ARDUINO
I/O Expansion
Shield V4
ultimo aggiornamento 17 agosto 2011
|
|
ARDUINO ultimo aggiornamento 17 agosto 2011 |
|
|
|
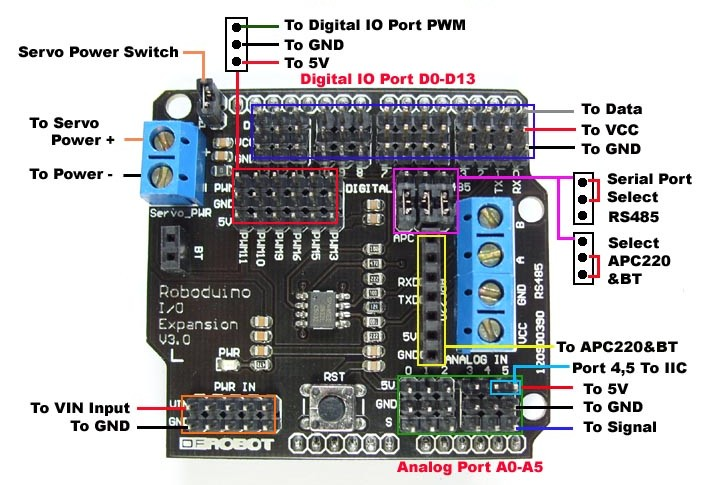
La scheda DFRobot I/O Expansion
Shield V4 permette l'espansione della
scheda Arduino
offrendo un metodo semplice per collegare sensori, servomotori, ect
Sono disponibili i collegamenti agli ingressi dgitali I / O e pin di ingresso
analogico con relativo terminale di alimentazione e GND.
Fornisce inoltre un collegamento separato ai pin PWM, compatibili con il
connettore servo standard.
Un'altra caratteristica è che la scheda dispone di un convertitore RS485 che
permette ad Arduino di comunicazione con dispositivi RS485.
Il connettore di comunicazione fornisce un modo estremamente semplice per
collegare un modulo wireless come APC220 Radio Data Module (SKU: TEL0005) e
DF-BluetoothV3 modulo Bluetooth (SKU: TEL0026).
E' dotato di un ingresso singolo di alimentazione per Servi. Un ponticello di
alimentazione del servo consente agli utenti di selezionare come alimentazione
per i servo quella interna o quella esterna.


Specifiche
Supporto RS485
Supporto Bluetooth
Supporto APC220
Supporto SD card lettura / scrittura
L'interfaccia RS485
Il bus di collegamento RS485 è generalmente formato da un cavo con due conduttori attorcigliati (twisted-pair) e una schermatura che collega i vari dispositivi.
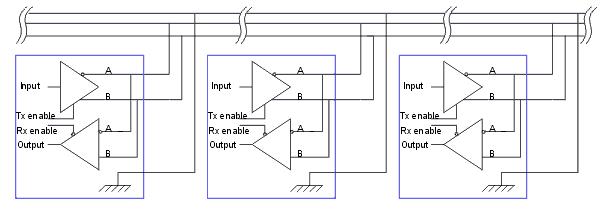
Un bus formato da due soli fili è un bus detto half-duplex nulla toglie
di raddoppiare il bus portandolo a quattro fili e ottenendo così un bus
full-duplex.
Un buon bus RS485 lo si ottiene restando tra i 400 e i 500m di lunghezza
massima. Ovviamente riducendo la velocità del bus è possibile arrivare
anche a 1200m.
Poiché i moduli collegati sulla rete risentono anche notevolmente delle
differenze di massa che si vengono a creare, soprattutto su reti molto
lunghe, è consigliabile usare degli accoppiatori RS485 separati
galvanicamente.
La trasmissione e del tipo differenziale ovvero il segnale è il
risultato della differenza tra le tensioni dei due fili che compongono
il bus
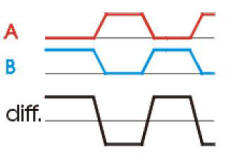
I trasmettitori RS485 mettono a disposizione (sotto carico) un livello
in uscita di ±2 V tra le uscite A e B, i ricevitori riconoscono livelli
di ±200 mV ancora come segnale valido.
Questa tecnica permette un'ottima immunità ai disturbi anche su tratte
di cavo molto lunghe.
Tipicamente la sezione del cavo può essere di 24 o 22 AWG per medie
distanze, e dovrà essere aumentata nel caso di lunghe tratte.
Per minimizzare le riflessioni, il primo e l'ultimo dispositivo della
rete devono avere una resistenza terminatrice collegata in parallelo
alla linea.
L'opzione sopra non è vera nel caso la linea sia fatta a stella per cui
la posizione della resistenza di terminazione andrà provata
sperimentalmente.
In questo tipo di rete, peraltro molto rara, si mette una resistenza di
terminazione sul centro stella e la seconda resistenza sul nodo più
lontano dal centro stella.
Lo standard RS485 teoricamente può supportare fino a 32 dispositivi
connessi sul bus (con i moderni 485 si arriva tranquillamente a 128 nodi
e con alcuni 485 particolari e per questo costosi si arriva sino a 256
nodi).
Tipicamente è necessario usare resistenze di terminazione il cui valore
varia da 120 a 560 ohm, si veda più avanti le spiegazioni su come
scegliere le resistenze di terminazione.
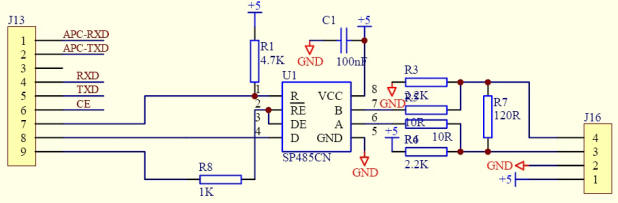
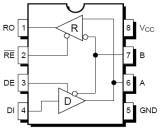
| SP485CN Low Power Half-Duplex RS-485 Transceivers | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
Pin# |
Name |
Description |
|
1 |
RO |
Receiver Output. |
|
2 |
RE |
Receiver Output Enable Active LOW. |
|
3 |
DE |
Driver Output Enable - Active HIGH. |
|
4 |
DI |
Driver Input. |
|
5 |
GND |
Ground Connection. |
|
6 |
A |
Driver Output/Receiver Input - Non-inverting. |
|
7 |
B |
Driver Output/Receiver Input - Inverting. |
|
8 |
Vcc |
Positive Supply 4.75V<Vcc< 5.25V. |
| Elenco revisioni | |
| 17/08/2011 | Emissione preliminare |

