
ultimo aggiornamento 14 gennaio 2012
|
ultimo aggiornamento 14 gennaio 2012 |
|
|
|
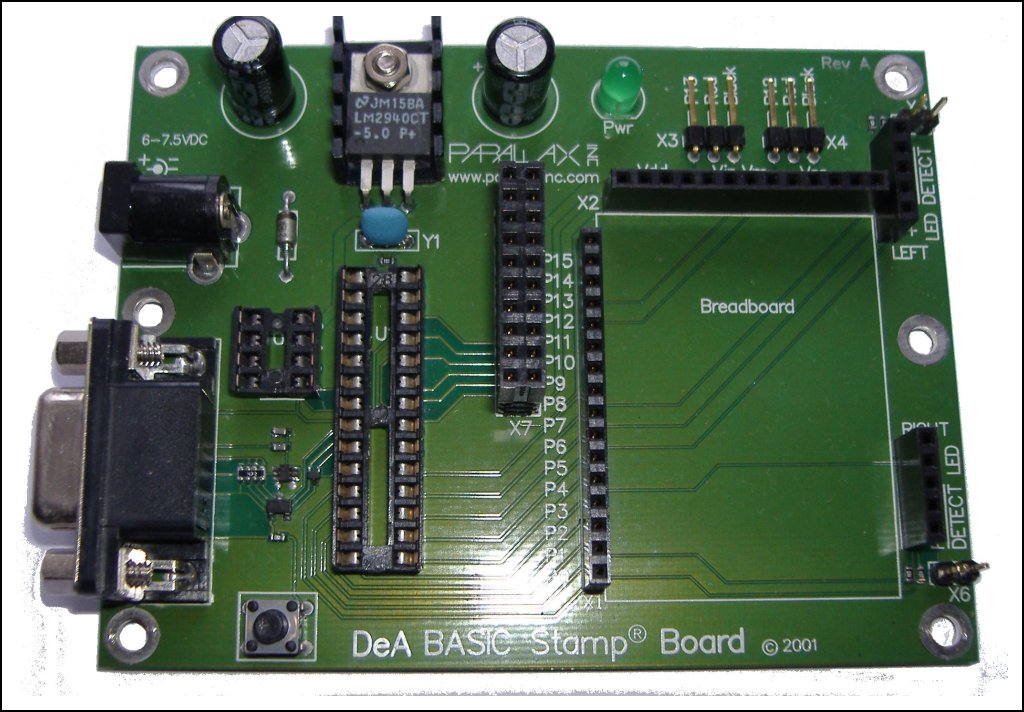
Per controllare il robot BUG Scheda di controllo DeA Basic Stamp Board, questa era prodotta dalla Parallax per la DeAgostini ed utilizzata per il robot Panettone allegata ai fascicoli n° 11-12-13-21.
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |

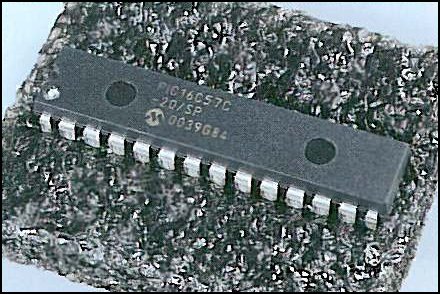
Il microcontrollore utilizzato sulla scheda è un chip PIC16C57C (di cui è
proprietaria l'industria Microchip), sul quale è stato integrato
l'interprete del linguaggio PBASIC (ossia Parallax Basic, un'estensione
dei linguaggio BASIC realizzata dalla Parallax ) chip e interprete,
insieme, formano il circuito proprietario BASIC STAMP 2 di Parallax.
L'interprete opera da interfaccia tra il programma PBASIC, memorizzato
nella EEPROM, e il microcontrollore.
Sulla scheda è inoltre presente un chip di memoria EEPROM di 2048 byte di
capacità, per lo sviluppo del programma, il modello utilizzato e il
24LC16B prodotto dalla Microchip.
| 1 |
Connettore DB9 La scheda può comunicare con il computer grazie alla porta seriale DB9 a 9 pin, questa consente di scaricare dal PC al chip di memoria del robot i programmi che successivamente il microcontrollore eseguirà. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 2 |
La
memoria EEprom: La scheda DeA Basic Stamp Board monta un chip di memoria EEPROM di 2048 byte di capacità, per lo sviluppo del programma, non espandibili.
|
 |
|||||||||||||||||||||||||||||||||||||||||||||
 |
|||||||||||||||||||||||||||||||||||||||||||||||
| 3 |
Il
microcontrollore: il microcontrollore utilizzato in questo robot è un chip
PIC16C57C (di cui è proprietaria l'industria
Microchip), che è il vero e proprio controllore,
sul quale è stato integrato l'interprete del linguaggio
PBASIC (ossia Parallax Basic, un'estensione dei linguaggio BASIC realizzata dalla
Parallax )chip e interprete, insieme, formano il circuito proprietario
BASIC STAMP 2 di Parallax. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 4 | Pulsante START/STOP: il tasto start/stop, che controlla il programma presente nella memoria del robot. Questo pulsante permette Infatti di attivare o di interrompere l'esecuzione di un programma, senza però che tali operazioni di controllo comportino la cancellazione del programma dalla memoria. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 5 | Morsetto di
alimentazione: attraverso
il quale la scheda viene alimentata. La tensione deve essere compresa tra i 6 e 7.5 V corrente continua. La mancanza della tensione di alimentazione non cancella il programma all'interno della memoria del processore. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 6 |
Integrato di regolazione:
l'integrato utilizzato nel circuito di regolazione è un LM2940
prodotto dalla National
Semiconductor. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 7 |
LED: il led di colore verde si illumina quando la scheda madre è alimentata. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 8 |
Connettore
di espansione: Al centro della scheda madre è posto il bus di espansione contrassegnato dalla sigla X7.
|
|
|||||||||||||||||||||||||||||||||||||||||||||
| 9 |
Connettore
ingressi/uscite: Alla destra dei bus di espansione X7, si trova uno slot con 16 socket,
contrassegnato con la sigla X1. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 10 |
Connettore
alimentazione: Disposto in orizzontale e contrassegnato con X2, si trova uno slot con 13 socket
suddivisi
in più gruppi: 5 socket Vdd, 2 Vin, 1 Vm e altri 5 Vss. |
|
|||||||||||||||||||||||||||||||||||||||||||||
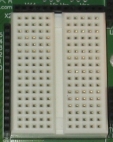
| 11 |
Breadboard:
si tratta di un supporto di plastica che ospita tanti socket collegati tra loro da sottili piste in rame, presenti nella parte inferiore dei supporto. |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 12 |
Contatti per alimentazione
servomotori: a questi pin vanno collegati i servomotori questi sono
dotati di una morsettiera con tre fili |
|
|||||||||||||||||||||||||||||||||||||||||||||
| 13 |
Slot per sensore ad infrarossi: ogni slot è composto da un gruppo di 3 socket (indicato con DETECT) e da uno di 2 socket (denominato LED). In questi slot verranno alloggiati i sensori a infrarossi- un LED emettitore dei segnale a infrarossi e un diodo ricevitore (il vero e proprio sensore) che, in presenza di ostacoli, riceve il segnale riflesso. |
|
|||||||||||||||||||||||||||||||||||||||||||||
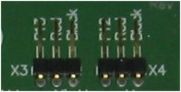
| 14 |
Connettori sensori di contatto: vicino ai sensori a infrarossi si trovano i due
connettori siglati X5 e X6, per i sensori di contatto (detti baffi) |
|
Per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda possono utilizzare la nuova scheda della Parallax denominata Scheda USB BoE +chip BS2 + Kit con la possibilità di collegamento tramite USB, la potete trovare sul sito della Essegi Elettronica srl www.homotix.com codice 28803 al costo di 72 € (IVA e trasporto escluso.)
|
|---|
| Elenco revisioni | |
| 14/01/2012 | Emissione preliminare |
| 02/06/2006 | Emissione preliminare |