![]()
FEETECH 2CH Servo Motor
Controller per DC Motor
FT-SMC-2CH
ultimo aggiornamento 7 novembre 2017
|
FEETECH 2CH Servo Motor
Controller per DC Motor ultimo aggiornamento 7 novembre 2017 |
|
|
|
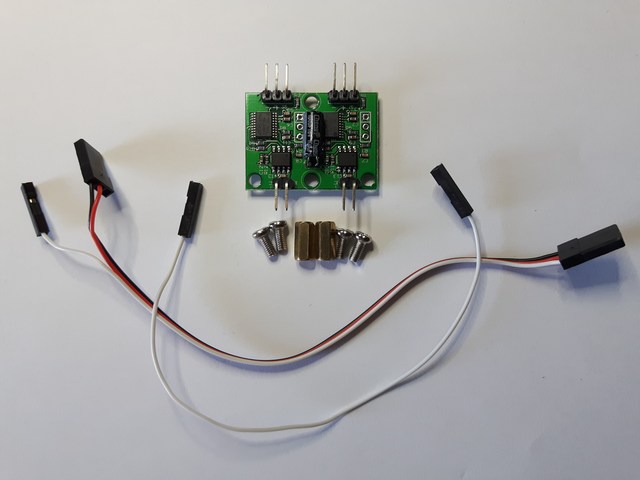
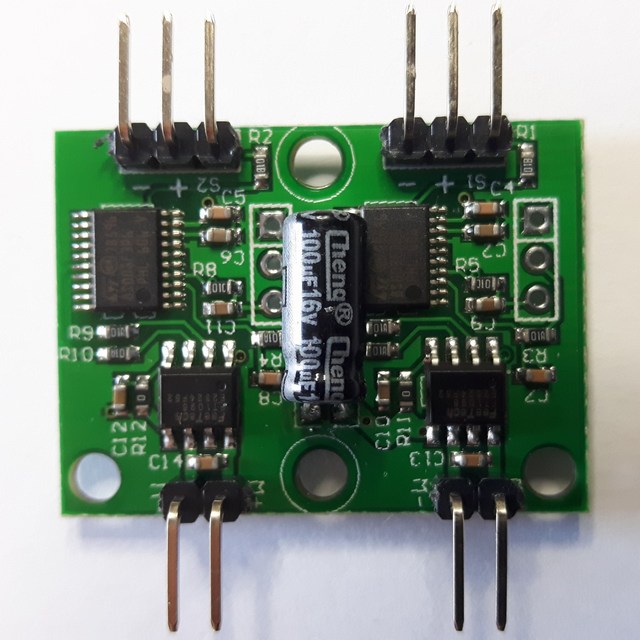
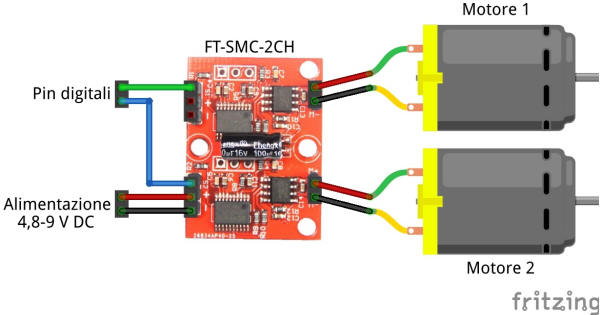
Il modulo driver per motori
FT-SMC-2CH prodotto
dalla
FEETECH
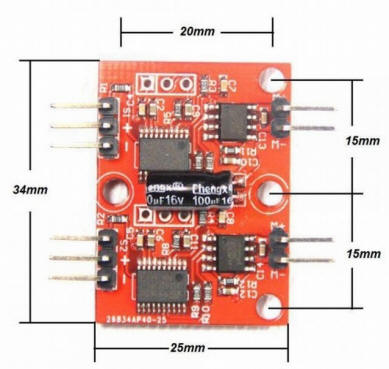
RC Model Co.,Ltd. è di piccole dimensioni, misurando solo 34x25
mm, permette di pilotare due motori a corrente continua, per esempio il modello
FM90 prodotto sempre da
FEETECH, con controllo di
rotazione continua bidirezionale, la corrente massima è 1,3 A per una tensione
consigliata di 6V.
La confezione contiene oltre al modulo i cavi per il collegamento alla scheda di
controllo, 2 distanziali e 4 viti per il fissaggio al telaio del robot.
![]()


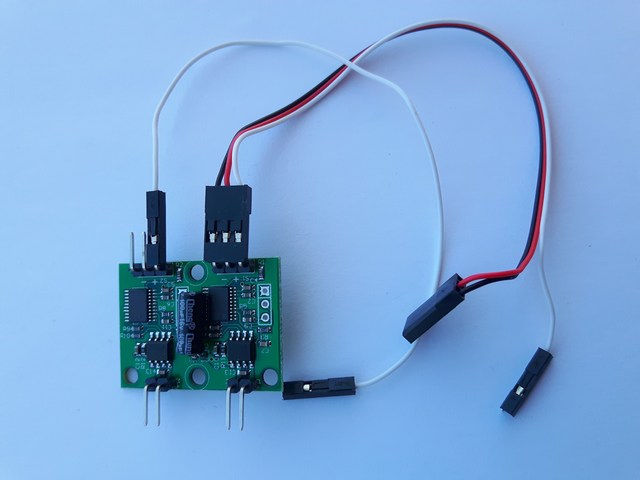

Il modulo che può essere applicato a piccole
piattaforme robot mobili, dispone di due controller
STM8S003F3P6, che
possono essere riprogrammati dal
programmatore FEETECH, con esso è facile controllare due motori
a corrente continua con controllo della rotazione continua
bidirezionale, la velocità è una risposta lineare al controllo PWM.
I modulo presenta quattro viti di montaggio.
È facile per interfacciarsi con qualsiasi microcontrollore Arduino
o dispositivo che abbia capacità di controllo PWM.
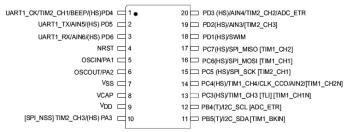
| Processore STM 8S003F3P6 - 8-bit Microcontrollers - MCU 8-bit MCU Value Line 16 MHz 8kb FL 128EE | ||
 |
 |
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
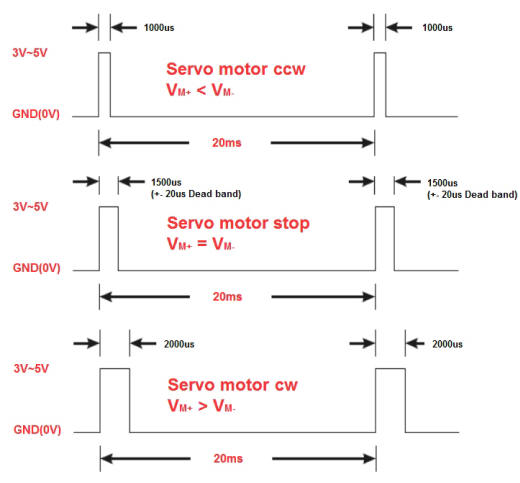
A differenza dei normali controllori di
motori basati su ponti H, il controllore
FT-SMC-2CH
utilizza la modulazione di larghezza di impulso.
La
velocità e la direzione di rotazione sono determinati dalla durata
di un impulso High, nella gamma 1000μs - 2000μs.
Per una di avere una rotazione regolare, il servo ha bisogno di un 20 ms
pausa tra gli impulsi.
Poiché la lunghezza dell'impulso diminuisce dal 1500μs, il servo
gradualmente ruoterà più velocemente in senso antiorario.
Allo stesso modo, come la lunghezza degli impulsi aumenta da
1500μs il servo gradualmente ruoterà più velocemente in senso
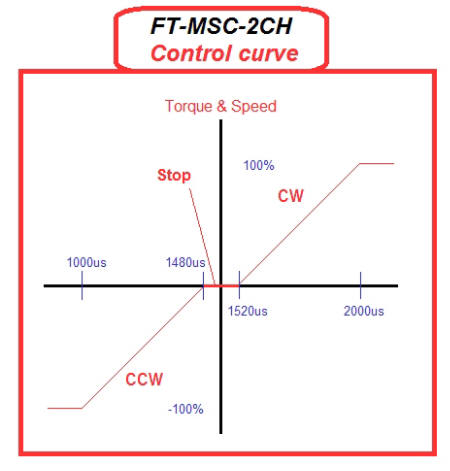
orario, come si può vedere nella figura seguente:
 |
 |
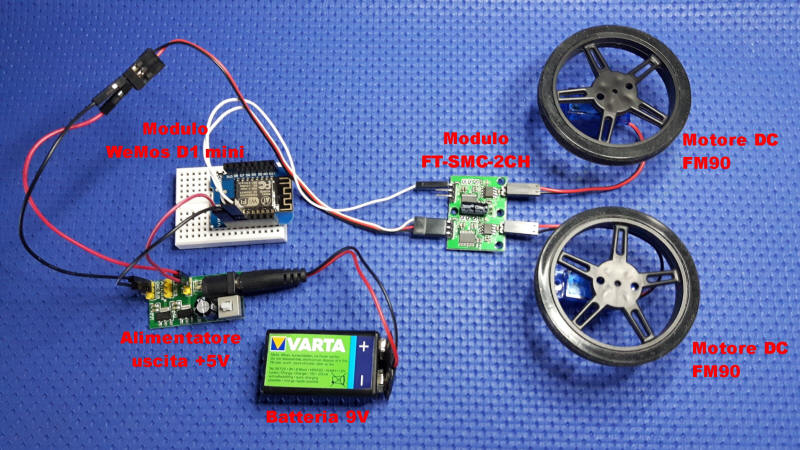
Esempio gestione con WEMOS D1 mini
Per testare il driver motore utilizziamo come modulo di controllo un Wemos D1 mini, per la gestione dei motori è sufficiente utilizzare la libreria #servo presente di default nell'IDE di Arduino.
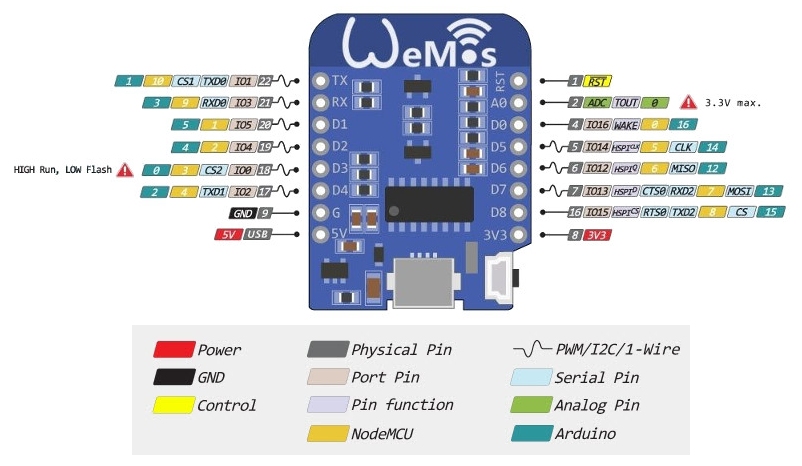
Per stabilire il senso di rotazione, per variare la velocità, per fermare la rotazione dei motori sarà sufficiente variare il valore dei microsecondi inserito nel comando, secondo i valori riportati nel grafico "Control curve" riportato sopra.
motore1.writeMicroseconds(1000);
|

|
|
Altri modelli di moduli controllo motori
 |
 |
 |
|
 |
 |
 |
 |
|
|
| Elenco revisioni | |
|
07/11/2017 |
Emissione preliminare |

