CNC SHIELD V3 A4988 Controller
ultimo aggiornamento 21 ottobre 2018
|
|
CNC SHIELD V3 A4988 Controller ultimo aggiornamento 21 ottobre 2018 |
|
|
|
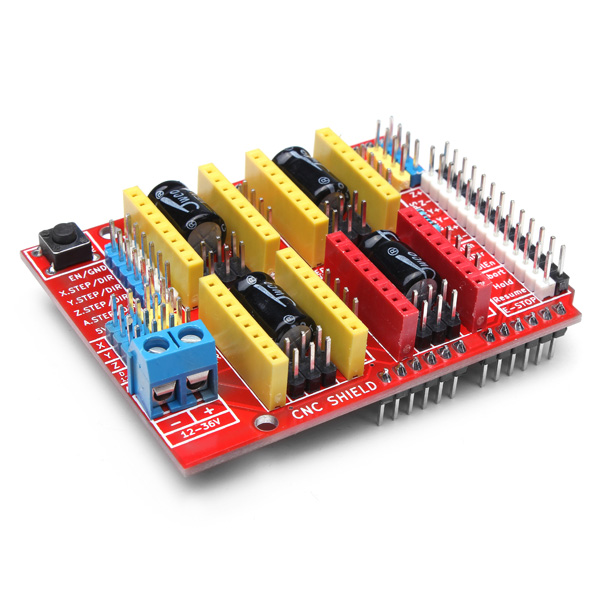
Quello qui presentato è uno shield per Arduino denominato CNC SHIELD, negli esempi è utilizzato il modello nella versione V3.0, ma è già disponibile il modello revisione V3.1. Viene utilizzata di solito per realizzare piccole macchina CNC o 3D printer, lo Shield permette di gestire tre moduli comando motori che possono essere i driver A4988 e DRV8825.
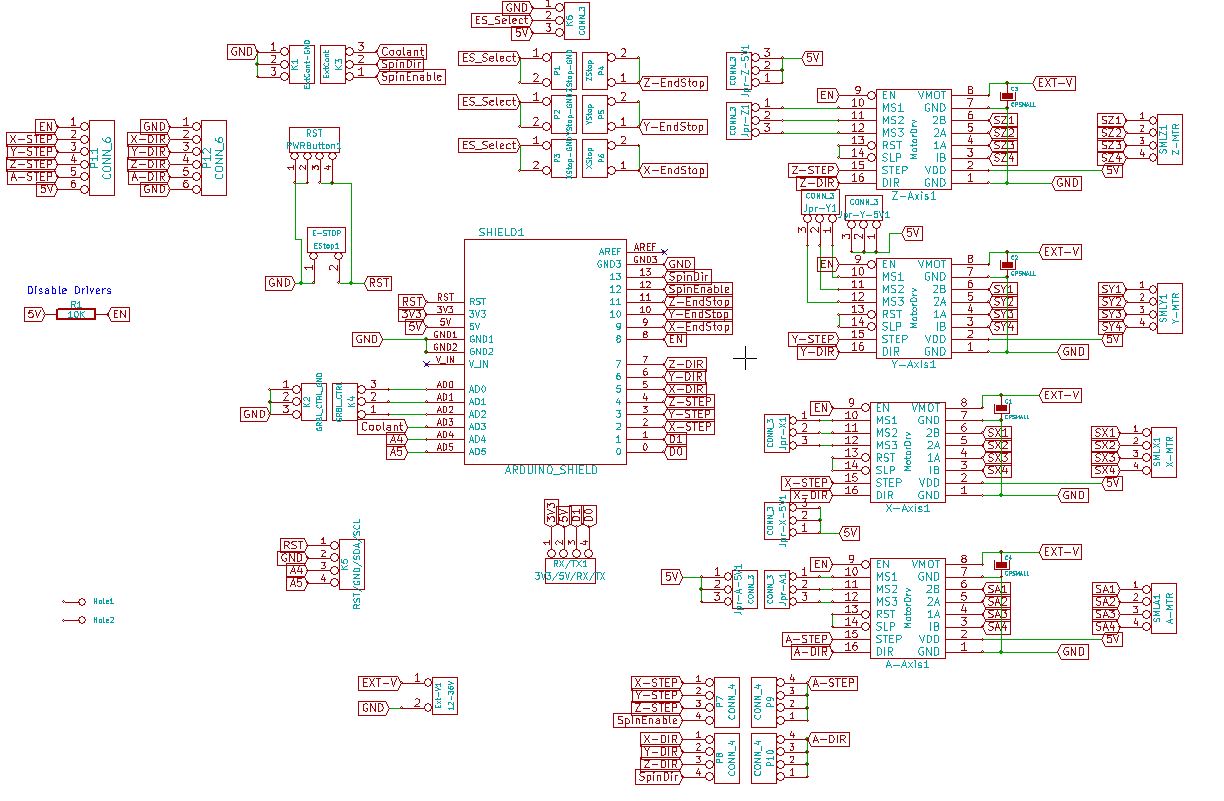
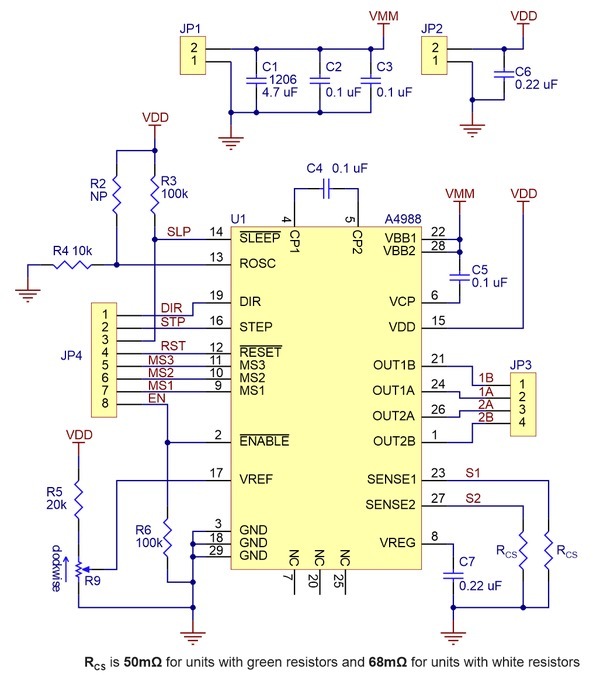
Schema elettrico della scheda CNC SHIELD versione 3.0

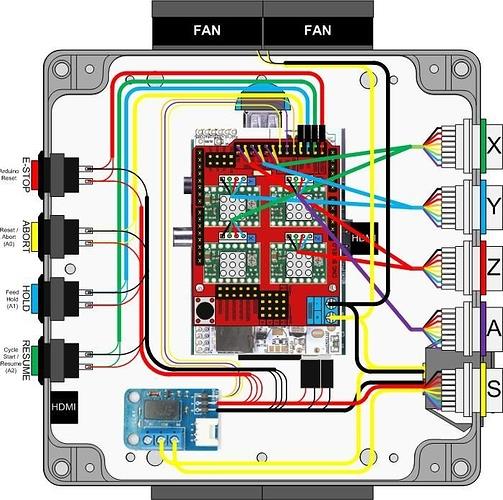
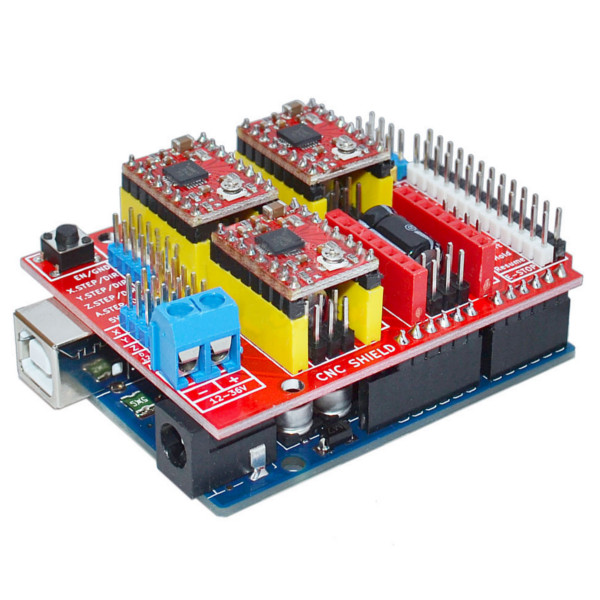
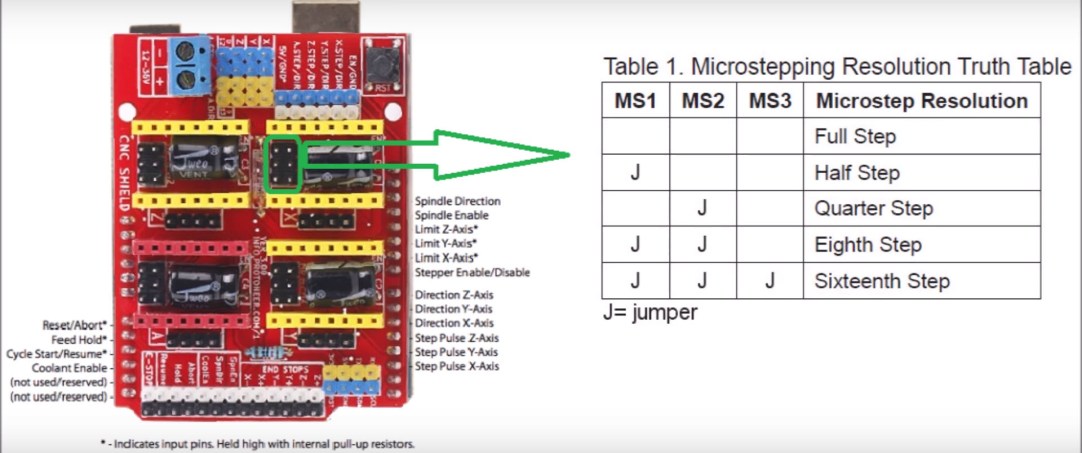
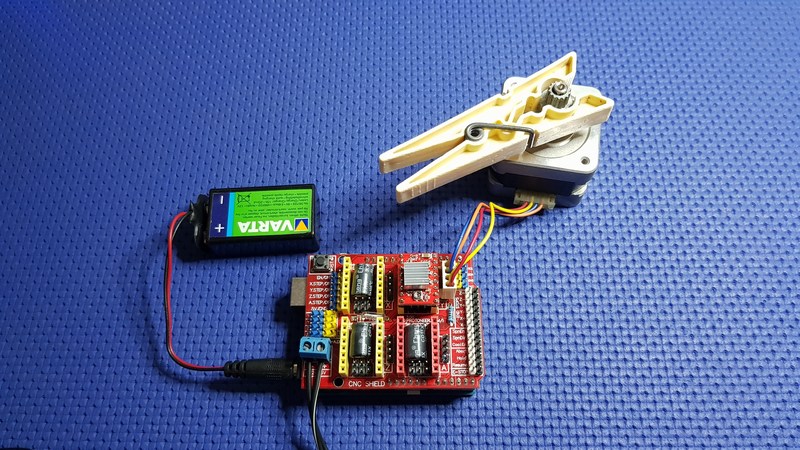
Esempio di utilizzo della scheda
Lo shield è venduto da Futura Elettronica con
codice
8300-CNCSHIELD. Il costo si aggira sui 5€
NOTA: nella vendita non sono compresi i moduli che devono essere
acquistati parte, in questo caso i driver basati sul chip A4988 della
Allegro li troverete a
questo link , mentre i driver basati sul chip
DRV8825 della Texas Instruments, li troverete a
questo link.
![]()
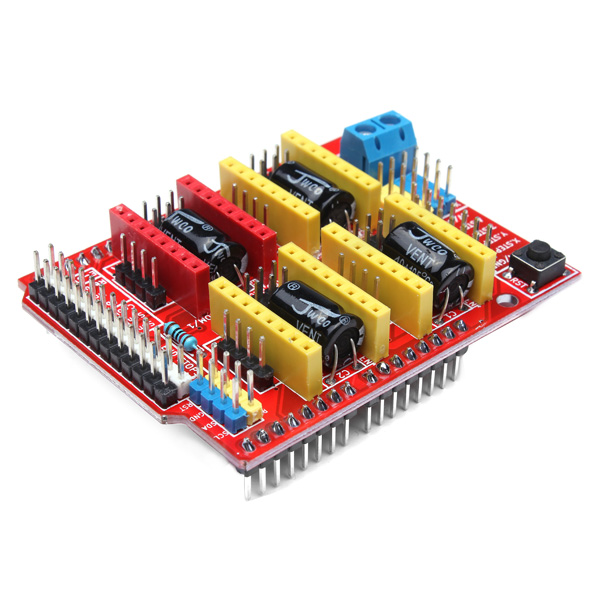
CNC shield V3
Compatibile con GRBL 0.8c. (Firmware open source che gira su un Arduino UNO che trasforma i comandi del codice G in segnali stepper https://github.com/grbl/grbl )
Supporto a 4 assi (X, Y, Z, A-Can duplicare X, Y, Z o fare un 4 ° asse completo con firmware personalizzato usando i pin D12 e D13)
2 x arresti finali per ciascun asse (6 in totale)
Abilitazione e direzione del mandrino
Abilitazione del refrigerante
Utilizza driver passo-passo compatibili Pololu A4988 rimovibili. (o DRV8825)
Ponticelli per impostare il
Micro-Stepping per i driver passo-passo. (max 1/16)
(La scheda DRV8825 può fare fino a 1/32 micro-stepping)
I motori passo-passo possono essere collegati con connettori molex a 4 pin.
Funziona a 12-24V DC. (Solo il Pololu DRV8825 si possono gestire motori con tensione fino a 36 V)
Dimensioni 68x53x12mm
|
||||||||||||||||||||||||||||||
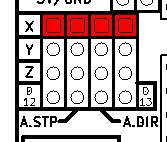
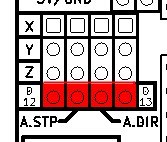
Utilizzando due ponticelli, è possibile configurare il 4° asse per clonare l'asse X o Y o Z. Può anche funzionare come un singolo asse utilizzando il pin digitale 12 per il segnale di guida e il pin digitale 13 come segnale di direzione. (GRBL supporta solo 3 assi al momento)
| Clona X-Axis al quarto driver stepper
(contrassegnato come A)
|
Clona Y-Axis al 4 ° driver passo passo (contrassegnato come A)
|
|
Clona Z-Axis al 4 ° driver passo passo (contrassegnato come A)
|
Usa D12 e D13 per pilotare il quarto driver stepper (contrassegnato come A)
|
Per impostazione predefinita, GRBL è configurato per attivare un avviso se un fine corsa si abbassa (viene collegato a massa). Sui forum questo è stato molto dibattuto e alcune persone hanno richiesto di avere degli arresti high-end attivi. I ponticelli nella foto offrono l'opzione per fare entrambe le cose. (Per eseguire l'impostazione predefinita su GRBL, il ponticello deve essere collegato come lo scudo sinistro nell'immagine in basso) (Questo jumper è stato introdotto solo nella versione 3.02)
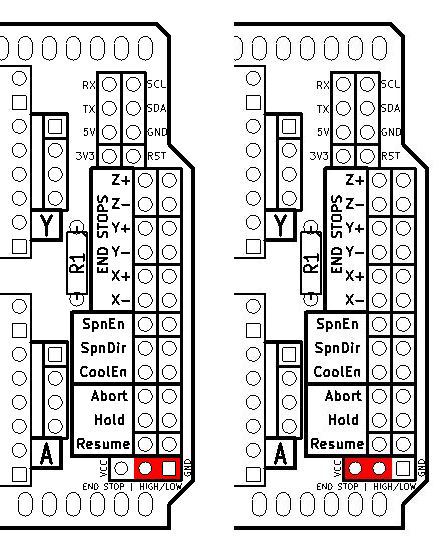
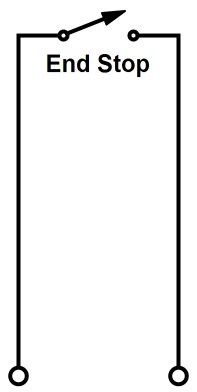
Gli interruttori di fine corsa sono interruttori standard "sempre aperti". Un fine corsa viene attivato quando il perno di fine corsa si collega a terra (quando si imposta con impostazioni GRBL predefinite).
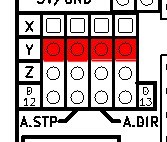
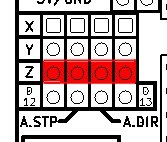
Configurazione di Micro Stepping per ciascun asse
Ogni asse ha 3 jumper che possono essere impostati per configurare il micro stepping per l'asse.
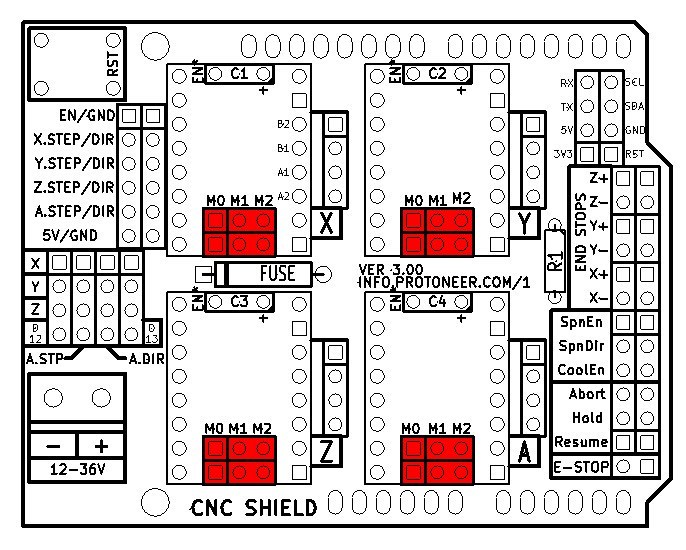
Nelle tabelle sotto High indica che un Jumper è inserito e Low indica che nessun jumper è inserito.
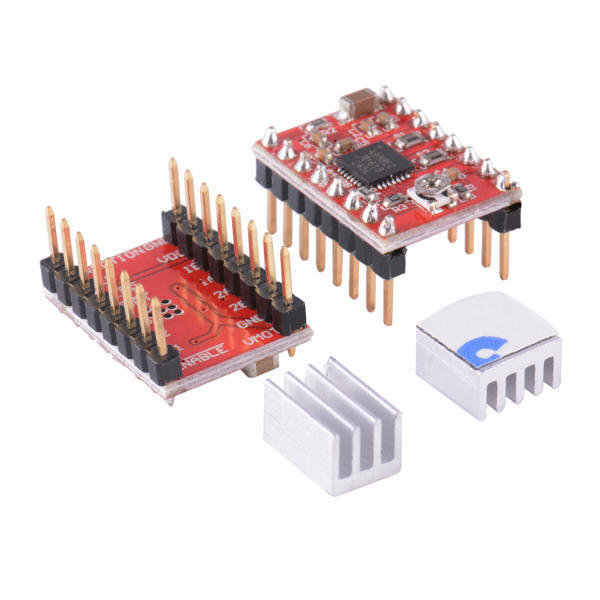
Scheda driver con finale A4988
Scheda driver con finale A4988 ( originale Allegro) per comandare un motore passo passo con da Arduino o altri microcontrollori .
| A4988 DMOS Microstepping Driver with Translator And Overcurrent Protection | ||
 |
|
 |
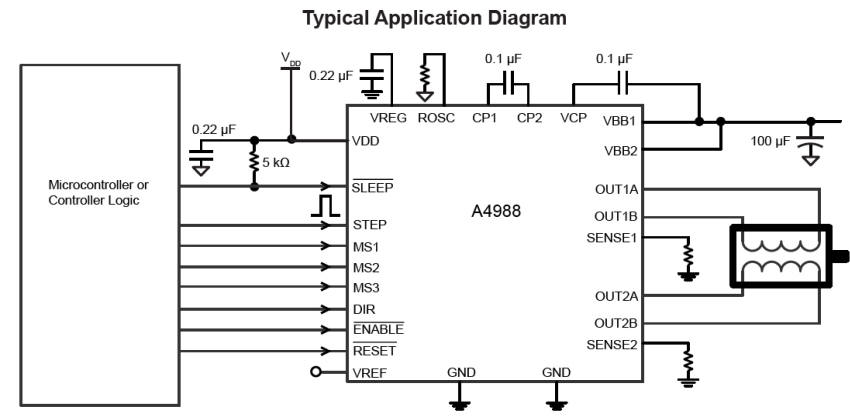
La scheda (disponibile a seconda dei lotti con
circuito stampato ROSSO o VERDE) necessita di alimentazione di 5Vdc per
la logica e una tensione da 8 e 35Vdc per il motore.
L’uscita può di pilotare motori fino a 2A con dissipatore o ventilazione
e gestisce il pilotaggio di stepper in micropasso.
Il micropasso (passo intero, 1/2, 1/4, 1/8 o 1/16 di passo) è
impostabile tramite gli appositi ingressi siglati "MS1-MS2-MS3" (
consultare il datasheet del Chip).
E’ possibile la regolazione della corrente di uscita tramite un
potenziometro a vite. Dotata di shutdown termico a temperatura eccessiva
e blocco sotto tensione.
Misure scheda : 20x15 mm, per un peso di soli 4 gr.
 |
 |
Installazione dissipatore di calore
Per il test, si inserirà lo shield su una scheda Arduino UNO originale o clone,si inserirà almeno uno dei moduli controllo motore A4988, e un motore passo passo. Occorre poi collegare alla morsettiera di alimentazione motore, una fonte in grado di fornire una tensione minima di 12V-2A.
Lo sketch farà compiere al motore un determinato numero di passi, seguiti da una pausa.
![]()
sketch "test_CNC_shield.ino"
Sketch testato con versione IDE 1.8.5
|
![]()
sketch "CNC_shield.ino"
Sketch testato con versione IDE 1.8.5
|
| Elenco revisioni | |
| 08/12/2020 | Aggiornato pagina |
| 21/10/2018 | Emissione preliminare |