![]()
Magician chassis
ultimo aggiornamento 14 marzo 2015
|
Base per robot Magician chassis ultimo aggiornamento 14 marzo 2015 |
|
|
|
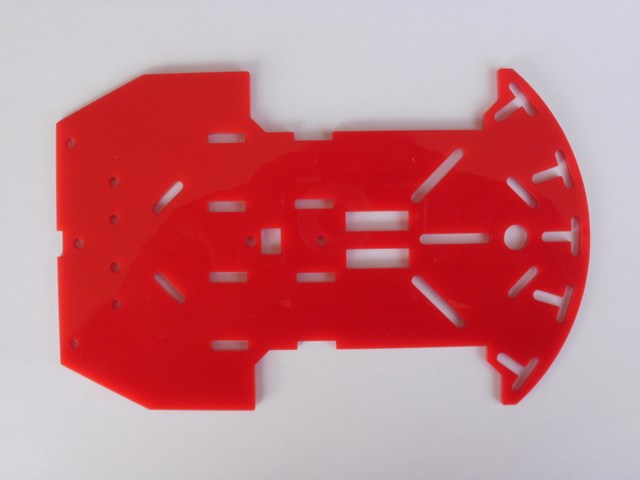
Magician chassis è una base per
robotica
prodotta dalla
DAGU
Hi-Tech Electronic Robotics.
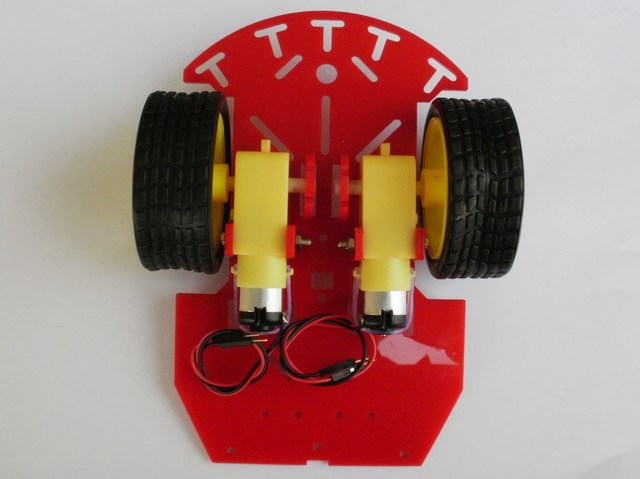
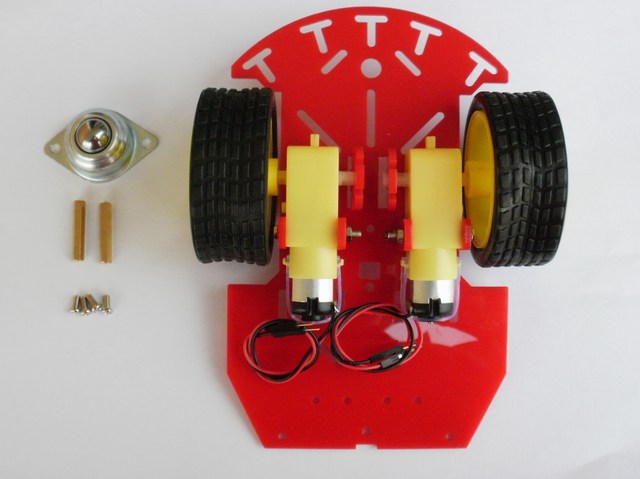
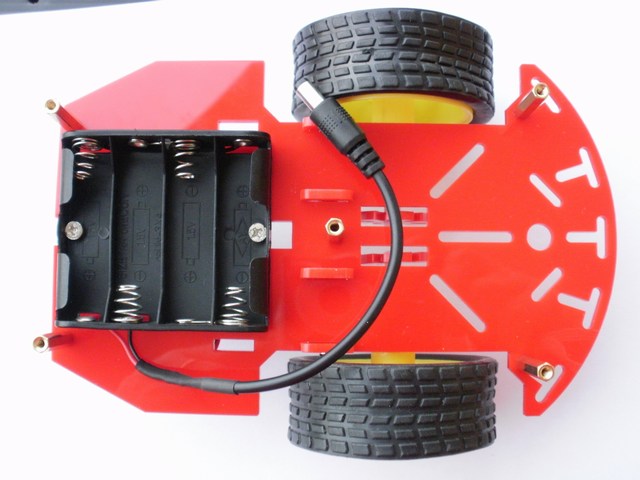
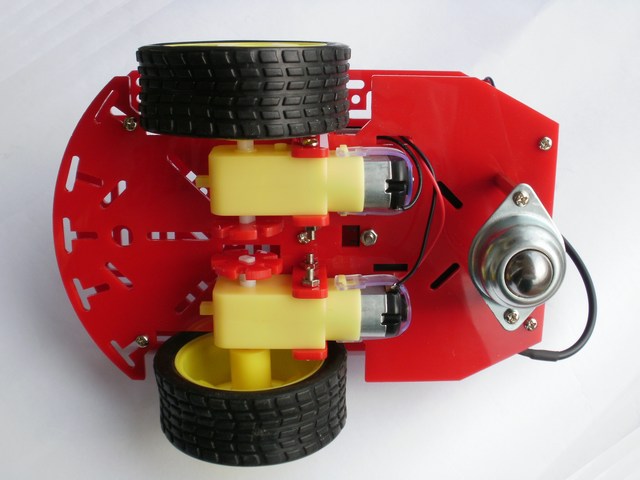
È dotato di due motoriduttori con 65 millimetri ruote
e una ball caster posteriore, le piastre del telaio sono realizzati in plastica acrilica
e presentano una
grande varietà di fori di montaggio per sensori, schede di controllo, ecc.
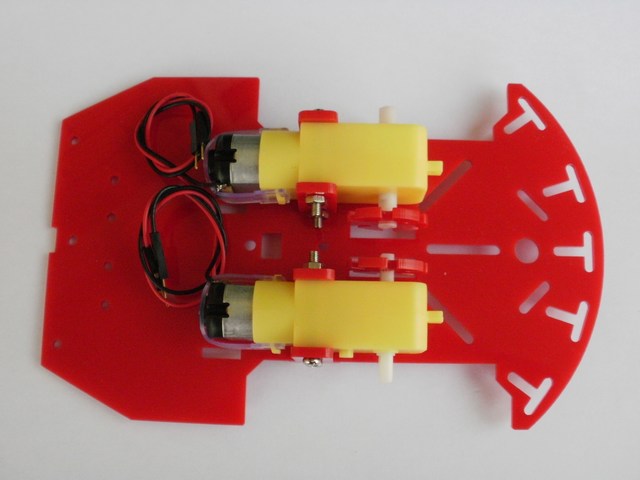
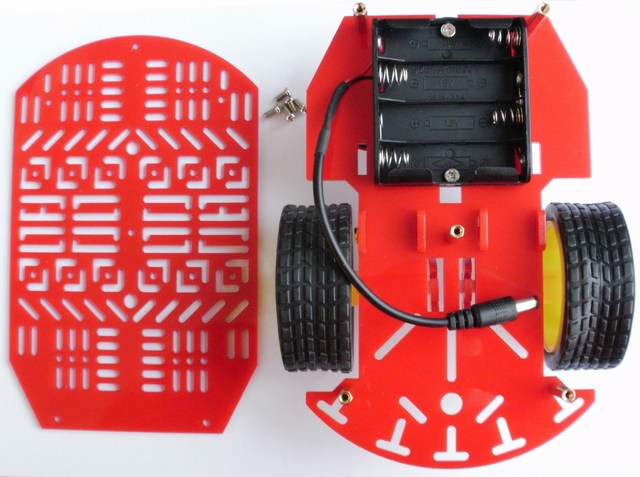
Basta
imbullonare le due piattaforme pre-tagliate insieme, collegare i motori e ball
caster
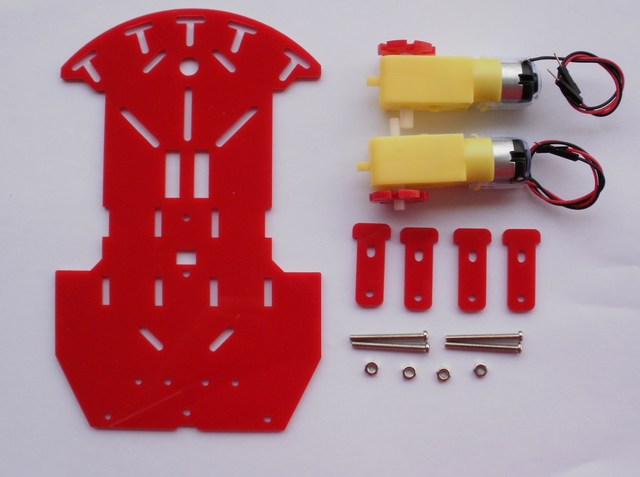
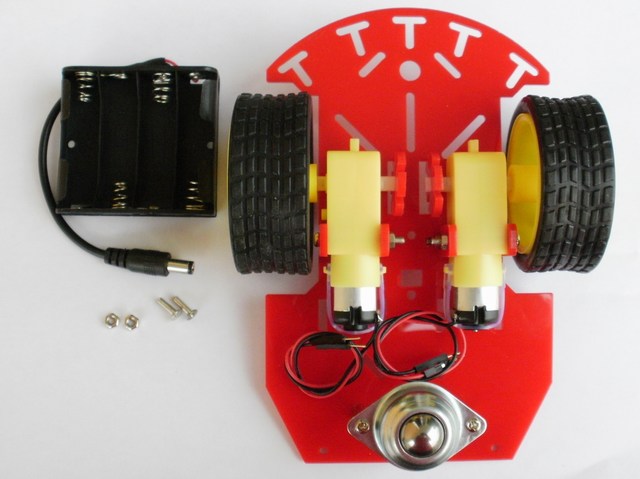
e aggiungere il controller di robotica preferito. Questo kit include tutti i
componenti necessari per assemblare il telaio e un porta-batteria 4xAA con
terminazione a jack.
Nella confezione sono presenti le semplici
istruzioni di montaggio
|
Manuale di montaggio |
|
Caratteristiche principali
|
Caratteristiche principali
|

Particolari costruttivi del robot
|
|||||||||||||||||||||||||||||||||
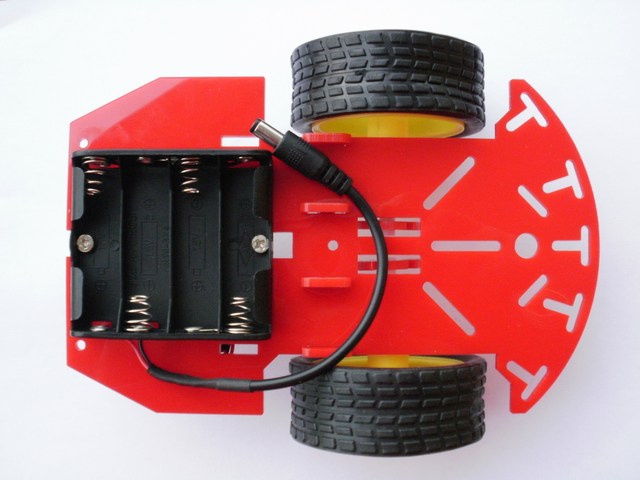
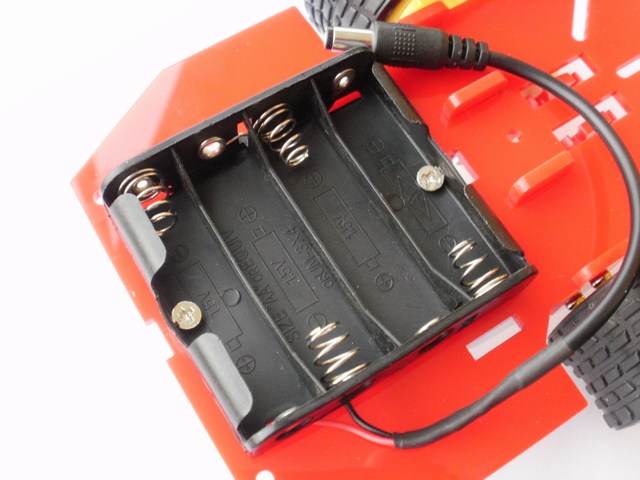
Fasi di montaggio del robot
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Elenco revisioni | |
|
14/03/2015 |
Emissione preliminare |