



ultimo aggiornamento 9 novembre 2006
|
|
|
ultimo aggiornamento 9 novembre 2006 |
|
|
|
| Per l'alimentazione del
robot
Goldrake ho pensato di sostituire l'attuale alimentazione del robot, fatta da 4 batterie
da 1,5V con una batteria da 12V-1,2 Ah ermetica ricaricabile al piombo. Ora per avere le tensioni necessarie ad alimentare le varie parte del robot e cioè:
|
|
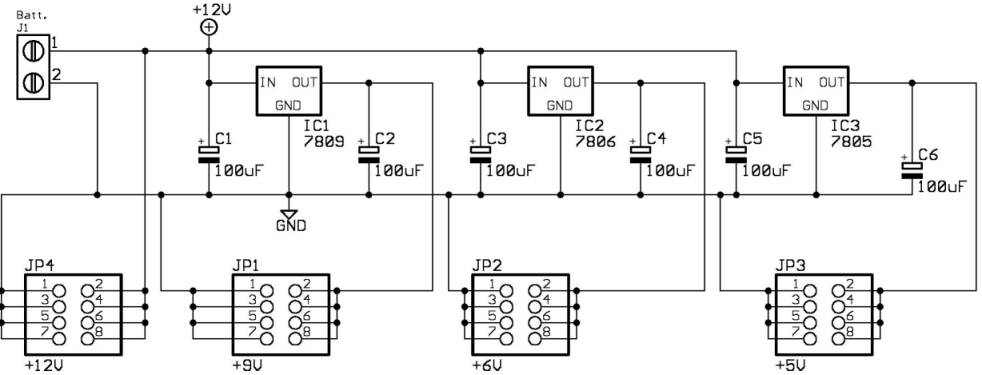
è necessario l'utilizzo di
un' apposito circuito formato principalmente da 3 circuiti integrati che si occupano di
ridurre la tensione in entrata nelle varie tensioni d'uscita, e cioè 9, 6, 5 Volt, più
la tensione di 12V prelevata direttamente dalla batteria.
Sono previsti dei condensatori di livellamento e 5 morsettiere una per il collegamento
della batteria e 4 morsettiere da cui prelevare le varie tensioni di uscita.
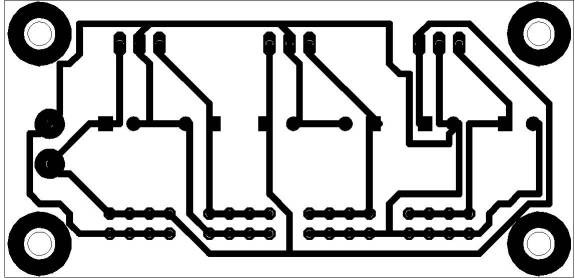
Per tale circuito ho previsto un' apposito circuito stampato, ma nulla vieta di utilizzare
una basetta mille fori.
Nel montaggio non dimenticare di dotare gli integrati di un'aletta di raffreddamento per
la dissipazione del calore generato.
Per la ricarica della batteria è possibile utilizzare un
circuito in scatola di
montaggio oppure uno
autocostruito.



|
Tabella con risultati del collaudo |
|
| Tensione teorica | Tensione rilevata |
| Morsettiera J1 (batteria) - 12V | 12,4 |
| Morsettiera JP4 - 12 V | 12,38 |
| Morsettiera JP1 - 9 V | 8,88 |
| Morsettiera JP2 - 6 V | 5,96 |
| Morsettiera JP3 - 5 V | 4,95 |
Schema elettrico dell'alimentatore multitensione
 |
Documentazione in formato PDF
|
||||||||||||||
| LM 78XX Regolatore di tensione | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
 |
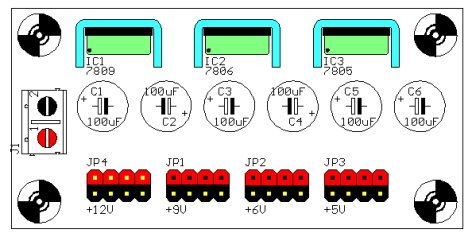 |
| Circuito stampato lato rame | Circuito stampato lato componenti |
| Elenco revisioni: | |
| 09/11/2006 | Aggiornato grafica pagina |
| 16/02/2004 | Aggiornato pagina |
| 21/06/2003 | Emissione preliminare |


