Scheda di potenza
ultimo aggiornamento 16 giugno 2006
|
Scheda di potenza ultimo aggiornamento 16 giugno 2006 |
|
|
|
| La scheda
di potenza ha il compito di pilotare i 3 motori del
robot
Pathfinder. Su di essa sono presenti 3 ponti H realizzato
mediante
transistor in configurazione Darlington PNP, formati da transistor modello
BC558 e
BD136, e da altri Darlington NPN costituiti da due transistor modello
BC548 e
BD135. Questa scheda è fondamentale nel controllo del robot Pathfinder dato che in essa è contenuto tutto il sistema elettronico di amplificazione e potenza per i motori incaricati del movimento del robot, sia con le ruote che con le zampe. Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 19 al n° 27 |
|
|
 File PDF LABORATORIO PRATICO |
 File PDF COSTRUZIONE DEL PATHFINDER |
|
| Fascicolo n°19 | Fascicolo n°20 | Fascicolo n°21 | Fascicolo n°22 | Fascicolo n°23 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
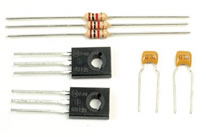
1 Circuito stampato circuito di potenza |
3 Resistenze 1 kohm |
6 Resistenze 10 Kohm |
2 Transistor BD135 |
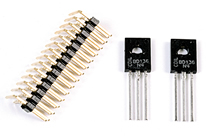
2 Connettori maschio 2 poli per c.s. |






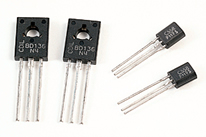
2 Transistor BD136
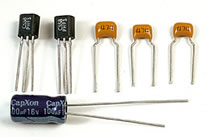
2 Transistor BC558
2 Transistor BC558
3 Condensatori 470 nF
1 Condensatori Elettr. 100 uF
2 Transistor BD136
2 Transistor BC558
2 Transistor BD136
1 Connettore maschio 14x2 per c.s.
Schema elettrico della scheda
 |
|
||||||||||||||||||||||||||
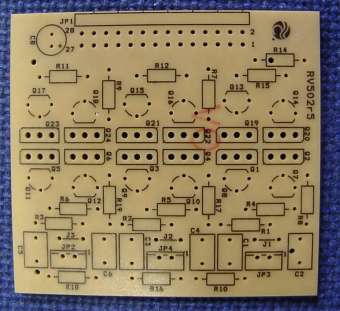 Circuito stampato |
 Foto di uno dei motori di Pathfinder completo di sensore |
Iniziamo ora l'analisi della scheda
di potenza.
La scheda di potenza si inserisce all'interno della
scheda di interfaccia nel connettore JP14.
Tramite la scheda di interfaccia mettiamo in comunicazione la scheda di potenza
con quella di controllo, in cui risiede il microcontroller che ha il compito di
inviare i segnali di controllo verso i motori.
La funzione della scheda di potenza sarà di amplificare i segnali di
controllo del microcontroller verso i motori con livelli di tensione e corrente
adatti allo scopo
La scheda di potenza può gestire tre motori, sia per l'accensione e lo
spegnimento, sia per il senso di rotazione.
Sia nella configurazione a sei piedi che nel modo veicolo sarà necessario
utilizzare tre motori per fare in modo che il robot possa funzionare.
Nella configurazione veicolo: due motori servono per la trazione
delle ruote posteriori, grazie alle quali Pathfinder avanza.
Il terzo muove un meccanismo situato nella parte anteriore che ha il compito di
sterzare
Nella configurazione a sei piedi: abbiamo sempre bisogno di tre
motori, gli stessi che utilizzavamo nel modo veicolo. I motori laterali
muoveranno i piedini anteriori e posteriori e permetteranno al robot di
avanzare.
Il motore centrale avrà il compito di muovere i piedini centrali, che sono
incaricati di sollevare il robot sui due lati, in modo che il resto dei piedini
possa avanzare o retrocedere.
Quando lavoriamo con i motori di Pathfinder, è consigliabile non
alimentare il robot con una tensione superiore a 7,5 V. La scheda di potenza può
gestire tensioni superiori, però i motori avrebbero una coppia di avanzamento
tale per cui si potrebbe danneggiare la meccanica del robot. La tensione
ottimale di funzionamento per i motori, si ottiene con cinque pile inserite nel
porta batterie di Pathfinder.
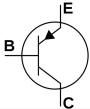
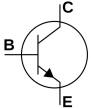
Nell'immagine possiamo vedere il simbolo elettronico di un transistor tipo Darlington.
Si tratta di un transistor formato dall'unione di due transistor, e permette di amplificare la corrente molto di più di un transistor normale.
Sulla scheda di potenza disponiamo di transistor Darlington PNP, formati da transistor modello
BC558 e BD136, e da altri Darlington NPN costituiti da due transistor modello
BC548 e BD135
|
|
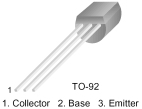
| Transistor PNP BC558 | ||
  |
|
 |
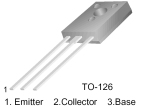
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Transistor PNP BD136 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Transistor NPN BC548 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Transistor NPN BD135 | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
Nell'immagine è riportato lo schema elettronico della parte della scheda di potenza formata dai
transistor Darlington PNP.
Questi transistor ricevono la tensione di alimentazione che bisogna fornire ai motori.
Sono collegati a una rete formata da una resistenza e un condensatore in parallelo, per garantire che i transistor siano in interdizione nel caso in cui il PIC non sia sullo zoccolo, o il segnale di controllo indichi che devono rimanere spenti.
Questo schema formato da transistor Darlington NPN è la seconda parte importante del circuito. Questi saranno i transistor che riceveranno sulla loro base i segnali del microcontroller. In funzione dei segnali di controllo che si inviano tramite il PIC, si polarizzano i transistor in modo che permettano o meno il passaggio della corrente tramite i connettori dei motori JP2, JP3 e JP4.
In questa immagine possiamo vedere lo schema completo formato da tutti i transistor. Il loro compito è amplificare il segnale di controllo che arriva dal PIC in corrente e tensione, per fare in modo che i motori possano funzionare.
Questa configurazione a quattro transistor per il controllo di ogni motore, è denominata ponte ad H.
Possiamo osservare come la polarizzazione dei transistor NPN tramite i segnali di controllo, provochi a sua volta la polarizzazione dei transistor PNP.
In questo modo, i rami conducono e i motori ricevono corrente.
|
|
Tramite il connettore JP1, la scheda di potenza verrà collegata alla scheda di espansione e riceverà i segnali di controllo del
microcontroller.
|
| Elenco revisioni: | |
| 16/06/2012 | Aggiornato grafica pagina |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 01/12/2005 | Aggiornato pagina |
| 09/11/2004 | Aggiornato pagina |
| 02/04/2004 | Emissione preliminare |