![]()


ultimo aggiornamento 23 novembre 2013
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 23 novembre 2013 |
|
|
|
Il
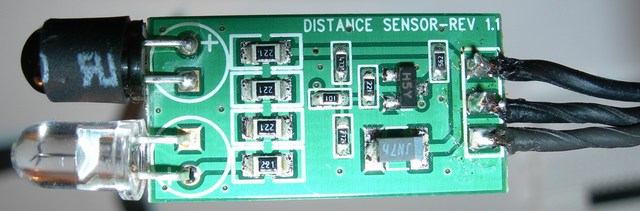
sensore di prossimità allegato al fascicolo n° 48 è di tipo attivo ed è composto da un led IR emettitore
(elemento attivo), quello bianco, e da uno ricevitore (elemento passivo), quello
con il filtro e la sua misurazione si basa sulla intensità di radiazione (NON
luce perché non visibile ai nostri occhi) infrarossa riflessa ricevuta;
L' elemento attivo del sensore è sempre in funzione e non è disattivabile via
software per ridurre i consumi quando non viene utilizzato; del resto i pin
utilizzabili sono solo 3 e la linea segnale non è bidirezionale per cui il led è
stato collegato direttamente alla linea di alimentazione; la radiazione
infrarossa che emette è invisibile ma può essere osservata indirettamente ad es.
attraverso la CCD CAMERA di un telefono cellulare, fotocamera digitale,
videocamera ecc;
Il valore di distanza rilevata non è assoluto ma relativo al tipo di oggetto che
ha davanti e si riferisce (approssimativamente) in percentuale alla distanza
massima rilevabile per quel dato oggetto; ad es. uno specchio o un oggetto
chiaro, tipo un foglio di carta bianco, rifletterà più radiazione infrarossa di
uno scuro o di uno trasparente quindi sarà rilevabile a maggior distanza; se ad
es. il sensore da come uscita 127 che corrisponde al 50% della distanza massima
per quell' oggetto che è di 10 cm, si può ritenere che in quel istante esso si
trovi ad una distanza di 5 cm.
Il sensore è dotato di un connettore simile a quelli dei
servomotori,
questo andrà inserito nella
scheda di
controllo utilizzando gli apposti ingressi analogici, negli esempi
si è utilizzato AD(0)
| Caratteristiche | |
| Massima distanza | 15 cm |
| Tensione alimentazione | 5V |
| Dimensioni | 12.9mm x 25.4mm |
| Peso | 7g |
| Lunghezza cavo | 318 mm |
Ringrazio Flix per il testo e i programmi, e Michele per le foto del sensore
 |
 |
Per esempi di utilizzo vedere il fascicolo 54 con il programma OBSTACLEAVOIDANCE.BAS, e il fascicolo n° 67 con il programma PENGUIN_DISTANCE.BAS

|
Programma OBSTACLEAVOIDANCE.BAS
|
Programma PENGUIN_DISTANCE.BAS
|
|
Foto del sensore senza la copertura flessibile
 |
 |
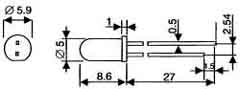
| Esempio diodo emittente ad infrarosso | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del sensore |
| Esempio Fototransistor | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del sensore |


| Elenco revisioni | |
| 07/01/2011 | Aggiornato pagina |
| 24/08/2010 | Aggiunto foto del circuito interno del sensore |
| 07/07/2008 | Emissione preliminare |



