Sensore infrarosso
passivo
PIR
HC-SR501
USO con Arduino
Ultimo aggiornamento 17 marzo 2019
|
|
Sensore infrarosso
passivo Ultimo aggiornamento 17 marzo 2019 |
|
|
|
Indice
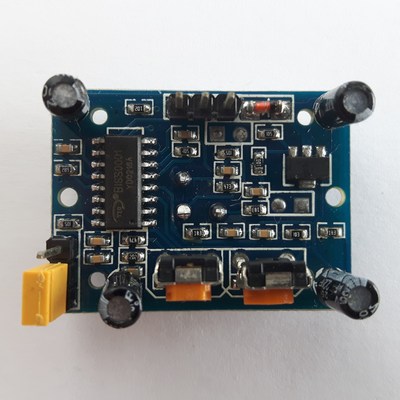
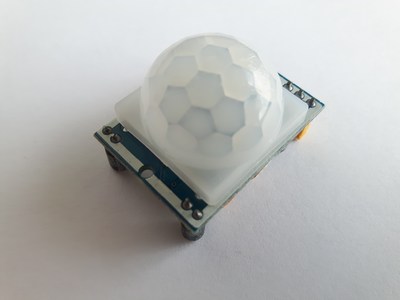
Il sensore utilizzato in questi esempi è il sensore PIR tipo HC-SR501 si presenta come una scheda dalle seguenti dimensioni 33x25mm e di 8g di peso. Questo modulo è un sensore a infrarossi in grado di fornire un segnale alto a 3V quando rileva un corpo caldo in movimento.


 |
 |
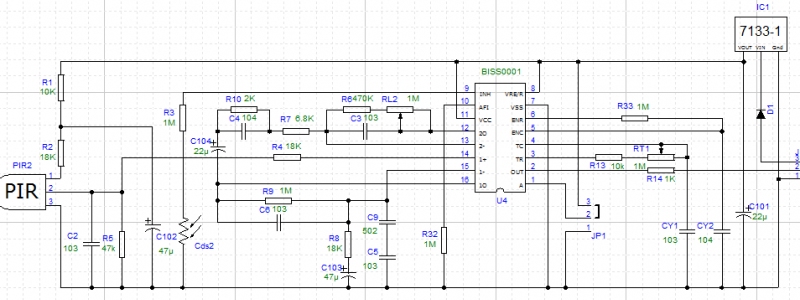
Il modulo comprende un sensore passivo piroelettrico (PIR), e un integrato
BISS0001 (integrato U4) per l’interfaccia, l'alimentazione è regolata al
valore di 3,3V tramite apposito regolatore (IC1), ed è presente un diodo (D1) a
protezione dell'inversione di polarità.
Sulla scheda del sensore
HC-SR501 sono presenti due trimmer,
uno regola la
sensibilità e l'altro tempi di uscita.
Per quanto riguarda la sensibilità avremo che ruotando in senso orario => Alta
sensibilità, mentre in senso antiorario => bassa sensibilità (intervallo
compreso tra 3-7 m).
Per i tempi di uscita, in senso orario => lungo, antiorario => corto (intervallo
compreso tra 3-300 sec)
Sul connettore d'uscita, abbiamo il polo di alimentazione Vcc (+ 5-20V), quello
centrale è il pin d'uscita del segnale, mentre l'ultimo rappresenta il terminale
di massa.
L'uscita è alta (3,3 V) o bassa (0 V
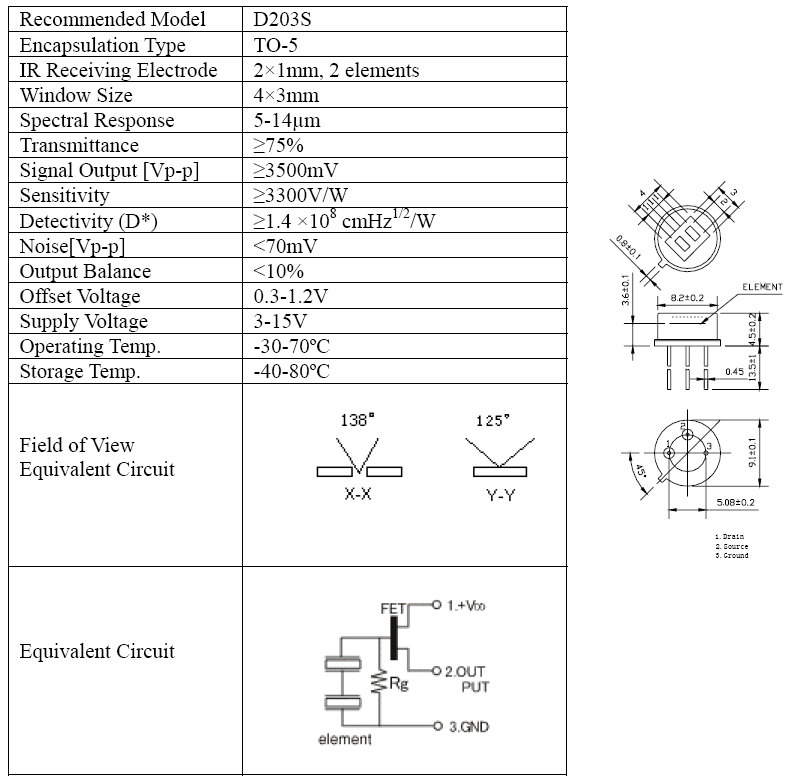
Tensione di alimentazione: da 4,5Vdc a 20Vdc
Tensione di uscita: 0-3,3V
Corrente di uscita: 10mA
Angolo di visione: <140°
Distanza di rilevamento: da 3 a 7 mt


Il sensore di movimento PIR
HC-SR501 è uno dei più facili da collegarsi ad un Arduino o a qualsiasi altro
microcontrollore, tra l'altro può essere utilizzato anche come un rilevatore di
movimento autonomo.
Si possono trovare due versioni della scheda. Uno con un jumper a 3 poli ed uno
con piazzole di saldatura invece di un ponticello. Se il ponticello è messo
nella sua posizione inferiore (con la scheda ancora di fronte, come descritto)
non vi è alcun ripristino. Se è nella sua posizione superiore (H) è in modalità
ripristino automatico. Se è impostato su auto-reset il segnale del sensore
rimarrà alto fino a quando il movimento si arresta. Dopo, se non viene rilevato
un movimento l'uscita diminuirà.
Se impostato su Nessun ripristino (L) del sensore di rilevamento si ferma una
volta che ha innescato, e l'uscita rimane alta per il periodo di tempo prestabilito.
Per scegliere una di queste impostazioni, è sufficiente creare una
saldatura-ponte tra il pad con l'etichetta e il pad in mezzo. il default è 'L'
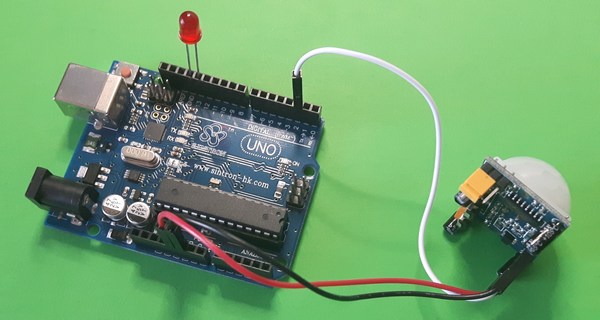
Per testare il sensore HC-SR501 sono presentati alcuni esempi: Rilevazione di oggetto in movimento , Semplice sistema di allarme
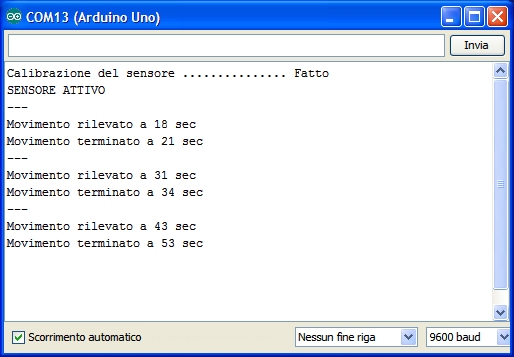
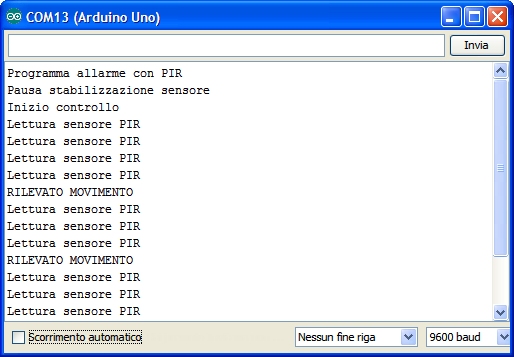
Il primo esempio mostra la semplice
attivazione del sensore con accensione di un led. Tramite il monitor
seriale viene mostrato il tempo di attivazione del sensore.
Sono necessari i seguenti componenti
| Arduino UNO | Sensore PIR HC-SR501 | Diodo led |
 |
|
 |
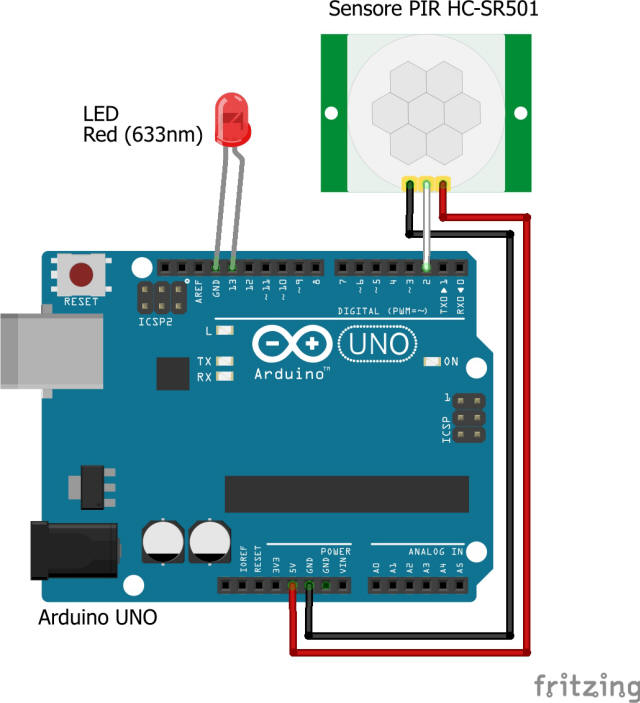
![]()
Programma test_sensore_pir.ino
|
Il secondo esempio rappresenta un'elementare sistema di allarme. Sono necessari i seguenti componenti
| Arduino UNO | Sensore PIR HC-SR501 | KY-019 5V relay module |
|
|
|
 |
| KY-006 Small passive buzzer module | Diodo led | |
 |
|
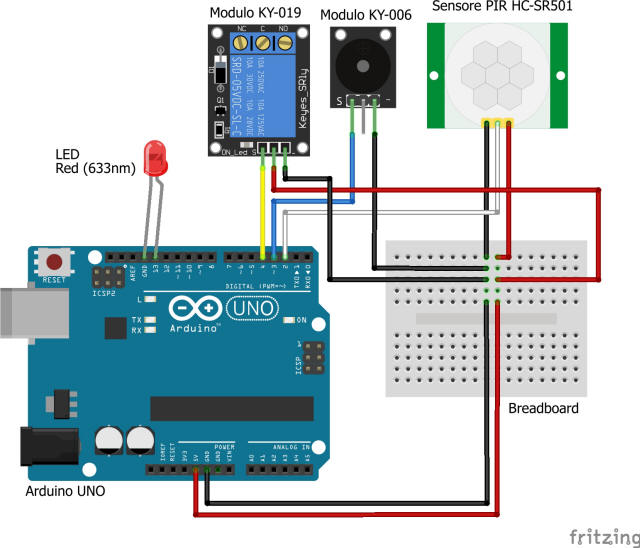
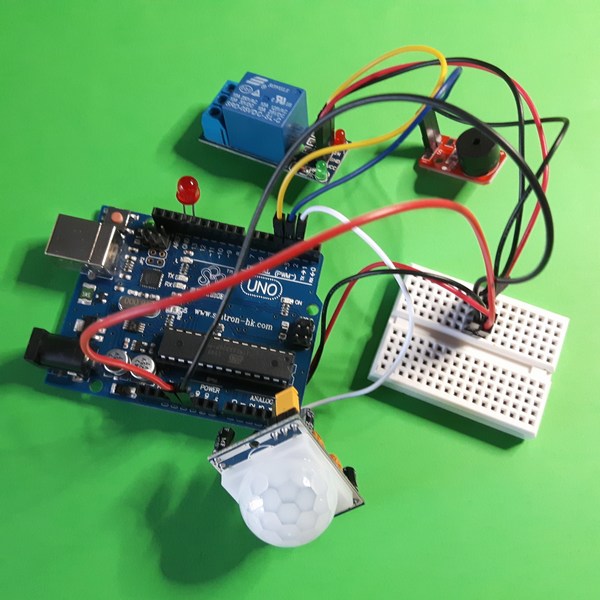
Esempio di utilizzo fatto dall'amico Cristiano Rossi
![]()
Programma allarme_pir_HC-SR501
|
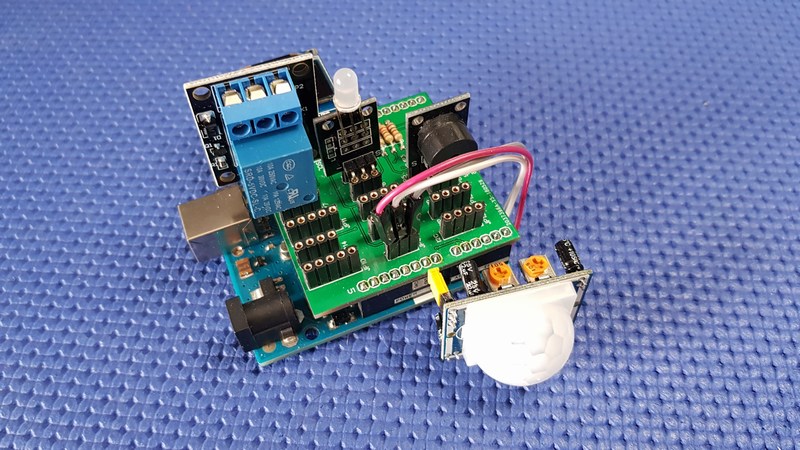
| Arduino UNO | Multi test Shield | Sensore PIR HC-SR501 |
|
|
|
|
| KY-006 Small passive buzzer module | KY-011 2 color LED module | KY-019 5V relay module |
|
|
 |
|
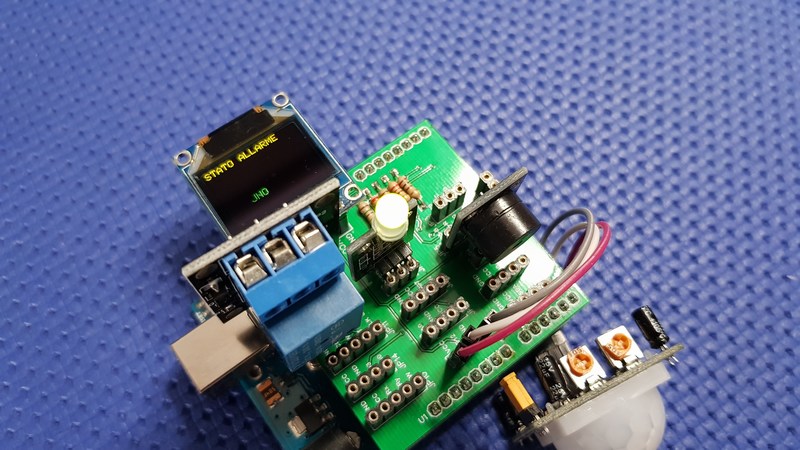
Il Multi Test Shield è uno shield auto
costruito realizzato per testare la serie di sensori contenuti nella confezione
"37
in 1 Sensor Module Board Set" compatibile con la scheda Arduino UNO R3
originale e relativi cloni.
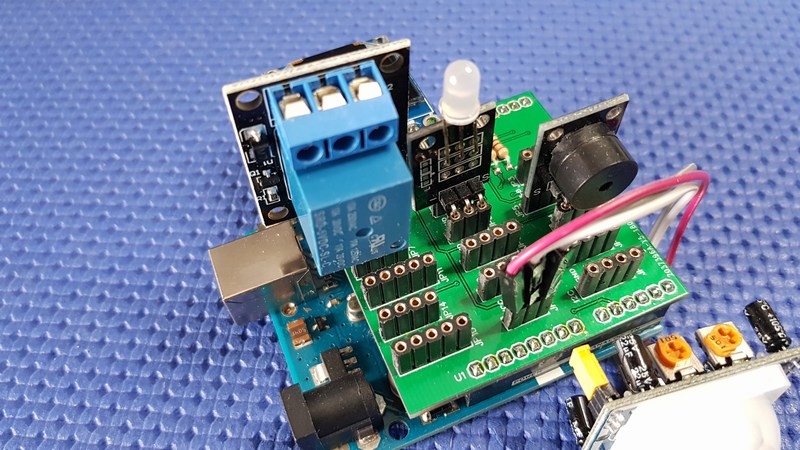
Sulla scheda sono disponibili molti connettori che risultano già opportunamente
collegati con le porte digitali o analogiche di Arduino.
In realtà, la scheda, oltre ai sensori presenti nel kit "37 in 1 Sensor
Module Board Set" permette di testare altri sensori, servo, ecc per un
totale di oltre 50 tipi, la presenza di un connettore bus I2C espande
ulteriormente la tipologia di dispositivi che lo shield permette.
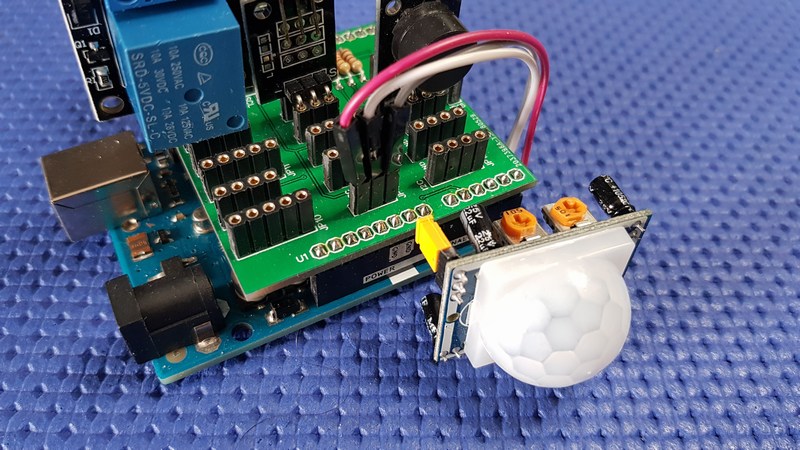
Sulla scheda è anche presente un connettore per il collegamento di un piccolo
Display OLED da 0.95"risoluzione 96x64 pixel, 65536 Colori, su di esso
potranno essere mostrati dei messaggio o i valori misurati dai sensori.

Per l'utilizzo occorrerà semplicemente posizionare i vari componenti e in particolare
|
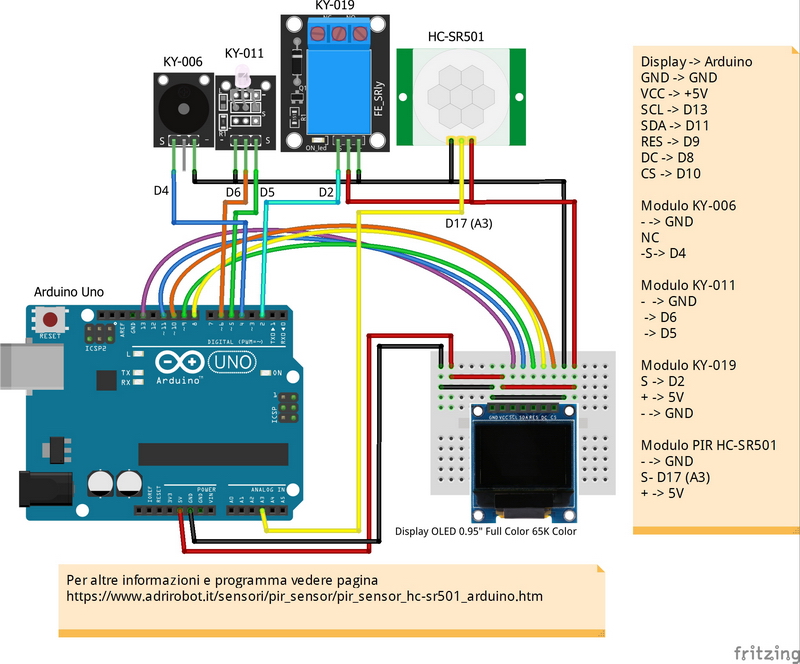
Schema equivalente
|
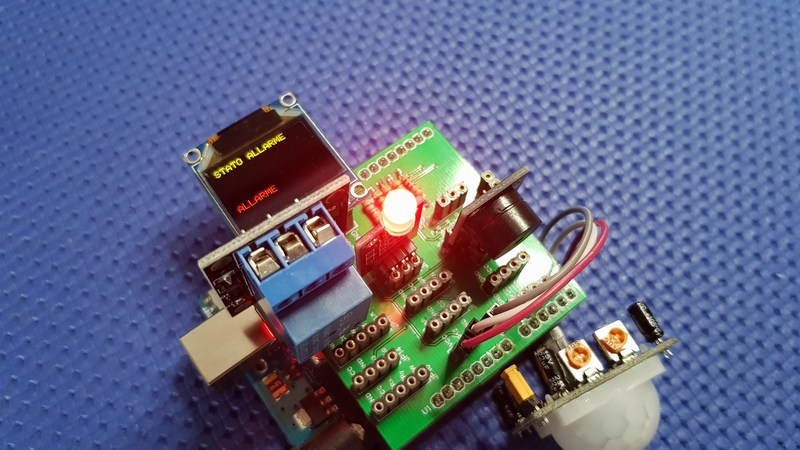
Il programma accenderà in sequenza i tre led interni
rosso, blu, verde in sequenza e poi simultaneamente per l'emissione della luce
bianca.
Mostrerà sul display OLED le varie fasi di esecuzione del programma





Programma
![]()
allarme_pir_HC-SR501_SHIELD.ino
|
| Elenco revisioni | |
|
17/03/2019 |
Inserito versione del sistema di allarme con PIR non utilizzo Multitest shield |
|
10/03/2019 |
Modificato programma, inserito filmato realizzato da Cristiano Rossi |
|
14/09/2016 |
Emissione preliminare |

