
ultimo aggiornamento 19 luglio 2018
|
ultimo aggiornamento 19 luglio 2018 |
|
|
|
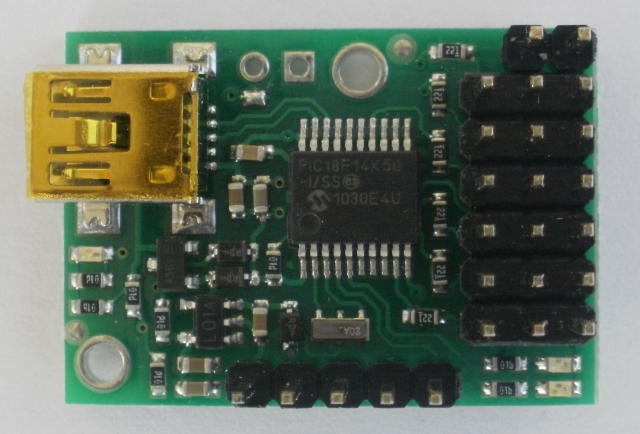
Il
Micro Maestro
è un servo controller molto versatile con pin di I/O general-purpose dalle dimensioni molto contenute (21mm×30mm)
pesa solamente 4.8 g con i connettori. Supporta tre
metodi di controllo: USB per una connessione diretta con il computer, seriale
TTL per l'utilizzo con sistemi embedded, e internal scripting per applicazioni
integrate, senza bisogno di un controllore esterno.
I canali possono essere
configurati come uscite servo per utilizzarli con i normali servo RC da
modellismo o con gli ESC (electronic speed control), come uscite digitali,
oppure ancora come ingressi analogici.
Il segnale per i servo ad alta
risoluzione estremamente preciso, con un jitter minore di 200 ns, fa si che
questo servo controller sia perfetto per applicazioni ad alte prestazioni come
la robotica, e il controllo integrato di velocità ed accelerazione su ciascun
canale rende semplice ottenere movimentazioni morbide e senza scatti senza il
bisogno per il controller di inviare continuamente un flusso di dati con
posizioni intermedie al Micro Maestro.
Ogni scheda può essere collegata in
cascata con altri controllers Pololu su una singola linea seriale.
Per maggiori informazioni vedere la
guida originale sul
sito Pololu.

|
|||||||||||||
Il servo controller viene fornito in kit, ma in realtà tutta la parte smd è già
montata, a voi non resta che montare i connettori strip forniti nella
confezione.
Siccome i canali del Micro Maestro possono essere usati anche come uscite
digitali general-purpose e come ingressi analogici, essi forniscono un modo
semplice per leggere sensori e controllare periferiche attraverso la porta USB
del PC; questi canali possono essere usati insieme al sistema di scripting per
permettere la creazione di applicazioni autonome che rispondano a stimoli
esterni e attivino per esempio dei servo all'arrivo di prefissati eventi.
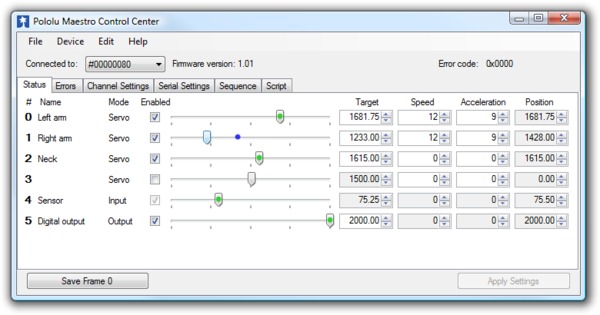
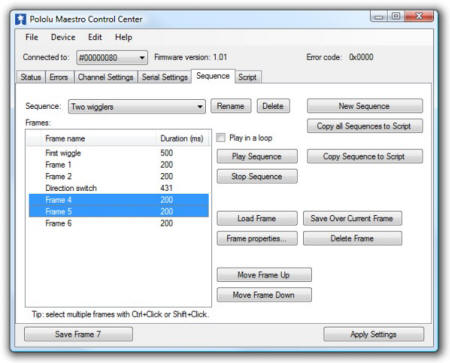
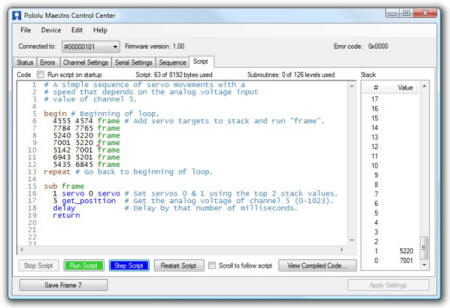
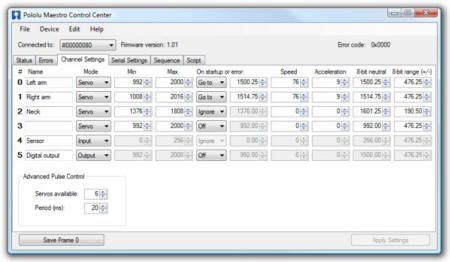
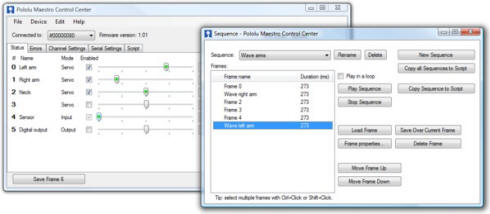
Schermata del programma di gestione
Caratteristiche principali
Tre metodi di controllo: USB, seriale TTL (5V), e scripting interno
Risoluzione del segnale servo di 0.25μs (corrisponde a circa 0.025° per un servo standard)
Frequenza dell'impulso tra 33 e 100 Hz
Ampiezza dell'impulso tra 64 e 3280 μs
Controllo individuale di velocità e accelerazione per ciascun canale
I canali possono essere configurati a piacere per andare su una posizione specifica all'accensione o durante un errore
I canali possono essere usati come I/O digitali general-purpose o come input analogici
Un semplice linguaggio di scripting permette di programmare il controller per effettuare azioni complesse anche dopo la rimozione della connessione USB e seriale
Programma gratuito per Windows e Linux per la configurazione e la programmazione, creazione e salvataggio di sequenze di movimenti, per la creazione ed esecuzione degli script memorizzati nel servo controller
Due metodi per scrivere il software per controllare il Micro Maestro dal PC:
-
Virtual COM port rende semplice l'invio di comandi seriali da qualunque
ambiente di sviluppo che supporta la comunicazione seriale
- Pololu USB Software Development Kit (scaricabile dalla resources tab del
sito Pololu) permette l'uso di comandi USB nativi più avanzati e include
programmi di esempio in C#
Caratteristiche della serialeTTL:
-
Supporta 300 – 200'000 bps nel fixed-baud mode, 300 – 115'200 bps nell'autodetect-baud
mode
-
Supporta contemporaneamente il protocollo Pololu, che da accesso a
funzionalità avanzate, e il più semplice protocollo Scott Edwards MiniSSC II
-
Può essere collegato in catena con altri controller Pololu usando una
singola linea di trasmissione seriale
-
Può funzionare come un generico adattatore USB / seriale TTL per progetti
controllati da PC
La scheda può essere alimentata dalla USB oppure da una batteria esterna da 5 – 16 V, e la tensione 5V regolata è resa disponibile in uscita per l'utente
Dimensioni compatte di solo 2.1mm × 30mm,
Firmware upgradabile.
|
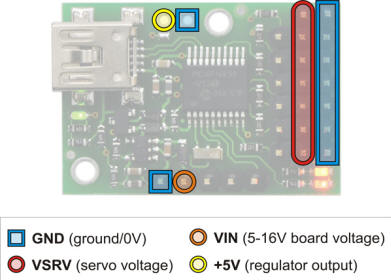
L'alimentazione del processore può essere fornita dalla presa USB o da un alimentatore esterno da 5-16V collegato agli ingressi VIN e GND. È meglioavere una alimentazione esterna collegata al tempo stesso che USB è connesso, in tal caso il processore sarà alimentato dall'alimentatore esterno. Si noti che se l'alimentazione esterna scende sotto 5 V, il corretto funzionamento non è garantito, anche se la presa USB è collegata. |
| Connessioni alimentazione servo sono forniti in alto a destra della scheda Micro Maestro. L'alimentazione è fornita direttamente ai servi, senza passare attraverso un regolatore, in modo che le uniche restrizioni siano la potenza dell'alimentatore e che sia in gradi di fornire la corrente necessaria, approssimativamente l'assorbimento di corrente di un servo media grandezza è di 1 A. |
| L'uscita 5V consente di alimentare i dispositivi 5V propri dalla on-board regolatore 50mA o direttamente da USB. Il bordo regolatore è utilizzata quando VIN è alimentato, in questo caso, poiché il Maestro richiede 30 mA, vi è circa 20 mA disposizione di altri dispositivi di potenza. |
| Le linee SIG (0, 1, 2, ...) vengono utilizzati per l'invio di impulsi ai servi, controllando le uscite digitali, oppure per misurare tensioni analogiche. Queste linee sono protette da resistenze 220Ω. Il limite di corrente totale (in o out) per questi pin è di 60 mA, ma quando si utilizza il regolatore on-board la corrente è limitata a 20 mA. |
| La linea RX
è utilizzato per ricevere non invertita TTL (0-5 V) bytes
seriali, quali quelli UART microcontrollore. Questi byte può
essere sia per i comandi seriali, byte Maestro arbitrarie da
inviare al computer tramite la connessione USB, o entrambi. Si noti che il Maestro sarà probabilmente in grado di ricevere segnali TTL con livelli di 3,3V, ma non è garantito che sia in grado di leggere segnali di 3.3V, è conveniente elevare questa tensione sopra i 4 V, se si vuole assicurare affidabilità di funzionamento. |
| La linea TX trasmette non invertita TTL (0-5 V) bytes seriali. Questi bytes possono essere le risposte ai comandi seriali inviati al Maestro, o byte arbitrari inviati dal computer tramite la connessione USB. |
| Il pin di
RST
può essere guidato basso per eseguire un hard reset del
microcontrollore del Maestro, ma questo non dovrebbe in
generale essere necessario per applicazioni tipiche. La linea è internamente a livello alto, così è possibile lasciare questo pin scollegato. |
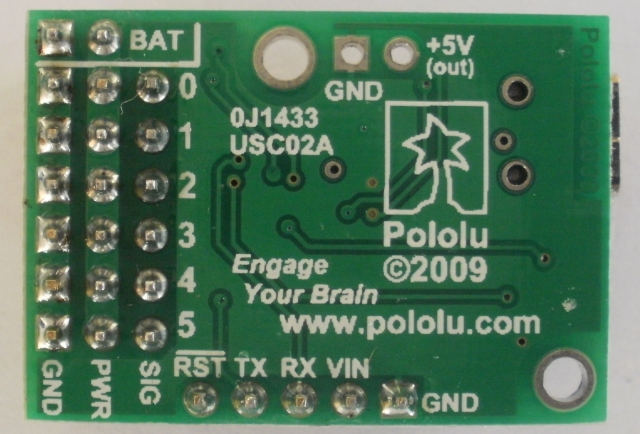
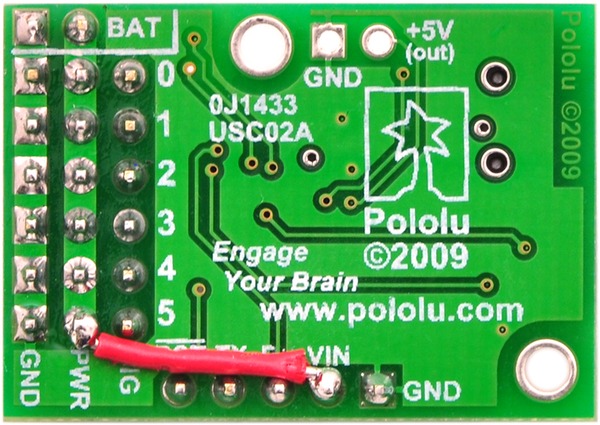
La faccia posteriore della scheda riporta i nomi di tutte le connessioni, inoltre i due fori di fissaggio vi permetteranno di assemblare in modo sicuro il vostro progetto.
Il modulo Micro Maestro ha tre indicatori LED:
Il LED verde indica lo stato del dispositivo
USB. Quando il modulo non è
collegato a un computer tramite il cavo USB, il LED verde sarà spento.
Quando si
collega il modulo alla presa USB, il LED verde inizierà a lampeggiare lentamente. Il
lampeggiamento continua fino a quando il modulo riceve un messaggio particolare
dal computer che indica che i driver USB siano installati
correttamente.
Dopo che il modulo riceve questo messaggio, il LED verde si
accende, ma lampeggia brevemente quando c'è attività USB.
Il LED rosso error/user di solito indica un errore. Il LED rosso si accende quando si verifica un errore, e si spegne quando i flag di errore sono stati cancellati. Il LED rosso può anche essere controllato dallo script utente, il LED rosso si accende se c'è un errore o se il comando script per accenderlo è stato eseguito.
Il LED giallo indica lo stato di controllo. Quando il
modulo è in
modalità di auto-baud detect (di default) e non ha ancora rilevato il baud rate,
il LED giallo lampeggia lentamente. Durante questo periodo il
modulo non
trasmette alcun impulso ai servo. Una volta che il modulo è pronto a pilotare i
servi, il LED giallo lampeggia brevemente e periodicamente.
La frequenza del lampeggio
è proporzionale al periodo di servo (la quantità di tempo tra gli impulsi su un
singolo canale), con un periodo di 20 ms del lampeggio si verifica circa una
volta al secondo. Il numero di lampeggi indica lo stato: un
singolo flash indica che nessuno dei servi sono abilitati (non vengono inviati
impulsi) e tutti i canali di uscita sono bassi, mentre un doppio lampeggio
indica che almeno uno dei servi è abilitata o uno dei canali di uscita viene
guidato alto. I Maestri Mini solo emettono lampi singoli. Inoltre, quando un
comando di serie valido viene ricevuto, il LED giallo emette un breve lampo dim
che termina quando il successivo comando di serie valido viene ricevuto o quando
il principale avviene lampeggiante (se precedente).
Quando il Maestro viene reimpostato in qualche altro modo di essere inizialmente
acceso, il rosso e / o giallo LED lampeggiano quattro volte per indicare la
condizione di reset:
LED Giallo spento, LED rosso lampeggiante: Questo si verifica quando l'alimentazione 5 V scende al di sotto di circa 3,0 V, di solito a causa di batterie scariche o un alimentatore inadeguato.
LED giallo lampeggiante, LED rosso spento: il modulo è stato ripristinato da un bassa tensione sulla sua linea di RST.
LED giallo e LED rosso lampeggiano insieme: un crash del firmware portato ad un "watchdog" reset. Questo si verifica anche subito dopo un aggiornamento firmware, come una parte normale del processo di aggiornamento.
LED giallo lampeggiante , LED rosso fisso: Un errore di firmware ha portato in un soft reset. Questo non dovrebbe mai verificarsi durante il normale utilizzo.
E' disponibile sul sito della Pololu un programma gratuito per Windows e Linux per la configurazione ed il controllo della scheda, permettendo in modo semplice di testare e configurare tramite USB il controller, creare sequenze per i movimenti dei servo montati sui robot, e scrivere passo passo e far girare gli script memorizzabili nel servo controller. Il Micro Maestro ha un memoria interna per gli script di 1 KB che permette la memorizzazione delle posizioni sequenziali che dovranno assumere i servo in modo automatico senza bisogno di alcun collegamento con PC o microcontrollori esterni.
Collegare dei servomotori ad una
scheda Arduino
UNO è una cosa piuttosto semplice, basta collegare l’alimentazione, il
cavo del segnale del servo ad una delle tante porte digitali presenti. La
gestione è facilitata dall’opportuna libreria già presente nelle librerie
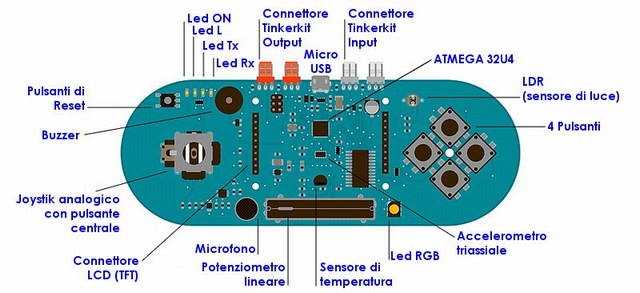
standard. Ma cosa succede se come nel caso della
scheda Arduino Esplora
le porte digitali disponibili sono solamente due e i servo da comandare sono
molti di più.
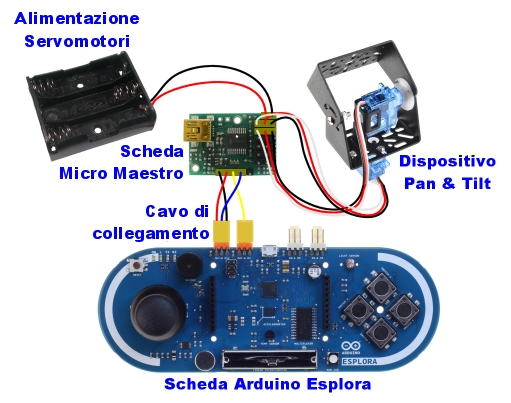
La soluzione più semplice è quella di utilizzare un modulo specifico come il
Micro Maestro
prodotto dalla Pololu, questo, permette tramite una linea seriale
per la ricezione dei comandi di comandare sino a 6 servomotori

Le mie pubblicazioni su

Il progetto è
descritto in un articolo pubblicato sul sito
Elettronica Open
Source.
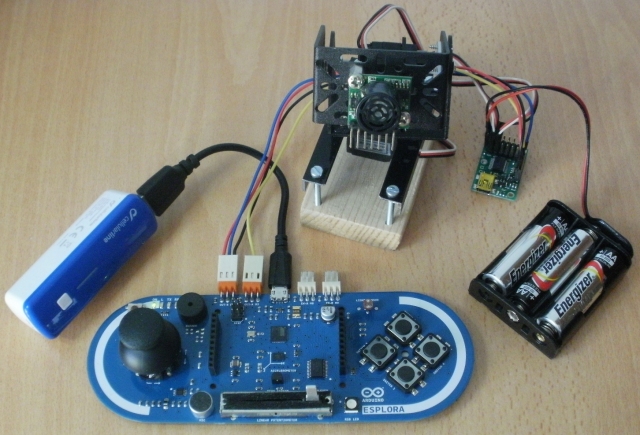
Il comando del dispositivo è realizzato tramite una
scheda Arduino Esplora e un moduli appositamente creati
per comandare i servomotori.
Per vedere il progetto e scaricare il
programma
vedere la pagina.
| Elenco revisioni | |
| 19/07/2018 | Aggiornato pagina |
| 01/02/2015 | Inserito riferimento articolo e progetto per gestione con Arduino Esplora |
| 02/03/2012 | Emissione preliminare |