![]()
CP2102 USB to TTL Converter
ultimo aggiornamento 5 maggio 2019
|
CP2102 USB to TTL Converter ultimo aggiornamento 5 maggio 2019 |
|
|
|
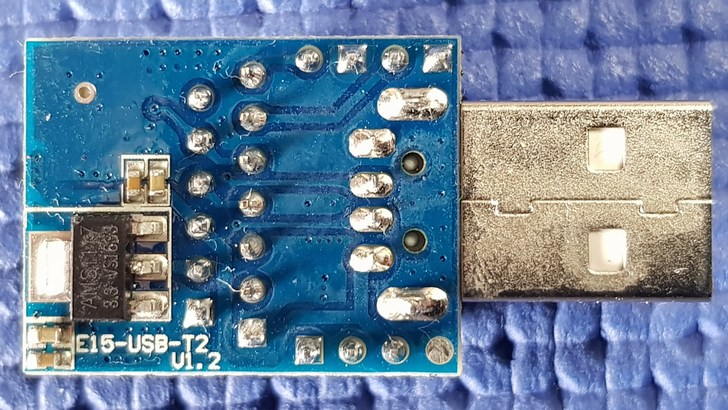
Il modulo di conversione
UART E15-USB-T2,
prodotto dalla Chengdu Ebyte Electronic Technology Co., Ltd. è stato
creato principalmente per la programmazione dei loro moduli wireless E30 ~ E70,
ma può essere utilizzato come normale interfaccia per collegare dispositivi che
utilizzano una porta UART - TTL con i normali PC che utilizzato porte
USB.
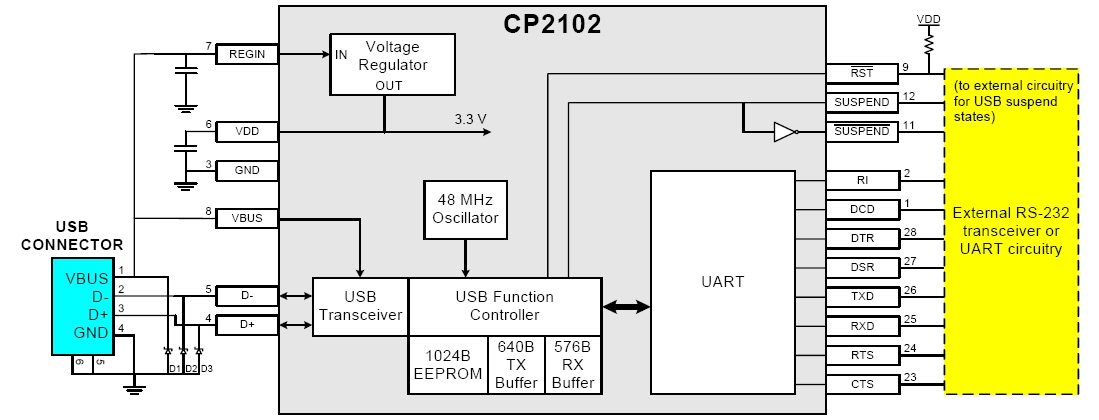
Il modulo è basato sul chip CP2102 prodotto dalla Silicon Labs.
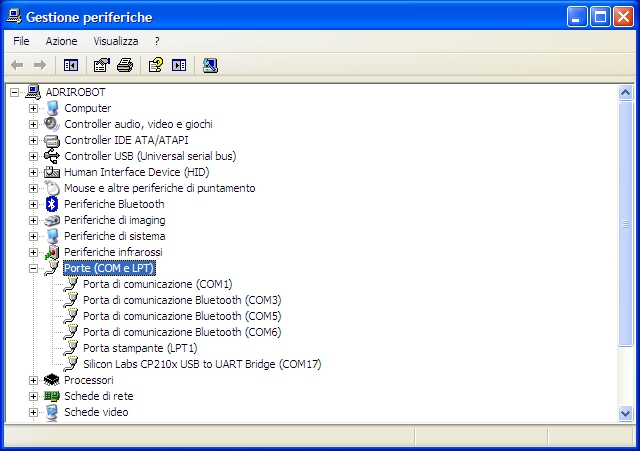
Si collega al bus USB tramite un connettore USB femmina tipo B e appare come
una porta COM standard.
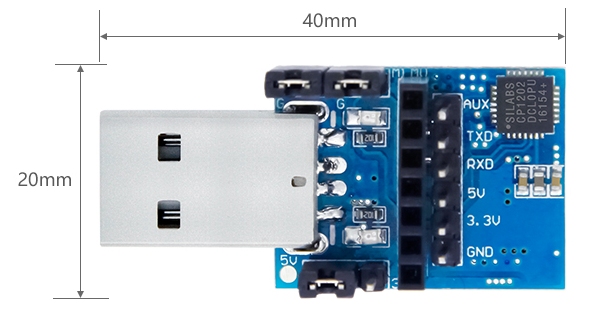
Il CP2102 non richiede alcun oscillatore esterno, ha un regolatore di tensione a bordo e utilizza anche un EEPROM interna riprogrammabile per la descrizione del dispositivo, dispone di un controllo di flusso per baud rate da 300bps a 921600bps.

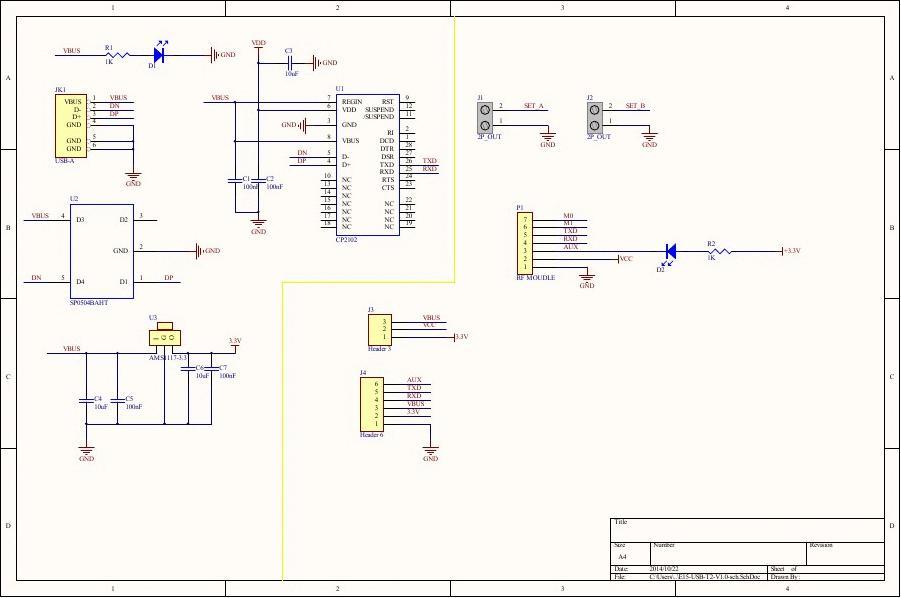
Il circuito elettrico è molto semplice in quanto tutto ruota intorno al chip CP2102, sul modulo è inoltre presente un regolatore AMS 117 3.3 che permette di fornire un'uscita di 3,3 V, la tensione di 5V è invece derivata direttamente dalla porta USB.
| CP2102 USB to TTL | ||
 |
|
 |
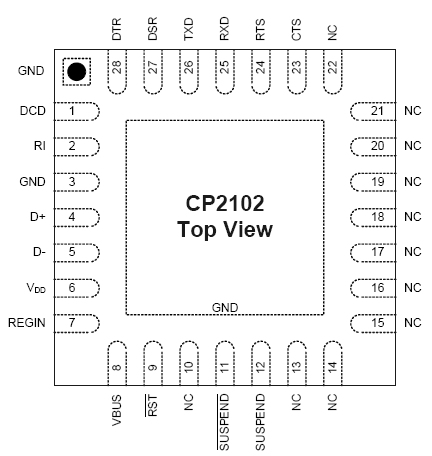
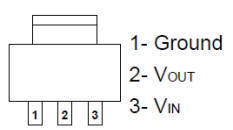
| Piedinatura | Datasheet | Foto dell'integrato |
| AMS1117 1A Low Dropout Voltage Regulator | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |

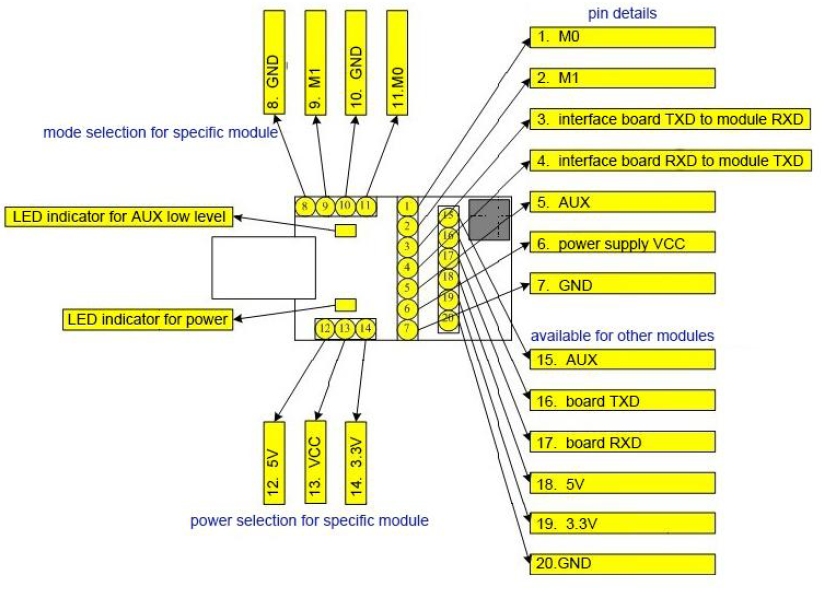
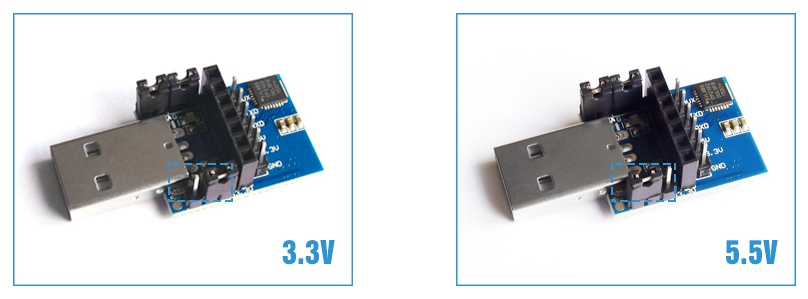
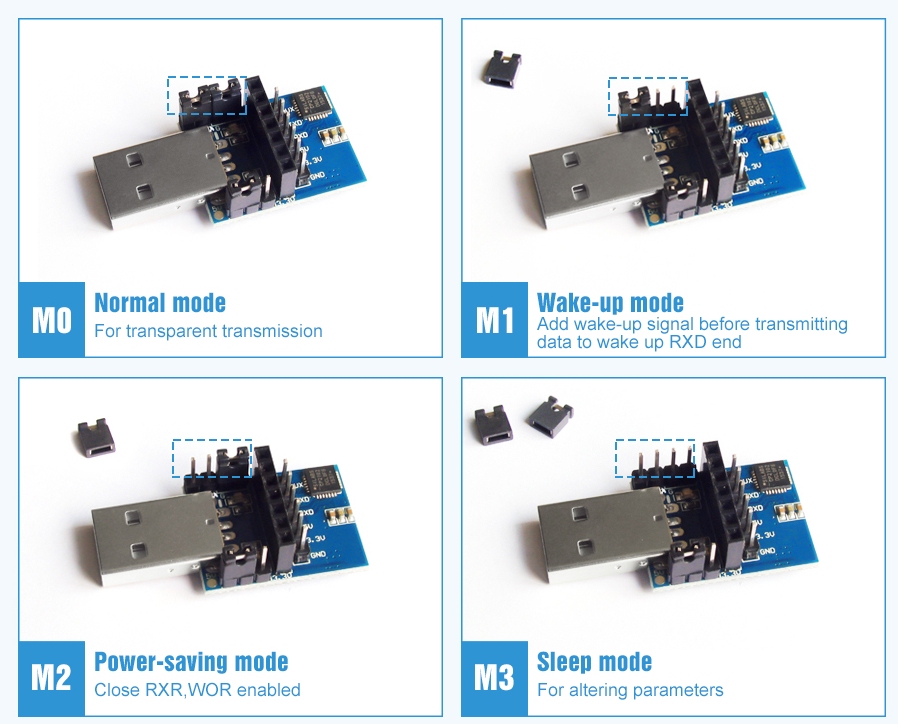
Ci sono quattro modalità operative del modulo che possono essere controllate tramite l'impostazione di Pin M0 e M1. I dettagli sono mostrato nelle figure sotto, se il moduli viene utilizzato semplicemente come convertitore l'impostazione da utilizzare è il M0, per cui con i due cavallotti montati.
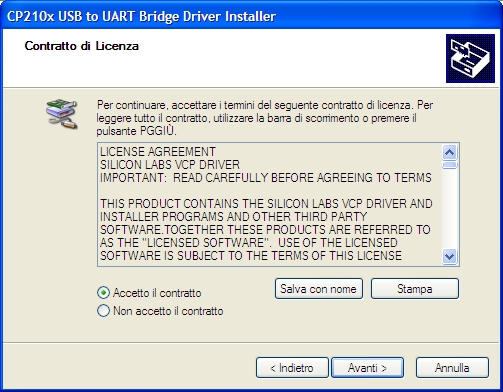
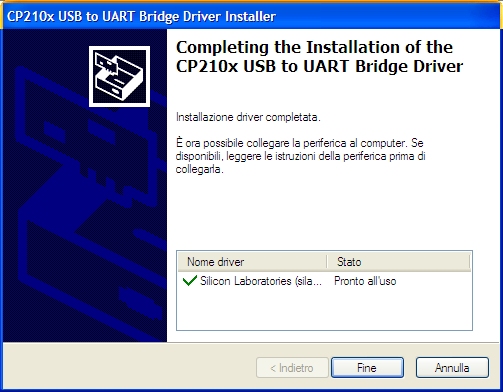
Per il funzionamento del convertitore è necessario caricare i relativi driver. Per questo occorre recarsi sul sito del produttore del chip dove troverete i driver aggiornati (Link) , sono disponibili per tutti i principali sistemi operativi Windows 10 e precedenti, Linux, Android, Macintosh OSX, ect
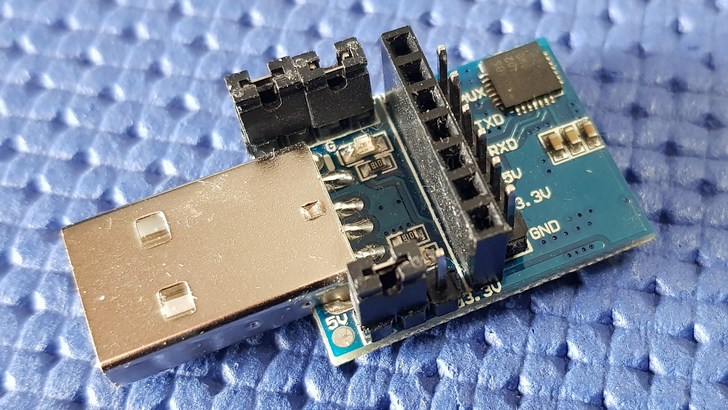
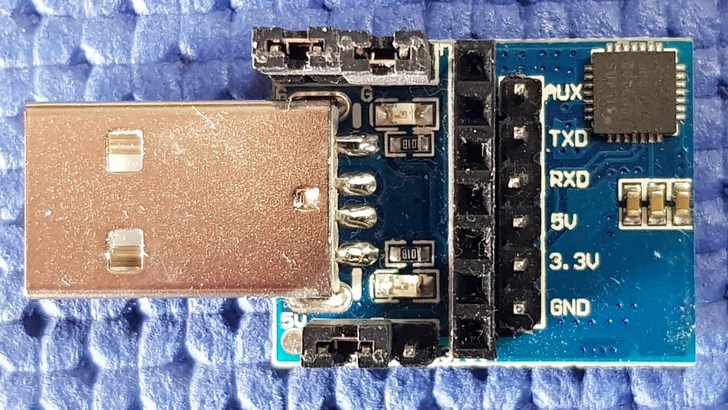
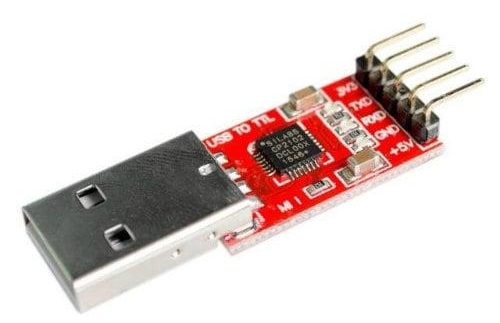
Altre versioni del convertitore
Esistono in commercio altre versioni di convertitori USB Seriale che utilizzano il chip CP2102, per esempio il modello sotto riportato che può essere trovato sul sito Homotix
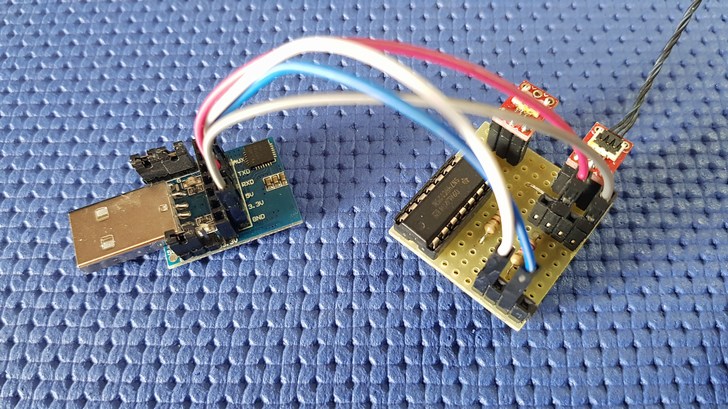
Esempio di utilizzo per la gestione dei servomotori del robot Robi
| Elenco revisioni | |
|
05/05/2019 |
Emissione preliminare |