![]()
Modulo H-Bridge L9110 (HG7881)
ultimo aggiornamento 27 aprile 2019
|
Modulo H-Bridge L9110 (HG7881) ultimo aggiornamento 27 aprile 2019 |
|
|
|
Indice
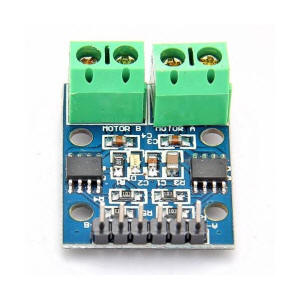
Vediamo in questa pagina una scheda compatta e dal costo che si aggira sui 3 € prodotto dalla ELECROW codice AML9110DM, utilizzabile per il pilotaggio di piccoli motori in DC.

![]()

Questo modulo utilizza 2 chip H-bridge tipo
L9110
(oppure tipo HG7881) indipendenti ognuno
dei quali può pilotare un motore con una corrente di esercizio fino
800mA, con una corrente massima di picco di 1.5-2A
La scheda può essere
pilotata con livelli logici TTL compresi tra 2,5 V e 12 V questo
permette l'utilizzo con microcontrollori alimentati a 3.3V oppure 5V.
La velocità dei motori può venire controllata tramite PWM, mentre la direzione
è data da un livello logico.
Questo modulo può anche essere
utilizzato per pilotare un motore passo-passo a due fasi.
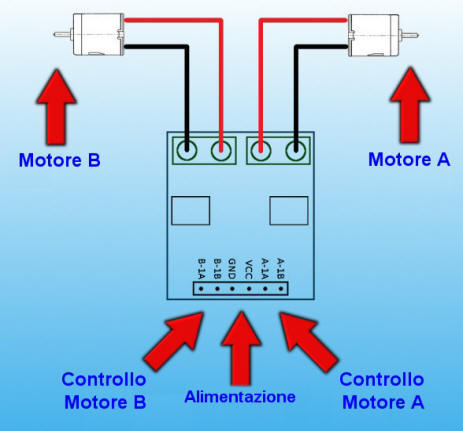
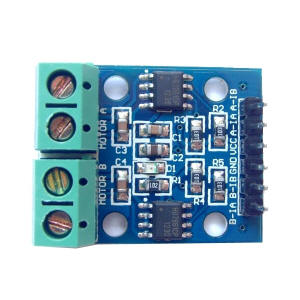
La scheda dispone di 6 pin maschio e 2 terminali doppi. I motori si
collegano ai 2 terminali. I pin di alimentazione VCC e GND sono posti al
centro del connettore.
I modulo a differenza degli H-bridge come la
L293 e
L298 non richiede una
tensione separata per la parte logica e per l'alimentazione dei motori
ma sarà sufficiente fornire uno tensione compresa tra i 2,5 e i 12V.
Caratteristiche:
Alimentazione motore e modulo: da 2.5V a 12V
Pilota 2 Motori in CC oppure un singolo motore passo passo
Massimo assorbimento per canale: 800mA continui
Dimensioni: 31mm x 22mm x 12mm
Peso: 7 gr.
Altri modelli di moduli controllo motori
 |
 |
 |
|
 |
 |
 |
 |
|
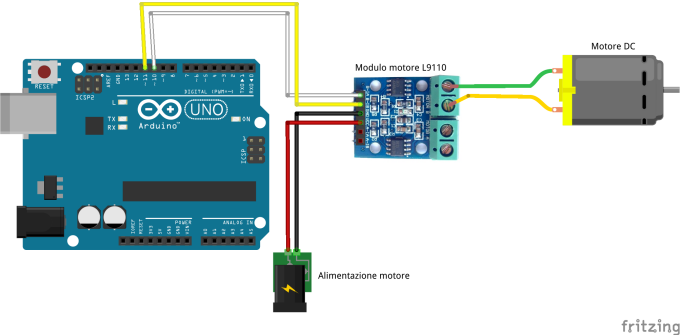
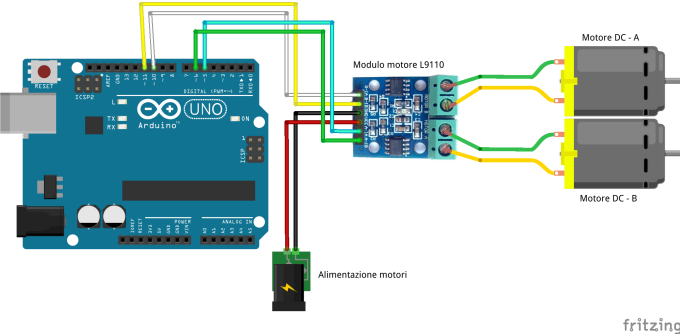
Esempio di utilizzo del modulo controllo motori L9110
![]()
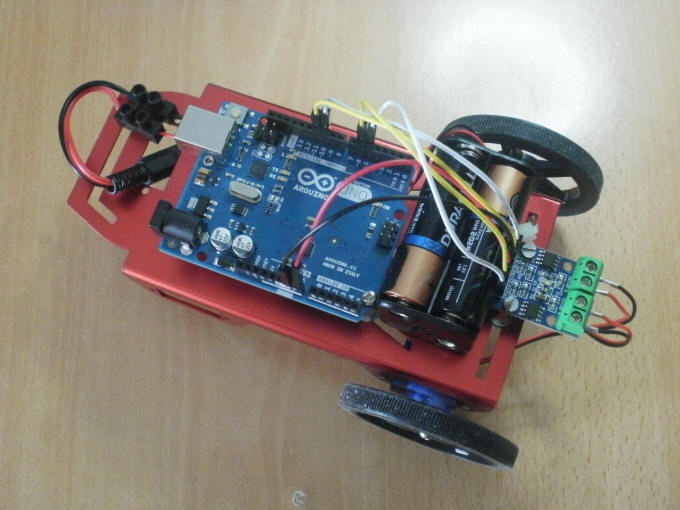
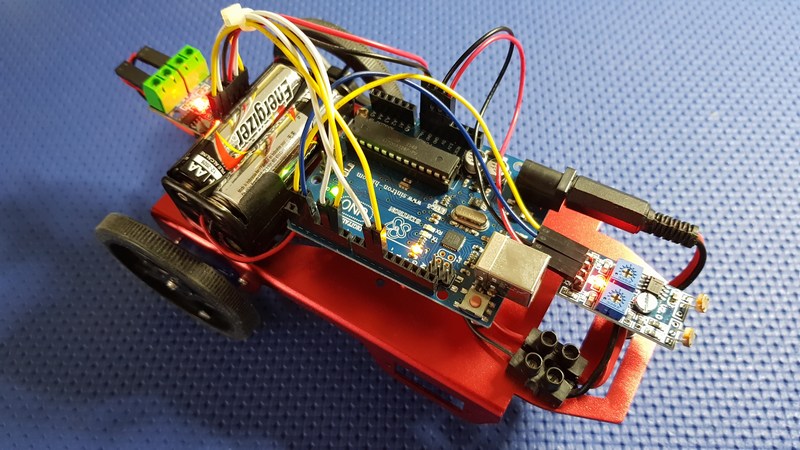
Il robot RoboPad, è basato sul kit 2WD Mini Robot Mobile Platform FT-MC-001, il comando del robot è realizzato tramite un Gamepad Shield virtuale su Smartphone collegato tramite collegamento bluetooth tramite lo shield 1Sheeld.
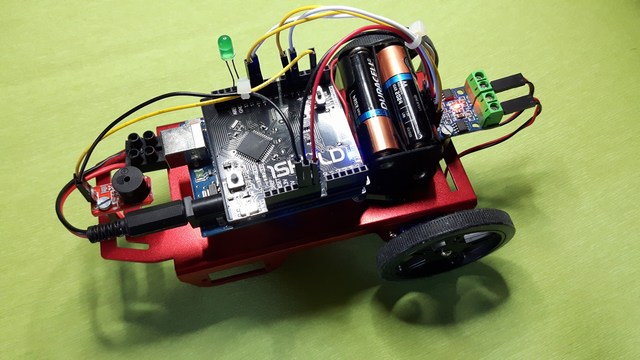
Sotto è riportato un possibile uso del sensore 2-Channel Photosensitive Resistance Sensor, posto nella parte frontale, permette al robot di seguire o allontanarsi da una fonte di luce posta frontalmente
| L9110 - Motor control driver | ||
 |
|
 |
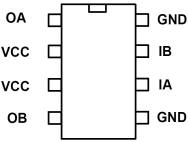
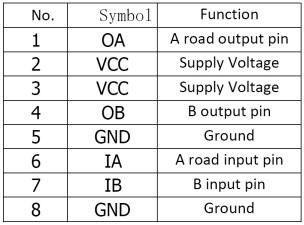
| Piedinatura | Datasheet | Foto dell'integrato |
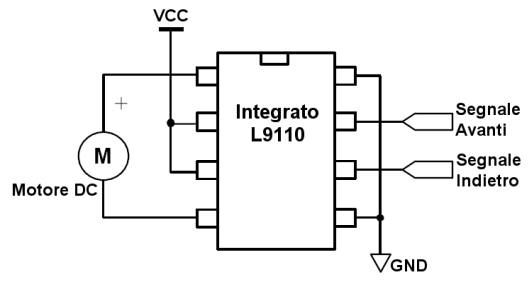
Schema di principio del collegamento dell'integrato
|
|||||||||||||||||||||||||||||||||||
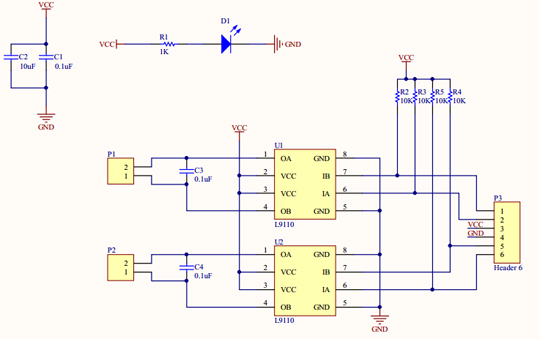
Lo schema elettrico del modulo è molto semplice, il collegamento del'integrato L9110 è quello tipico riportato nel datasheet, sugli ingressi di controllo sono presenti delle resistenze da 10K per mantenere stabile il segnale di controllo, la tensione di alimentazione è filtrata dai due condensatori C1 e C2, è inoltre presente il diodo led D1 con la sua resistenza di limitazione R1 da 1K la cui accensione segnala la presenza della tensione di alimentazione. Sulla morsettiera d'uscita verso i motori sono presenti due ulteriori condensatori di filtro C3 e C4 da 0,1 uF.
|
|
|
| Elenco revisioni | |
|
27/04/2019 |
Aggiornato pagina |
|
05/06/2016 |
Emissione preliminare |

