![]()

ultimo aggiornamento
22/02/2006
|
|
|
|
|
|
|
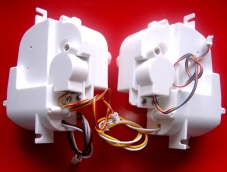
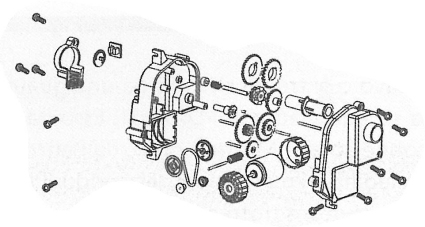
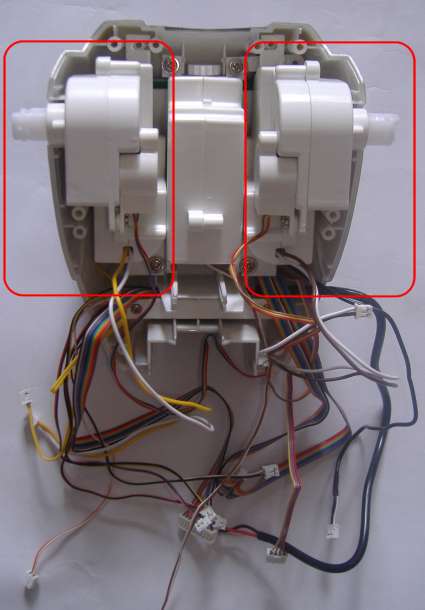
Per la movimentazione delle braccia del
robot occorre montare due riduttori uno per quello destro e uno per
quello sinistro. |
|

|
|
|
|
|
||||
|---|---|---|---|---|
|
||||||||
|---|---|---|---|---|---|---|---|---|
|
||||||||
|---|---|---|---|---|---|---|---|---|
| Elenco revisioni | |
| 17/05/2006 | Emissione preliminare |