![]()

ultimo aggiornamento 16 gennaio 2013
|
|
ultimo aggiornamento 16 gennaio 2013 |
|
|
|
|
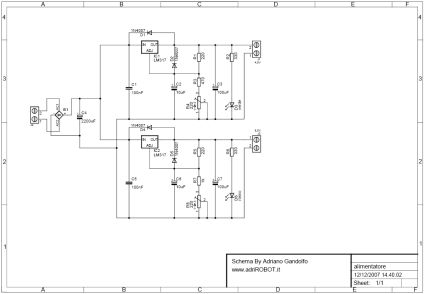
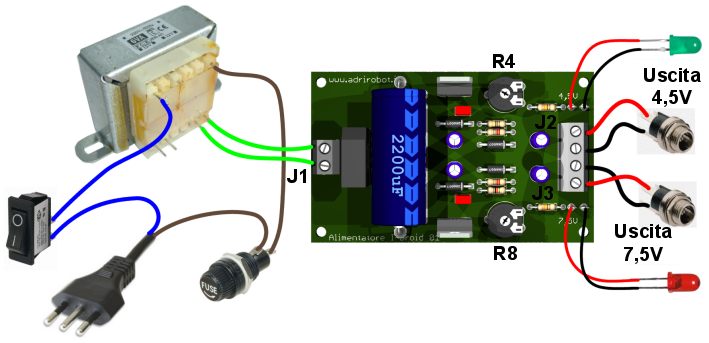
Per l'alimentazione del robot nelle fasi di prova che non prevedono il movimento, ho previsto la realizzazione di un' alimentatore che fornirà al robot le due tensioni necessarie:
Il circuito dell'alimentatore utilizza l'integrato LM317 che è uno dei più versatili stabilizzatori di tensione e di corrente.
|
|

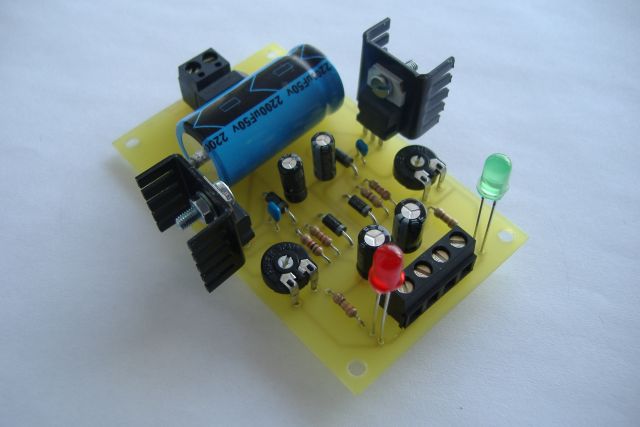
Foto della scheda montata
|
|
|||
|
|
||||||||||||||||||||||||||||||||
Dimensionamento del circuito
|
Per calcolare la
tensione minima del trasformatore occorre considerare la tensione di uscita che
vogliamo ottenere. Riassumendo occorre un trasformatore con le seguenti caratteristiche: tensione 12V, corrente 3 A, potenza 40VA per esempio vedere il link. |
|
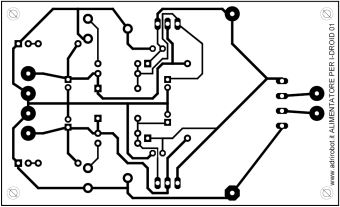
Montaggio del circuito stampato
Per la costruzione
della scheda si procederà iniziando dalla realizzazione del circuito stampato il
cui lato rame in scala 1:1 è possibile scaricare.
Per la sua realizzazione si utilizzerà una basetta in vetronite
(monofaccia) di dimensioni 86x52 mm, il metodo potrà essere quello della
fotoincisione o del trasferimento termico utilizzando i cosiddetti fogli blu
(PRESS-N-PELL), in questo caso ricordo che l’immagine delle tracce del circuito
dovrà essere speculare.
 |
 |
Una volta inciso il rame, si verificherà in controluce o mediante
l’utilizzo di un multimetro che non vi siano cortocircuiti soprattutto tra le
piste più vicine.
Si passerà quindi alla foratura della stessa, utilizzando principalmente
una punta da 0,8 mm, mentre si utilizzeranno una da 0,9 mm per i diodi, i
regolatori di tensione, una dal diametro di 1 mm per le morsettiere, occorrerà
poi una punta da 3,5 mm per i fori di fissaggio fissaggio della basetta
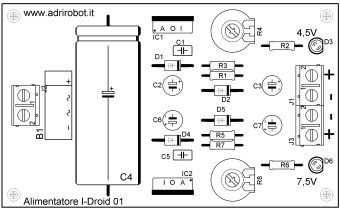
In seguito si potrà passare al posizionamento e alla saldatura dei
componenti seguendo lo schema.
Per la saldatura si utilizzerà un piccolo saldatore a punta fine, della
potenza di circa 25 – 30 W.
S’inizierà con i componenti a basso profilo come le resistenze, i diodi,
il condensatore il ponte raddrizzatore, si salderanno poi le morsettiere.
Occorre poi inserire le alette di raffreddamento ai regolatori di
tensione.
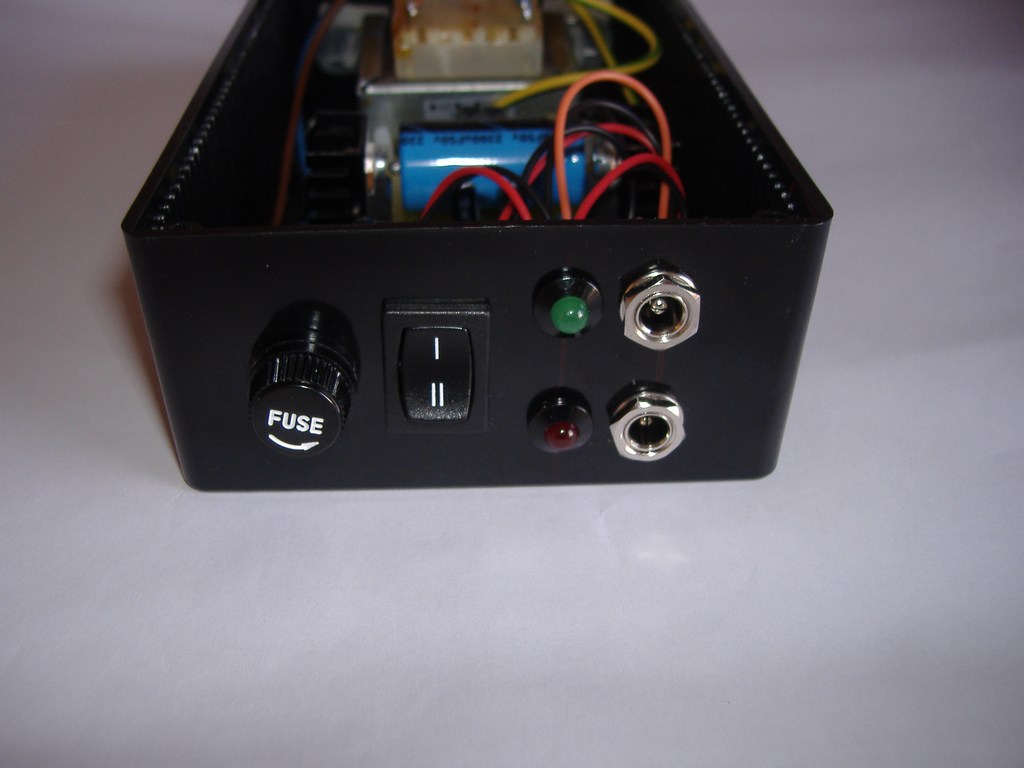
Il contenitore
Il contenitore utilizzato per il caricabatteria è prodotto dalla ditta TEKO ed è il modello coffer 3, su di esso occorre realizzare i fori per il fissaggio delle boccole, interruttore, portaled e passacavo.
|
|
 |
Schema del cablaggio elettrico
Alcune fasi di montaggio
|
|
|
|
|
|
Taratura del circuito
A montaggio ultimato si procederà alla taratura, collegato alla morsettiera J2 l'idoneo trasformatore con l'aiuto di un tester si verificherà la tensione a vuoto presente sulla morsettiera J2 (4,5V) e J3 (7,5V) modificando con l'aiuto di un cacciavite a punta piatta la posizione del potenziometro R4 e R8 rispettivamente sino a leggere l'esatto valore di tensione
|
|
|
||
Data sheet dei componenti attivi utilizzati
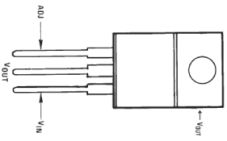
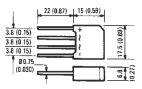
| LM 317 Regolatore di tensione regolabile | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Ponte raddrizzatore 2KBP | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
| Diodo 1N4007 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
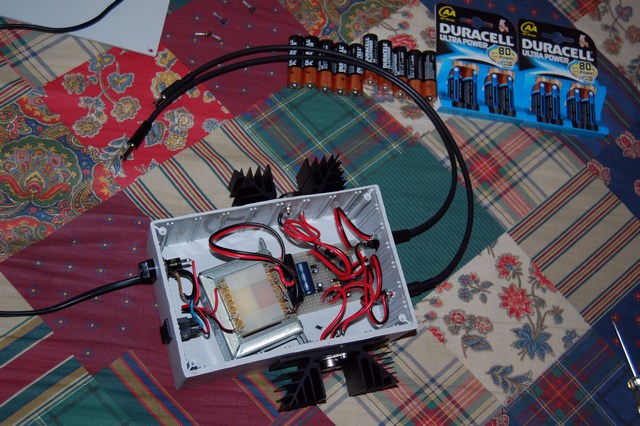
Realizzazione di Dino Lumini e Andrea Niccolini
Sotto è visibile la realizzazione
dell'alimentatore fatta dal prof. Dino Lumini con la collaborazione di Andrea
Niccolini, rispetto al mio progetto sono stati sostituiti gli integrati tipo
LM317 in contenitore TO 220, con 2 LM 317 in contenitore TO 3 montati su due
generose alette di raffreddamento.
|
|
|
|
|
|
| Elenco revisioni | |
| 16/01/2013 | Aggiornato pagina, Inserito foto del montaggio realizzato da un'utente del sito |
| 16/10/2009 | Aggiornato pagina, Inserito foto del montaggio del contenitore. |
| 17/12/2007 | Inserito foto del montaggio del prototipo. |
| 28/09/2007 | Emissione preliminare |