Braccio Robotico MeArm
ultimo aggiornamento 17 giugno 2022
|
|
Braccio Robotico MeArm ultimo aggiornamento 17 giugno 2022 |
|
|
|
Indice
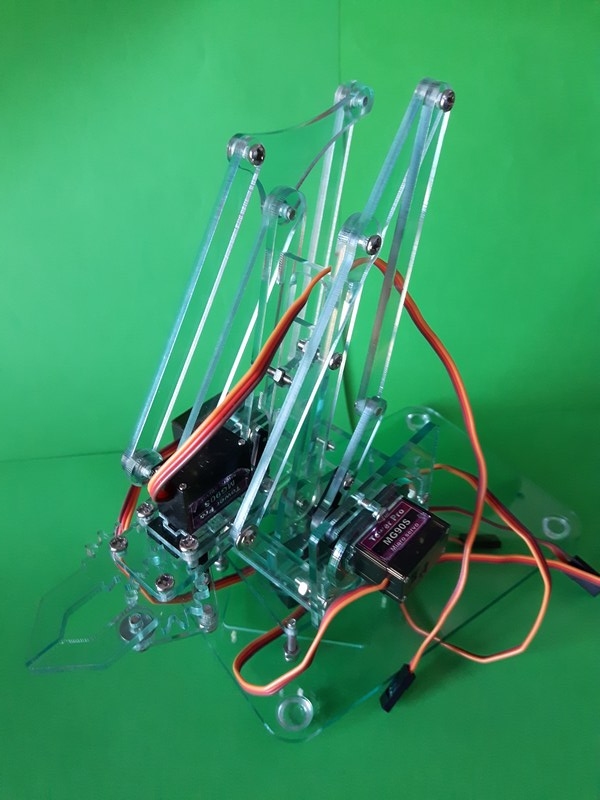
Il kit illustrato MeArm, rappresenta un
semplice braccio robotico open source a basso costo che permette
l'introduzione alla robotica industriale e ai concetti di controllo del
movimento
Si tratta di un braccio robot tascabile. Il progetto iniziale risale al
febbraio 2014, e grazie al fatto che il progetto è aperto, questo ha
portato a migliorarlo, quello che viene mostrato è la versione 0.4.
La pubblicazione delle istruzioni di montaggio per la versione 0.3
pubblicata su Instructables nell'aprile 2014 ha portato all'espansione
dei modelli costruiti in tutto il mondo, dalla sua sede nel Regno Unito
agli Stati Uniti, Messico, Svizzera e Giappone, per citarne solo alcuni.
Attualmente c'è un codice disponibile per Arduino, Raspberry Pi,
Beaglebone Black ed Espruino.
Le istruzioni, originali possono essere scaricarlo qui:
Mini Pocket-Sized-Robot-Arm.pdf
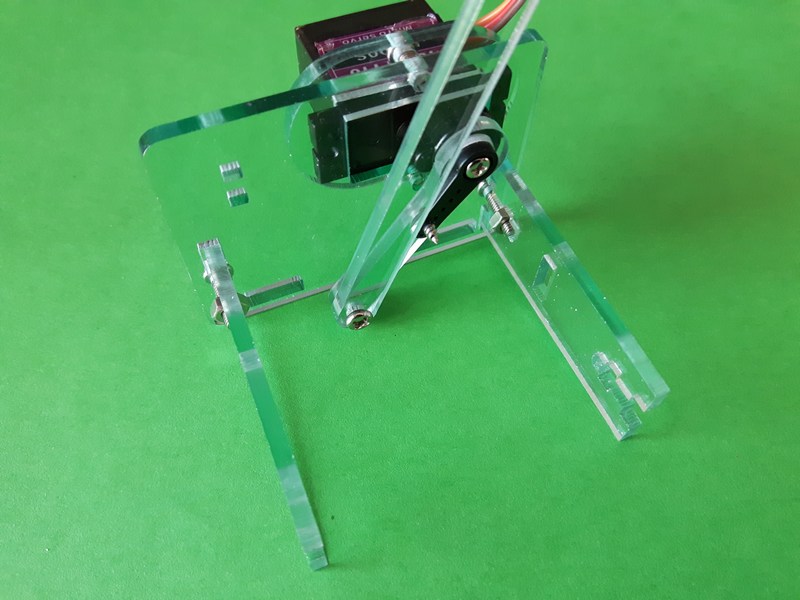
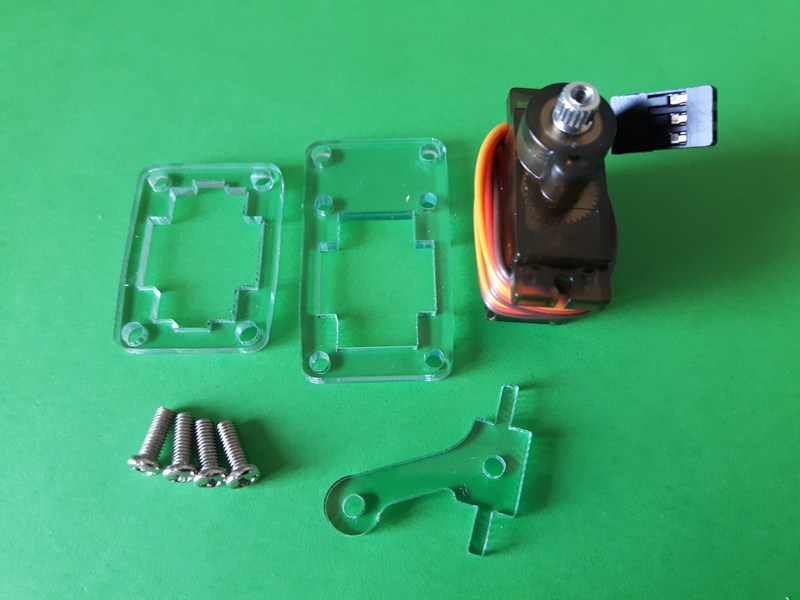
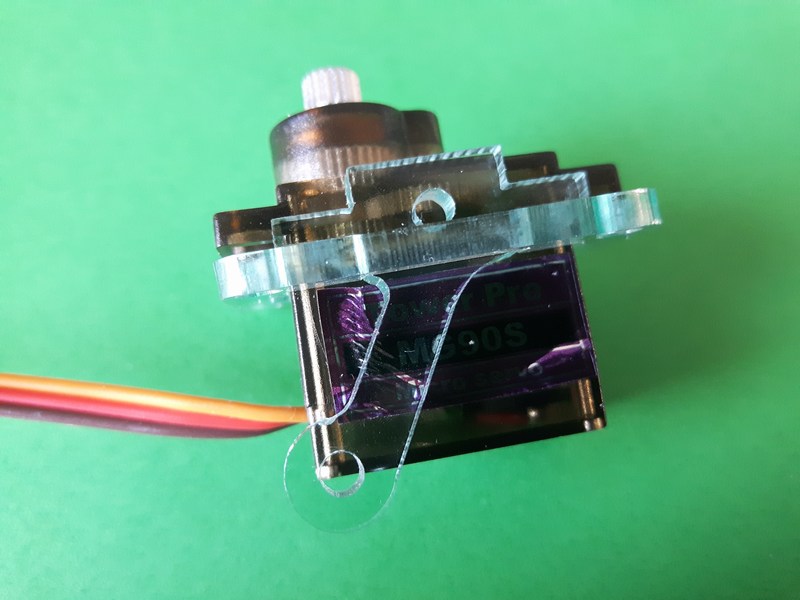
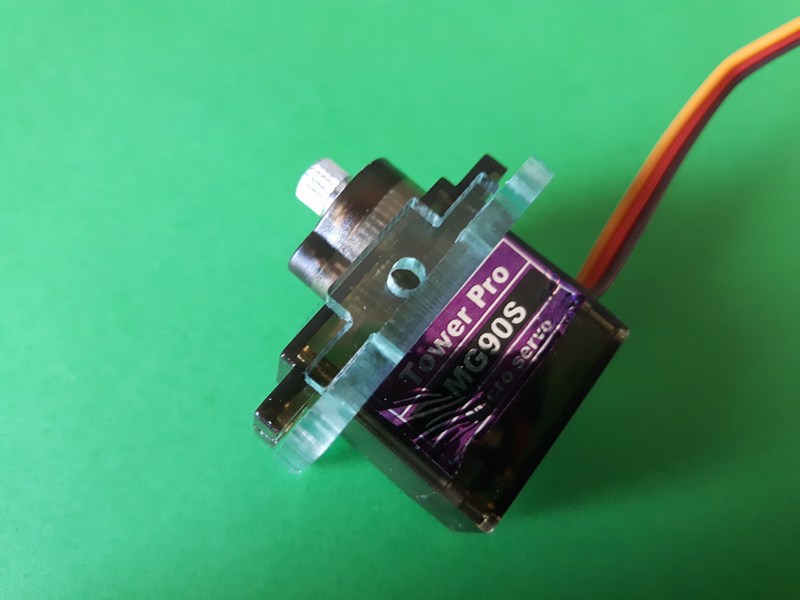
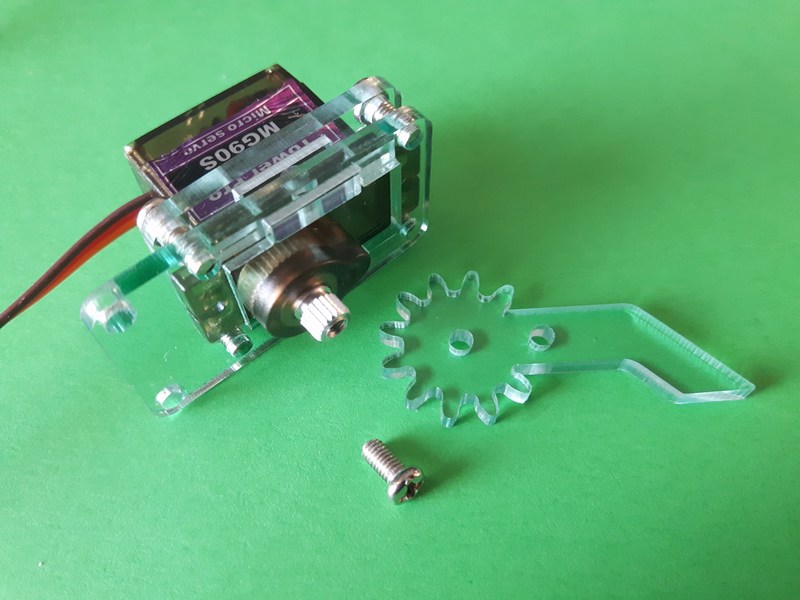
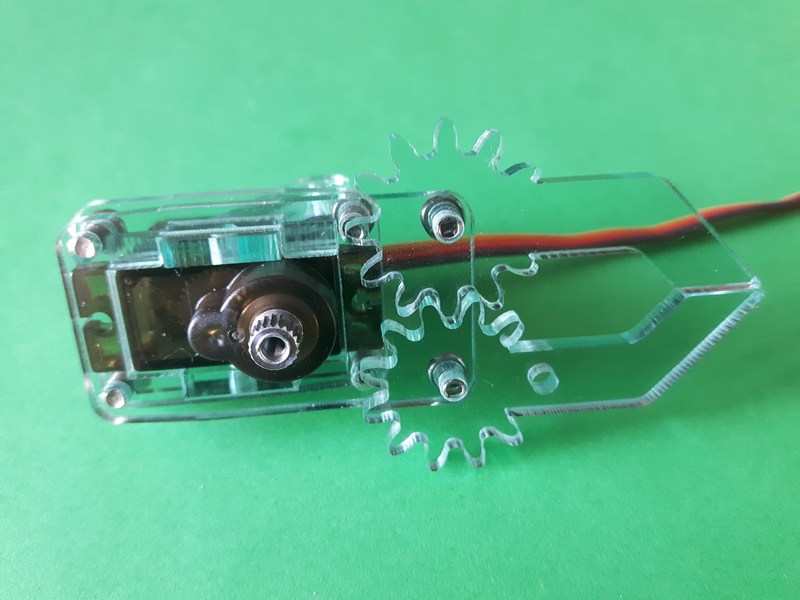
Nota: Il kit viene fornito con servo con ingranaggi in plastica tipo TowerPro SG90 9g, che conviene sostituire con la versione con ingranaggi in metallo, servo tipo TowerPro MG90

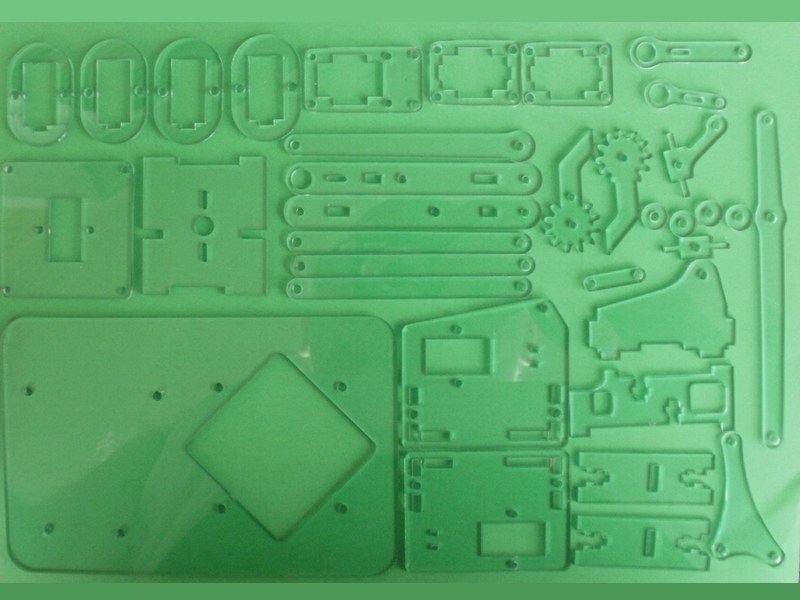
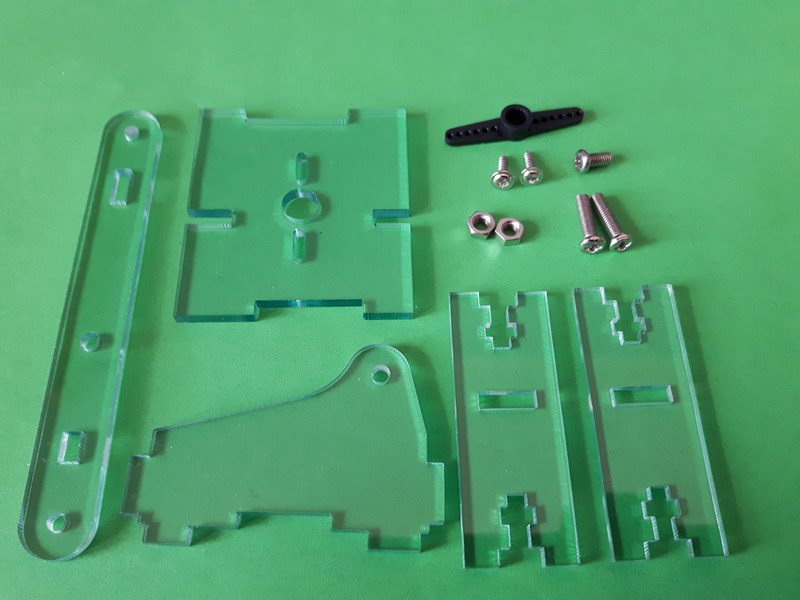
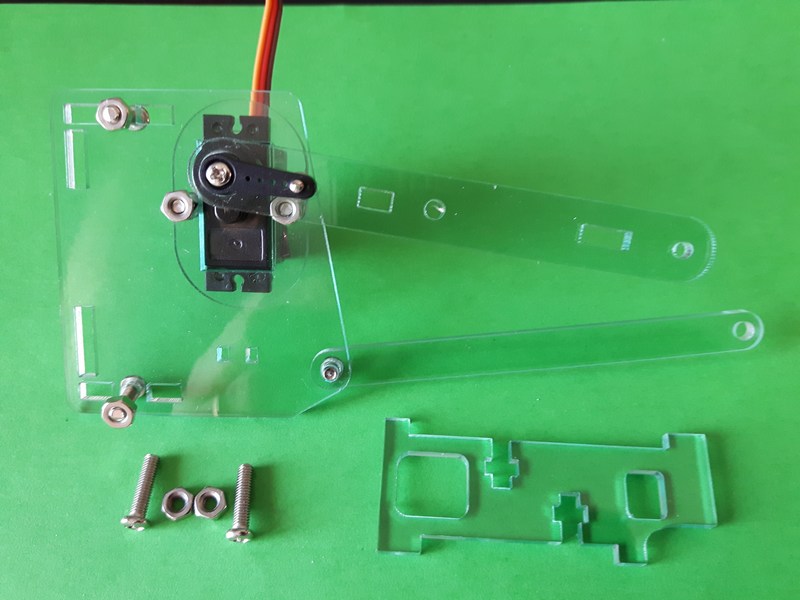
Il modello montato è venduto dalla SINTRON tramite Amazon, la confezione contiene:
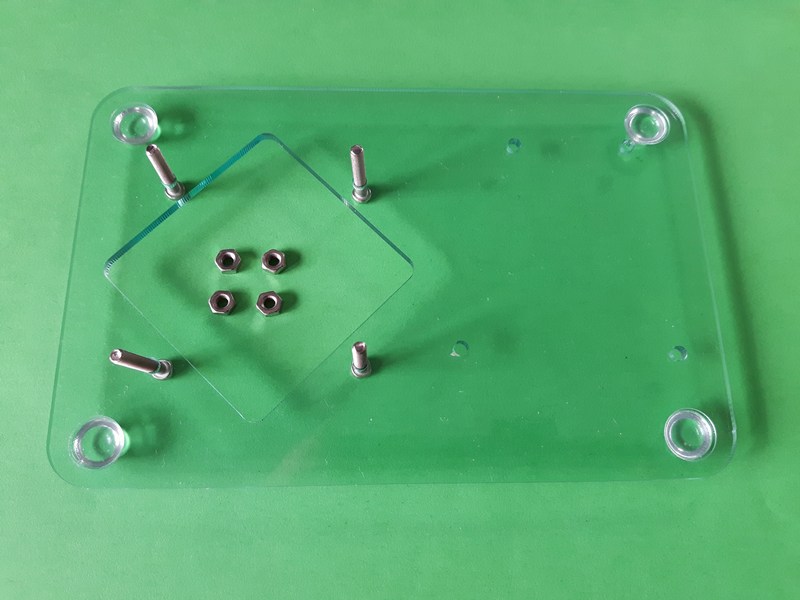
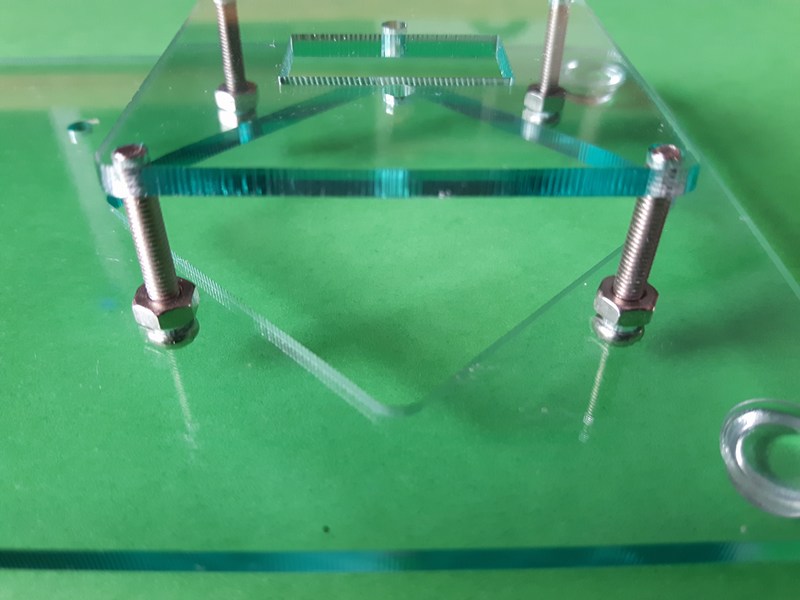
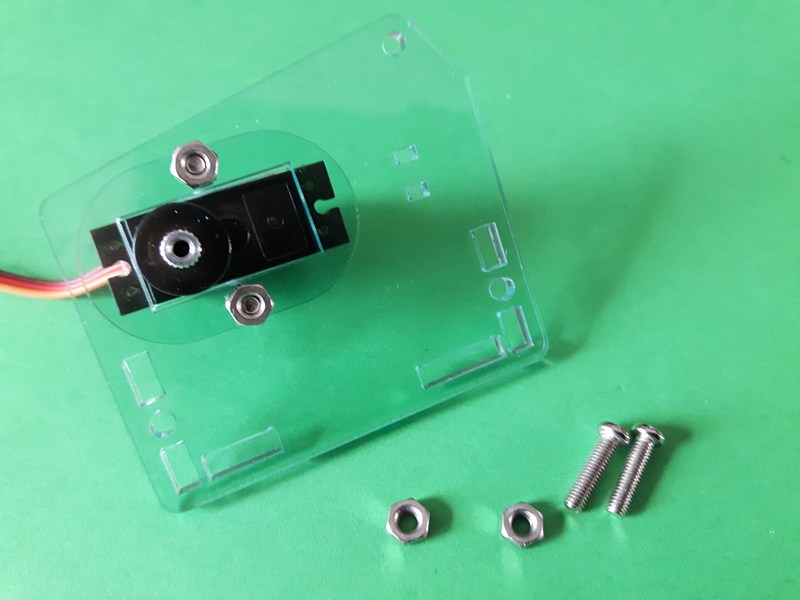
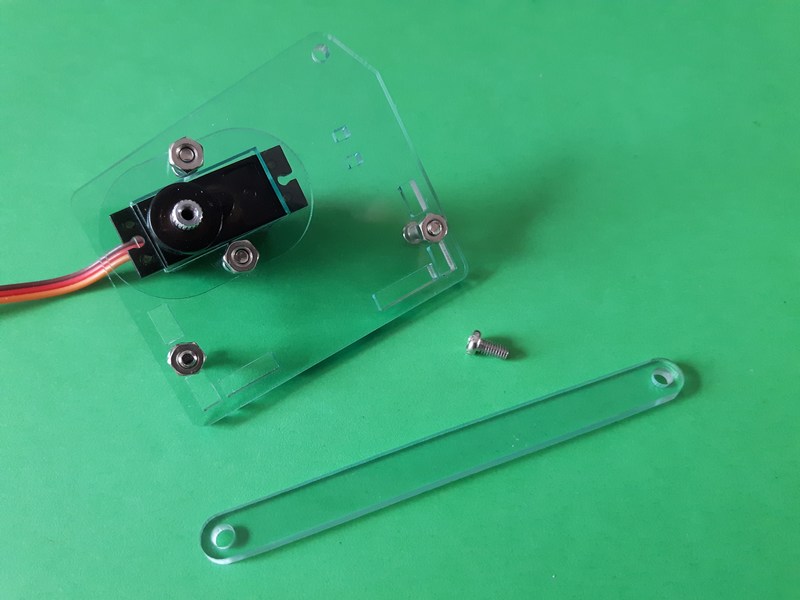
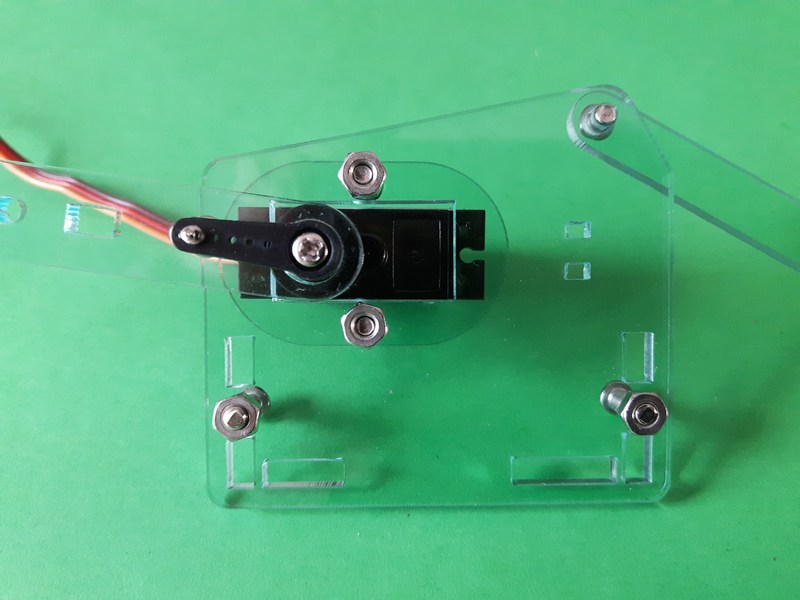
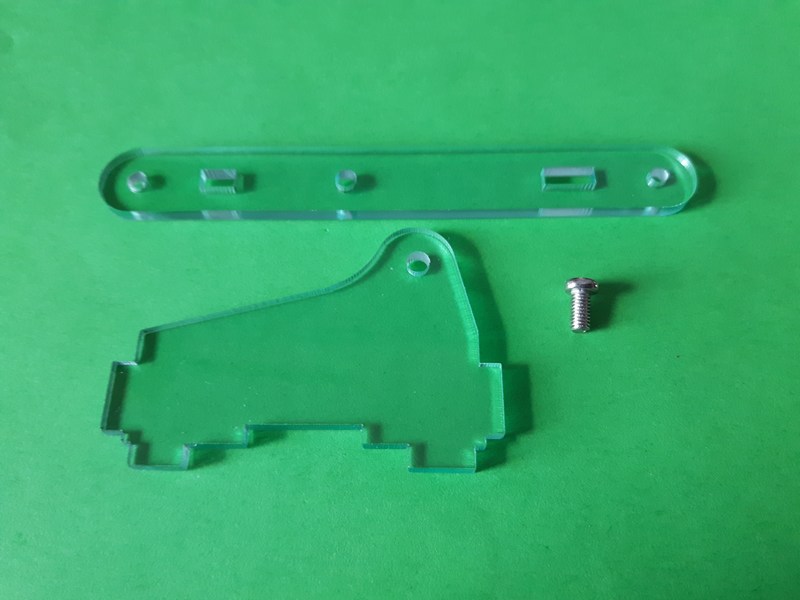
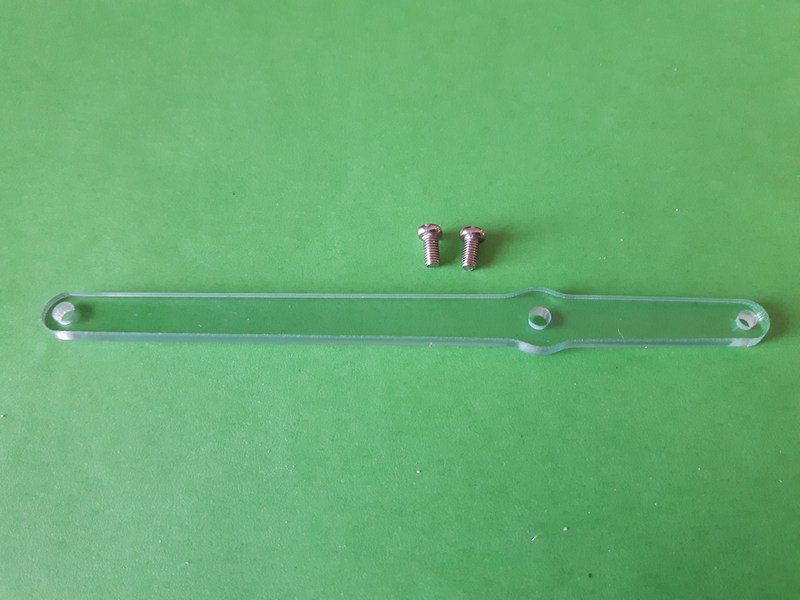
1 kit robot, i particolari sono in plastica acrilica (viti e dadi sono inclusi)
4 x Micro Servo TowerPro SG90 9g
1 x scheda Arduino UNO R3 Sintron (con cavo USB)
2 x moduli joystick
1 breadboard 830 punti
1 x cavo Dupont (1 set)
![]()
|
||||||||||||||||
 |
 |
|
| Modello | MG90S | SG90 |
| Ingranaggi | In metallo | In plastica |
| Tensione di esercizio | 4.8V~ 6.6V | 4.8 v |
| Intervallo di temperatura: | 0 ℃ _ 55 ℃ | 0 ℃ _ 55 ℃ |
| Larghezza banda morta: | 1us | 1us |
| Lunghezza cavo | 25 cm | 25 cm |
| Peso(g) | 13.4 | 9 |
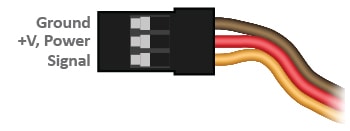
| Connettore | JR | JR |
| Coppia(kg/cm)(4.8v) | 1.8 | 1.8 |
| Coppia(kg/cm)(6,6v) | 2.2 | |
| Velocità(sec/60deg) | 0.1 | 0.1 |
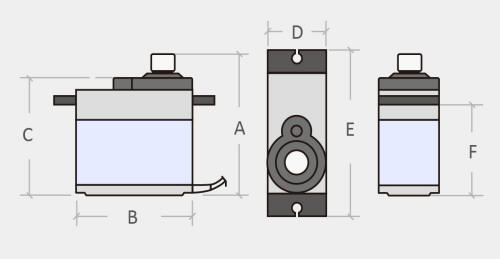
| A(mm) | 32.5 | 34.5 |
| B(mm) | 22.8 | 22.8 |
| C(mm) | 28.4 | 26.7 |
| D(mm) | 12.4 | 12.6 |
| E(mm) | 32.1 | 32.5 |
| F(mm) | 18.5 | 16 |
Tabella misure
Connettore JR
|
|||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Elenco revisioni |
|
|
17/06/2022 |
Aggiornato pagina |
|
01/01/2018 |
Emissione preliminare |