![]()


ultimo aggiornamento 16 ottobre 2011
|
ultimo aggiornamento 16 ottobre 2011 |
|
|
|
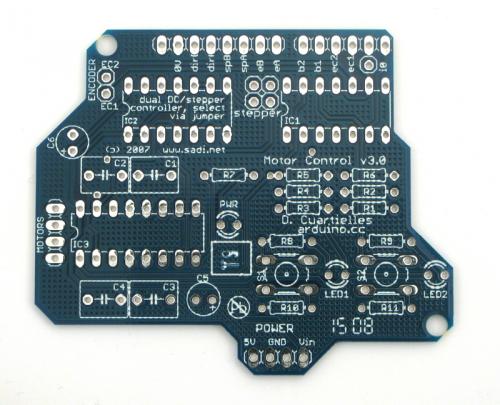
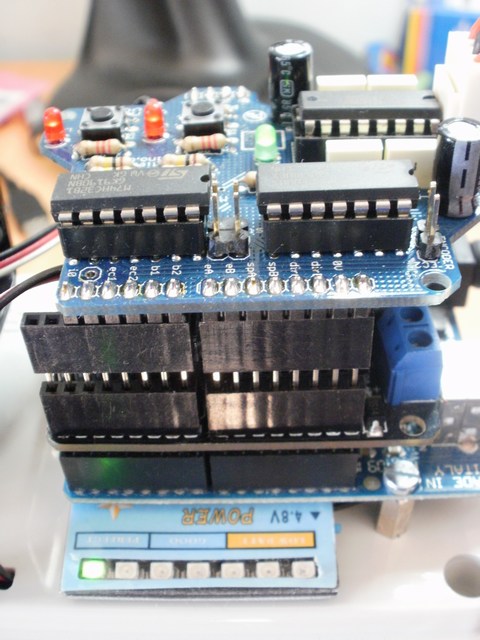
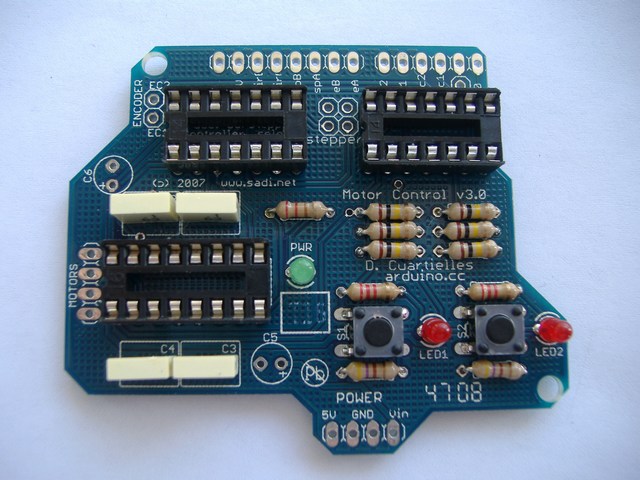
ArduinoBOT utilizza per azionare i suoi due motoriduttori al scheda Motor shield V 3.0 che appunto permette collegata alla scheda Arduino 2009 o una Arduino UNO di pilotare due motori DC.
I motori sono del tipo DC (a corrente continua)
che possono funzionare alla tensione di Vin che è la tensione di
alimentazione elettrica della scheda .
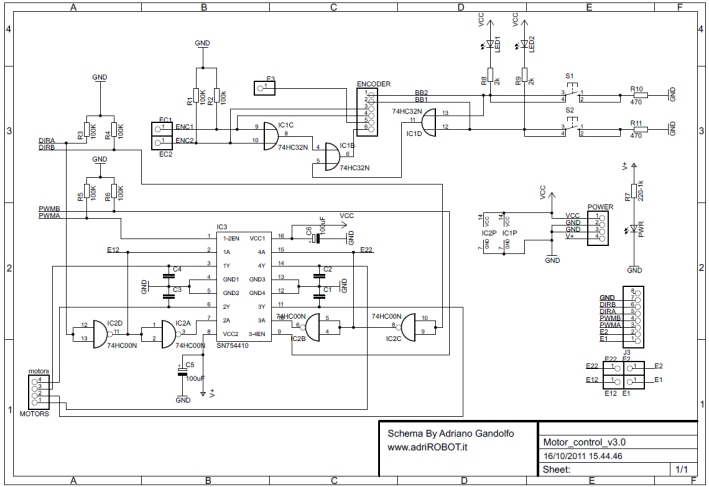
Il driver del motore l'integrato
SN754410 (L293D-compatible)
e può
sopportare tensioni comprese tra 3.6V a 36V motori (1A).
Ma dato che la scheda è progettata per prendere la tensione di
alimentazione da quella della scheda Arduino i valori si riducono al
range 6-20V, nel nostro caso questa tensione è di 6V fornita dalla
batteria del robot.
Per altre informazioni vedere il link
http://arduino.cc/playground/MotorControlShieldV3/0

 |
 |
Schema elettrico della scheda

|
|
|
||||||||||||||||||||||||||||||
ESEMPIO PROGRAMMA DI GESTIONE
![]()
int dirA = 12; int dirB = 13; // not used in this example int speedA = 10; int speedB = 11; // not used in this example void setup() { pinMode (dirA, OUTPUT); pinMode (dirB, OUTPUT); pinMode (speedA, OUTPUT); pinMode (speedB, OUTPUT); } void loop() { // move the motor A to one direction increasing speed digitalWrite (dirA, HIGH); for (int j = 0; j < 255; j += 10) { analogWrite (speedA, j); delay (100); } delay(1000); // keep the motor rolling for one second // move the motor A to one direction decreasing speed digitalWrite (dirA, HIGH); for (int j = 255; j >= 0; j -= 10) { analogWrite (speedA, j); delay (100); } // stop the motor digitalWrite(speedA, LOW); delay(1000); // keep the motor stopped for one second }
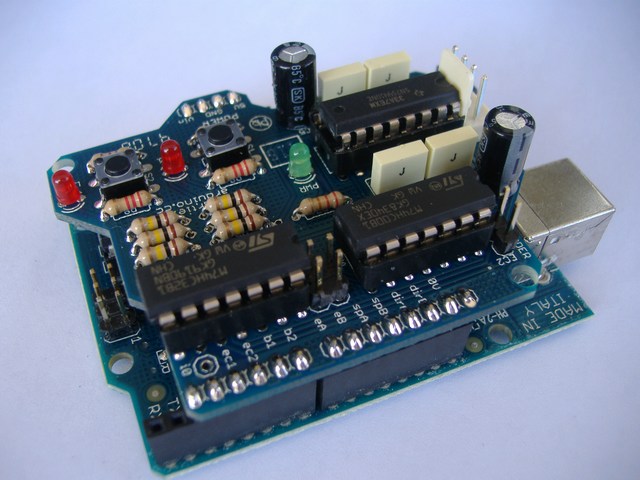
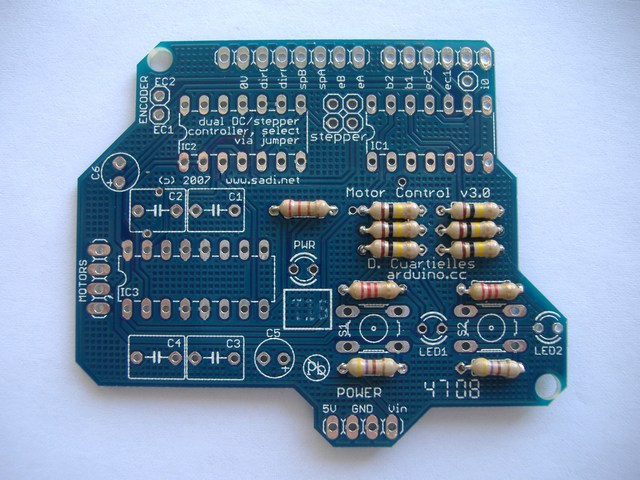
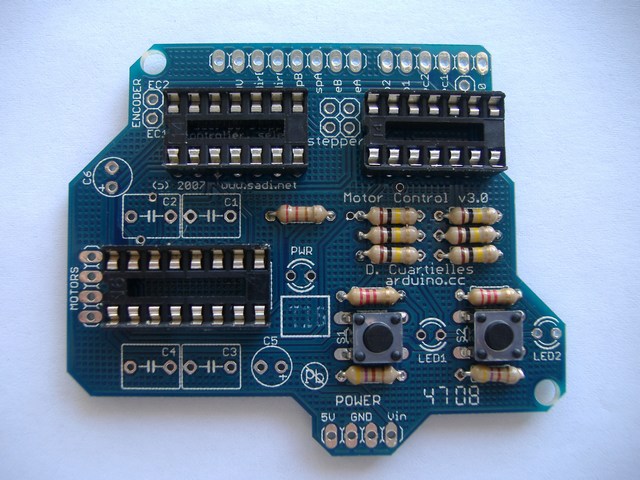
FOTO DEL MONTAGGIO DELLA SCHEDA
 |
 |
 |
 |
 |
 |
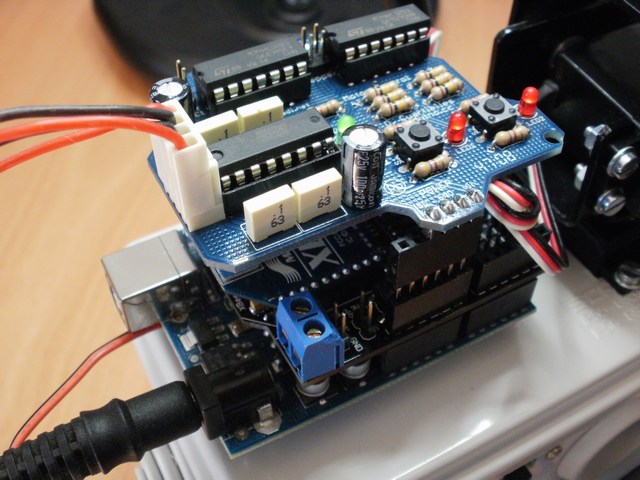
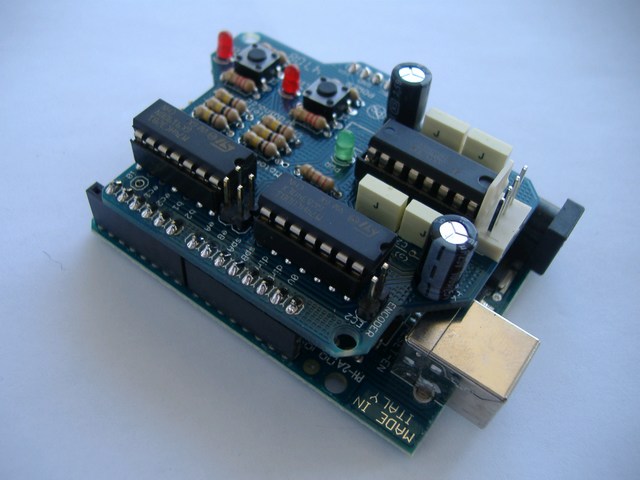
FOTO DELLA SCHEDA MONTATA SULLA SCHEDA ARDUINO DUEMILANOVE
 |
 |
SCHEDE TECNICHE DEI COMPONENTI
| SN754410 Driver per ponte H | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| L293D Driver per ponte H | ||
|
|
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| SN74HC00 Quad 2-input NAND gate | ||
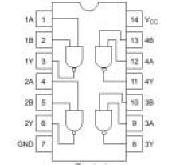 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
Esempio utilizzo: Motor shield arduino |
||
| 74HC32 Quad 2-input OR gate | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
Esempio utilizzo: Motor shield arduino |
||
| Elenco revisioni | |
| 16/10/2011 | Emissione preliminare |