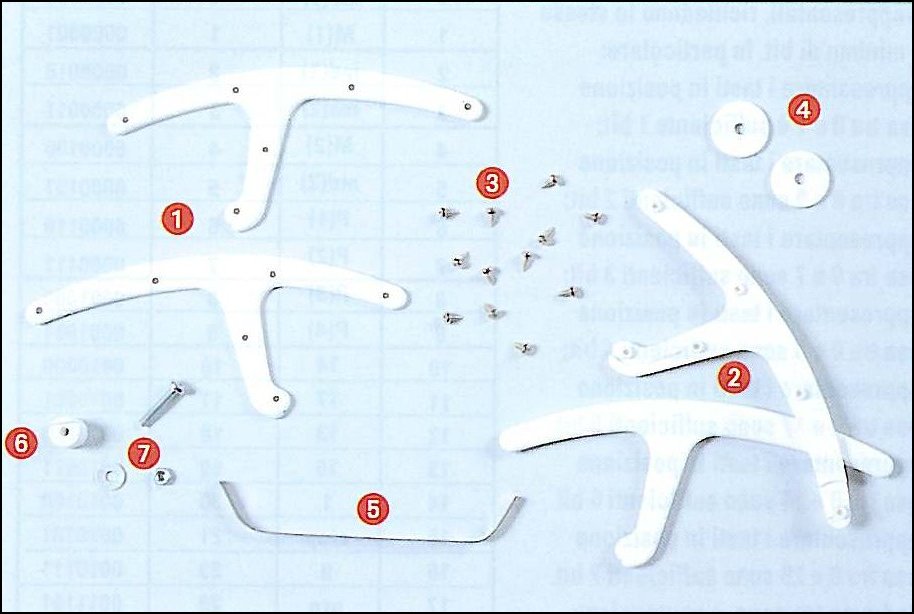
Il robot BUG è dotato nella
parte anteriore di un paio di sensori di contatti.
Per la sua costruzione ho utilizzato il materiale allegato ai fascicoli n° 16
o 42 dell'opera "COSTRUISCI
E PROGRAMMA IL TUO ROBOT".
Questi sono rappresentati da una lamina metallica che con la sua flessione
dovuta ad esempio per un urto si comporta come un interruttore.
Lo schema è visibile nella figura sotto. I due baffi
sono collegati alle porte P4 e P5 del processore.
Per collaudare i sensori, digitare, oppure scaricare il programma visibile
in LISTATO 1

| ' {$STAMP BS2} ' {$PBASIC 2.5} '************************************************************************* 'Collaudo sensori di contatto 'di Adriano Gandolfo 'sito www.adrirobot.it '************************************************************************* DEBUG "Stato dei baffi", CR, "Sinistro Destro", CR, "-------- --------" DO DEBUG CRSRXY, 0, 3, "P6 = ", BIN1 IN6, " P4 = ", BIN1 IN4 PAUSE 50 LOOP |
![]()
Programma prova_sensori
contatto
 |
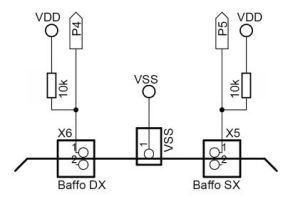 Schema elettrico sensori |
 |
 |
 |
|
 |
 |
||
| Fascicolo n°16 | Fascicolo n°42 | ||
|
|
||
| Elenco revisioni | |
| 14/01/2012 | Aggiornato pagina |
| 04/06/2006 | Emissione preliminare |

