![]()
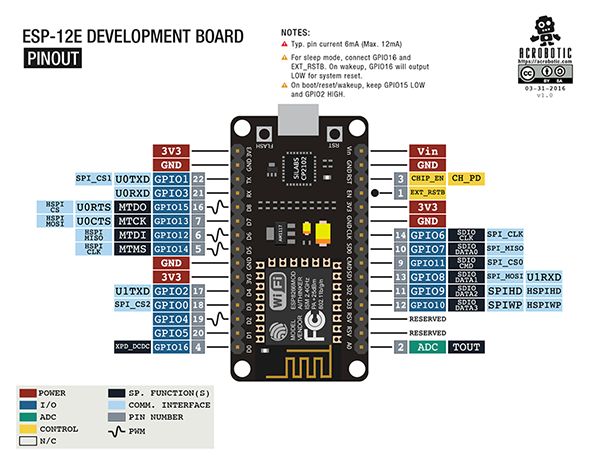
NodeMCU Ver V2
ESP-12E
ultimo aggiornamento 23 agosto 2020
|
NodeMCU Ver V2 ultimo aggiornamento 23 agosto 2020 |
|
|
|
La NodeMCU è una piattaforma open source
sviluppata specificatamente per l'IOT, Essa include un firmware che funziona
tramite il modulo Wi-Fi SoC ESP8266 e hardware con la base del modulo ESP-12 ed
è programmabile in linguaggio
Lua.
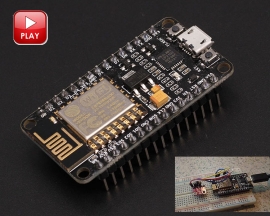
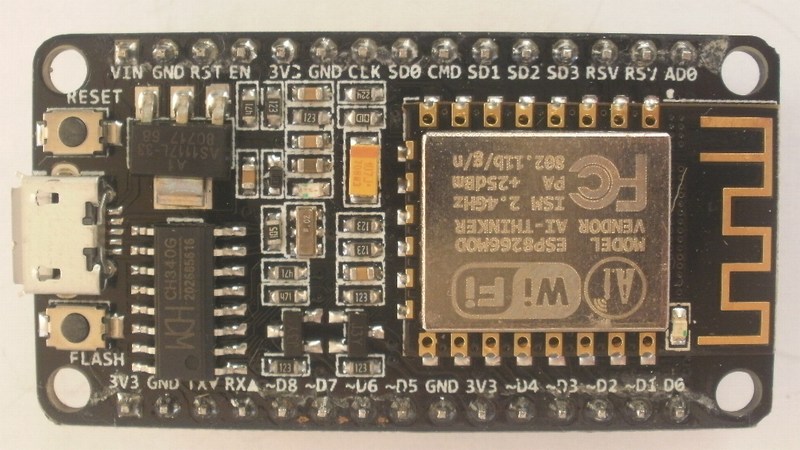
Questa scheda rappresenta l'evoluzione della precedente, è molto simile, la
differenza più evidente è la sua dimensione è ora di 48x25 mm che meglio si
adatta alle breadboard, il chip è stato aggiornato da un ESP-12 a un ESP-12E.
Per la comunicazione con il PC utilizza un chip CP2102 (oppure un CH340 nei
primi modelli prodotti).
Il modello nelle foto è una versione superata, il modulo ora in produzione può essere acquistato presso la ICStation con il codice 6034 ad un costo di circa 5 €
![]()



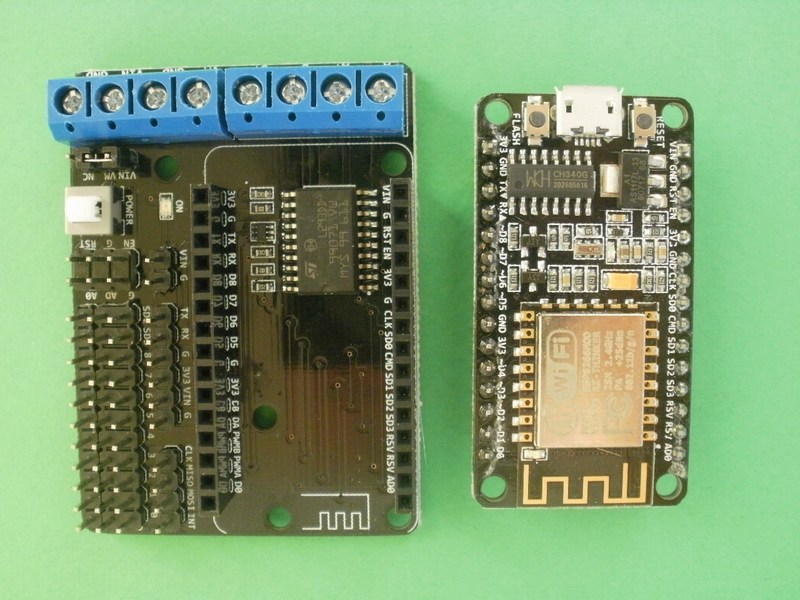
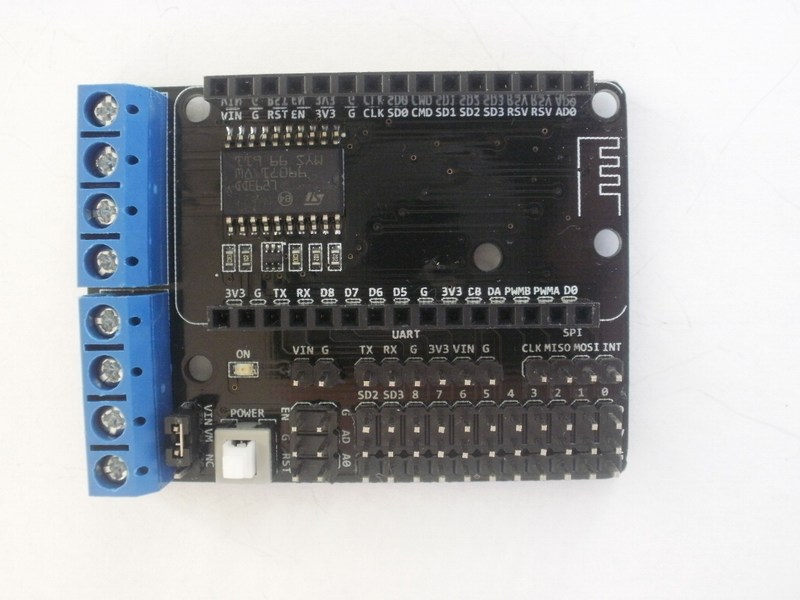
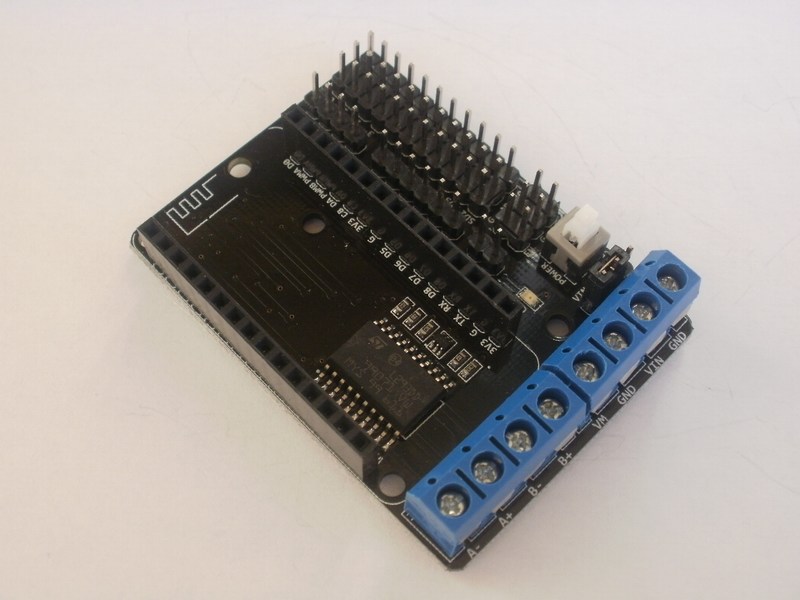
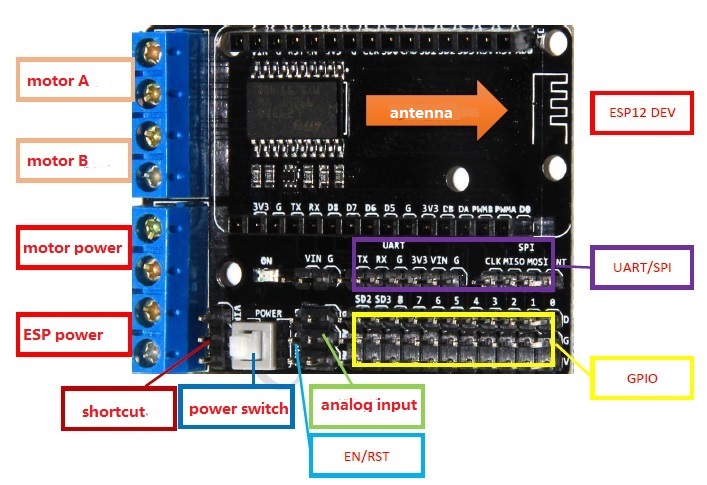
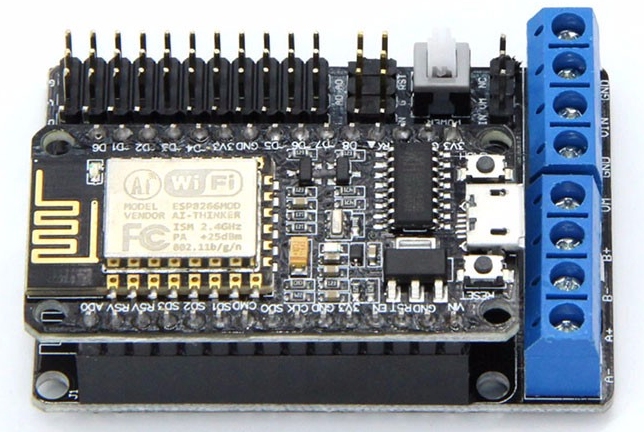
Per un più semplice interfacciamento con i dispositivi esterni è conveniente utilizzate una base come la ESP12E Motor shield (manuale) prodotta dalla DOIT dalle dimensioni di 58x43mm.
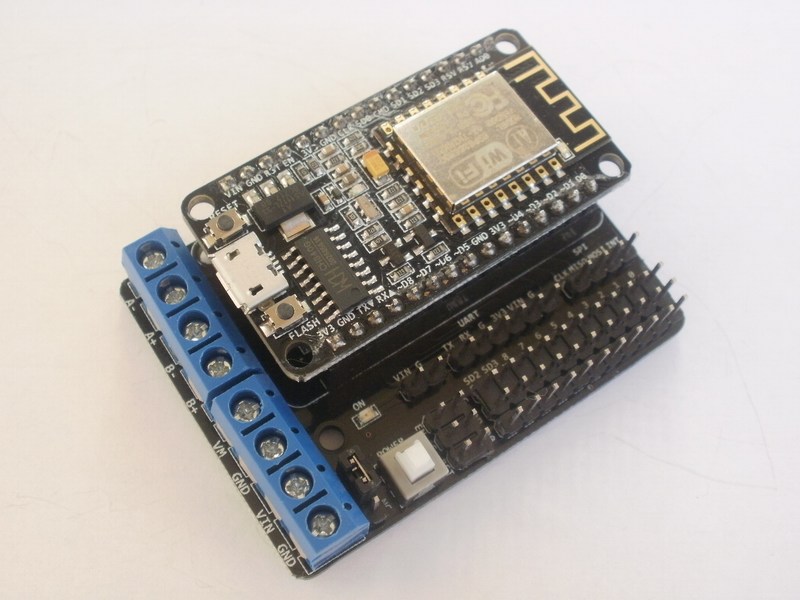 |
Lo shield permette di utilizzare al meglio la scheda di sviluppo estendendo le porte di uscita : interfaccia di alimentazione SPI, UART, GPIO, AI
e 3,3V. Permette di comandare 2 motori e dispone di un interruttore di
alimentazione.
Tensione per il motore: 4,5 V-36 V
Tensione per alimentazione scheda ESP: 4,5 V-9 V
Chip driver : L293D
La due morsettiere di alimentazione (motore e scheda) possono evitare interferenze, è comunque possibile effettuare un cortocircuito tra le due per usare una sola fonte di alimentazione in questo caso (V deve essere 4,5 ~ 9 V)
Assorbimento di corrente parte logica: 60mA (Vi = L), 22mA (Vi = H);
azionamento parziale funzionamento Io: 1.2A;
Perdita di potenza massima: 4 W (T = 90)
Segnale di controllo del livello di ingresso: 2.3 ≤VIH≤ VIN (high), -0.3 ≤ VVIL ≤ 1.5V (low);
Temperatura di lavoro: -25 ~ + 125
Tipo di azionamento: doppio controller h-bridge ad alta potenza
Kit porta di controllo Dev ESP12E: D1, D3 (motore A); D2, D4 (motore B)
Peso del modulo: circa 20 g
|
||||||||||||||||
Programmazione delle scheda NodeMCU
Attenzione! Quella che segue è può essere considerata una traccia di come procedere alla programmazione della scheda, dato che in commercio si possono trovano varie versioni del modulo NODEMCU, questa guida potrebbe avere delle variazioni per il modello in vostro possesso.
Per programmare questa scheda saranno necessari:
Cavo USB micro-USB che permetta la trasmissione di dati
Driver CH340,IDE Arduino (il modulo è stato testato con l’IDE Arduino 1.8.5
Libreria di gestione ESP8266WiFi
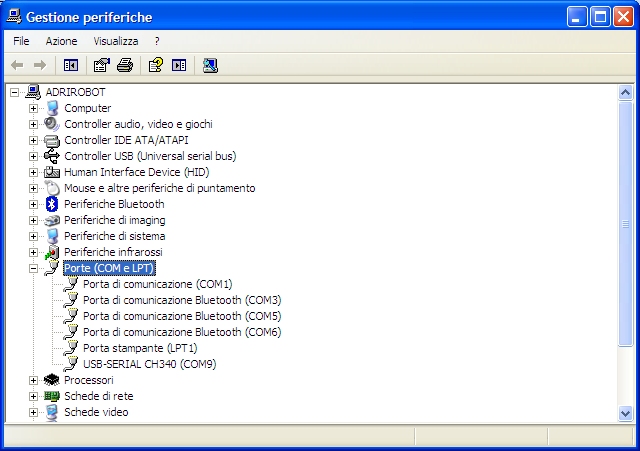
Installato il driver CH340, se avete altre schede "cinesi" potreste aver installato questo driver per cui potere saltare questo passo, per maggiori informazioni vedere questo link, se questo è stato fatto collegando la scheda vedere la creazione della porta RS232
avviate l’IDE Arduino:Cliccate su “File > Impostazioni” si aprirà la finestra “Impostazioni”.
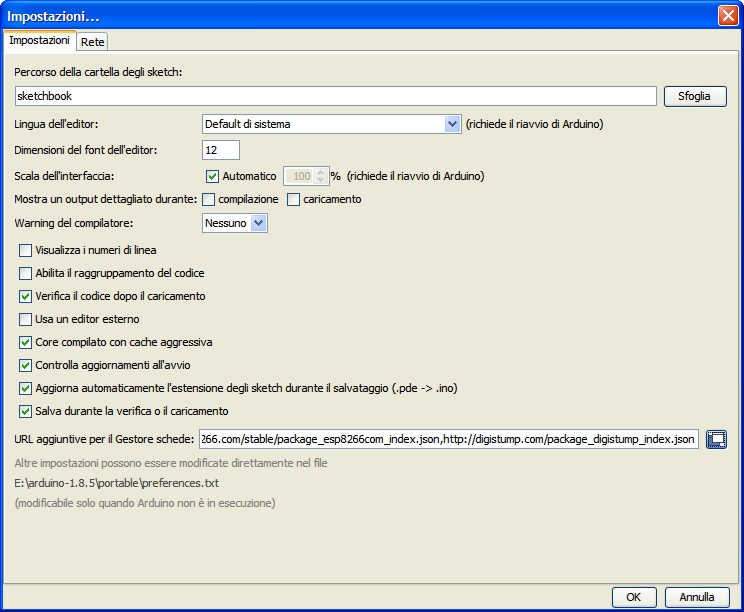
Inserite
nella casella di testo inferiore della finestra (“URL aggiuntive per il gestore
di schede”), l'ultimo che trovate disponibile da
questo
link e cliccate OK per continuare.
Dopo aver fatto questo primo passaggio possiamo installare la scheda, cliccando
dalla schermata principale dell’IDE “Strumenti > Scheda > Gestore schede...” si
aprirà la finestra “Gestore schede”
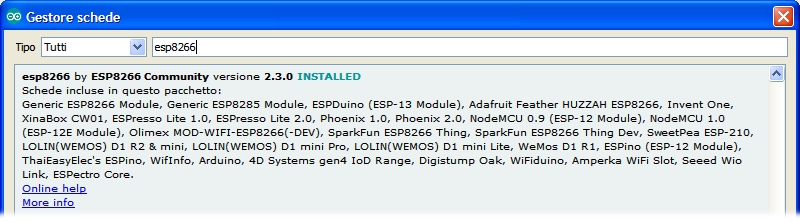
A questo punto nella barra “Filtrate la ricerca” scrivete “esp8266”,
se avete eseguito i passaggi precedenti correttamente troverete l’opzione “Installa”
disponibile. (Si raccomanda di installare l’ultima versione disponibile).
Dopo aver installato la scheda (150MB circa) potrete passare alla
configurazione.
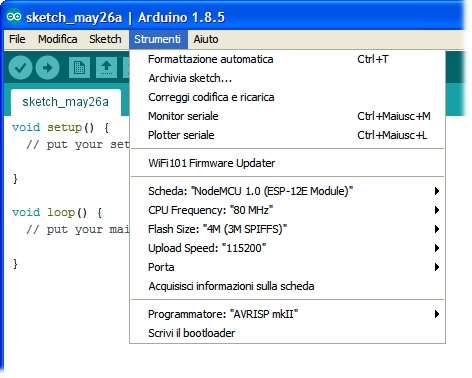
Nella schermata principale dell’IDE cliccate “Strumenti > Scheda > NodeMCU
1.0 (ESP-12E Module).
Cliccate nuovamente su “Strumenti > Upload Speed > 115200”.
Dopo aver fatto ciò avrete terminato la configurazione e l’installazione della
scheda e siete pronti a programmare!
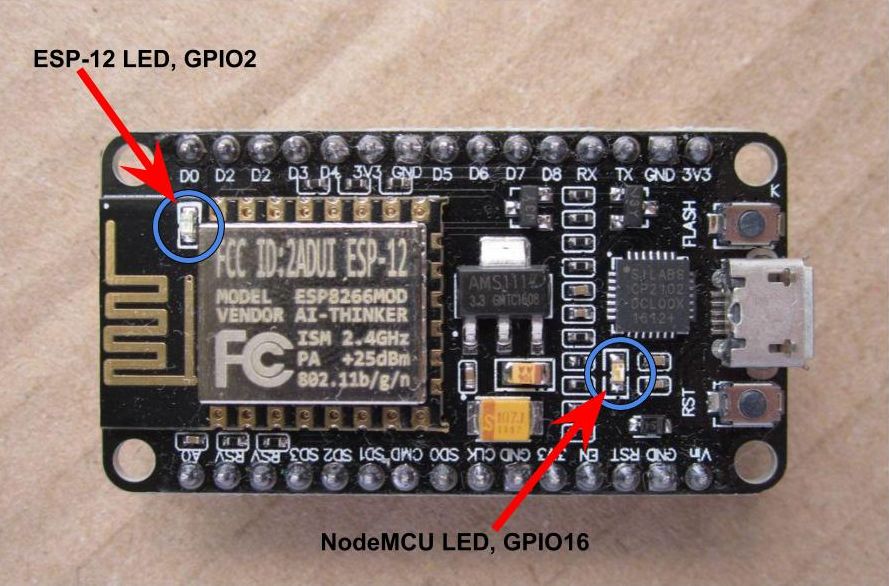
Test dei led presenti sulla scheda
La scheda NodeMCU ESP8266 presenta due led di colore blu tipo SMD 0603 con relativa resistenza limitatrice da 470 Ω, montati sulla scheda.
Il primo saldato sul sul PCB del NodeMCU è connesso al GPIO2
Il secondo sul PCB del modulo ESP-12 è connesso al GPIO16
Questo permette di fare dei test di collegamento senza dover dover collegare alcun componente esterno.
Nota
Entrambi i LED funzionano in modalità “invertita”, per quanto riguarda i livelli
dei pin - quando il pin è ALTO il LED è spento; quando il pin è BASSO, il LED è
acceso. Il LED acceso. GPIO2 lampeggia durante la programmazione ESP, poiché è
collegato al U1TXDpin.
Sotto è riportato lo sketch utilizzabile, sarà sufficiente sostituire il numeo
16 con il 2 per testare il secondo led
|
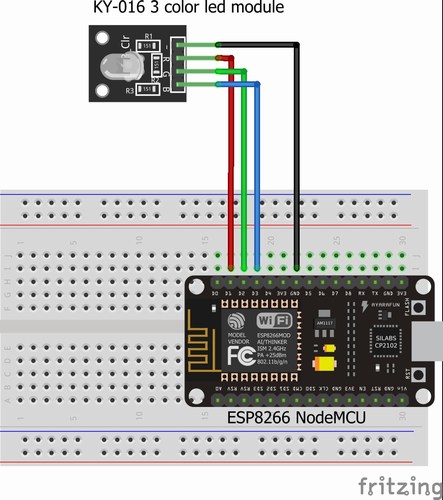
Per testare la scheda NodeMCU si è utilizzato un modulo KY-016 3 color LED module che è formato da un piccolo circuito stampato delle dimensioni di circa 15x16,5 mm con montato un pin header da 4 pin, sul modulo è presente un LED RGB dal diametro di 5 mm a catodo comune che emette i tre colori primari R, G, B.
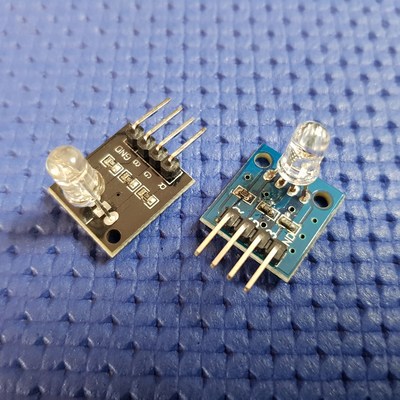
Nello sketch utilizzato si fanno lampeggiare alternando i
loro colori di base (rosso, verde, blu) all'interno di un loop infinito.
Componenti necessari:
Scheda NodeMCU V2
Modulo KY-016 3 color LED module
Cavi di collegamento
Pacco batterie 4x1,2V
/*####################################################################
FILE: test_esp-V2_ky-016.ino
VERSION: 1.0
Descrizione: Programma per test Scheda NodeMCU ESP V2 tramite
il modulo KY-016 3 color LED module
Creato il 26/8/2018 da Adriano Gandolfo
Sito web http://www.adrirobot.it
Blog http://it.emcelettronica.com/author/adrirobot
Pagina Facebook https://www.facebook.com/Adrirobot-318949048122955
Istagram https://www.instagram.com/adrirobot/
This example code is in the public domain.
#################################################################### */
// Definizione dei pin di collegamento
#define redpin D1 // seleziona il pin per il LED rosso
#define greenpin D2 // seleziona il pin per il LED verde
#define bluepin D3 // seleziona il pin per il LED blu
void setup() {
pinMode(redpin, OUTPUT); pinMode(greenpin, OUTPUT); pinMode(bluepin, OUTPUT);
}
void loop() {
digitalWrite(redpin, HIGH); delay(500);
digitalWrite(redpin, LOW); delay(500);
digitalWrite(greenpin, HIGH); delay(500);
digitalWrite(greenpin, LOW); delay(500);
digitalWrite(bluepin, HIGH); delay(500);
digitalWrite(bluepin, LOW); delay(500);
} |
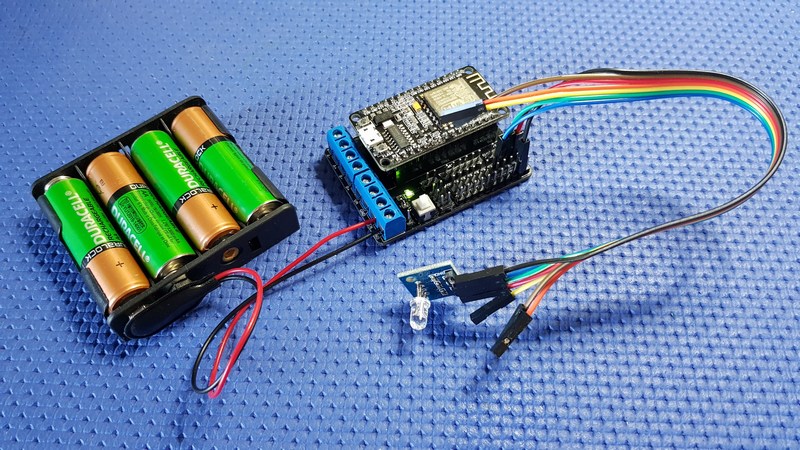
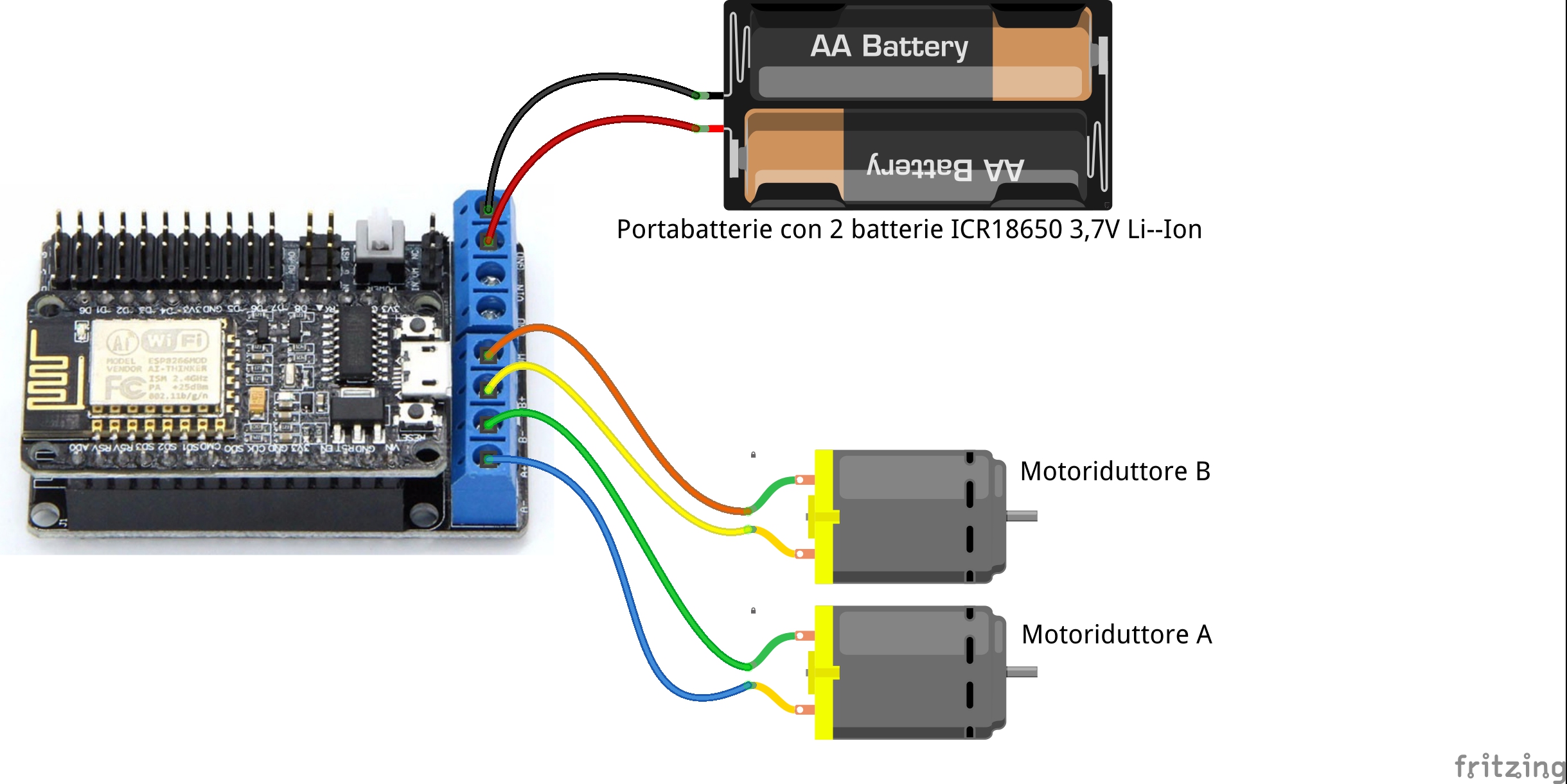
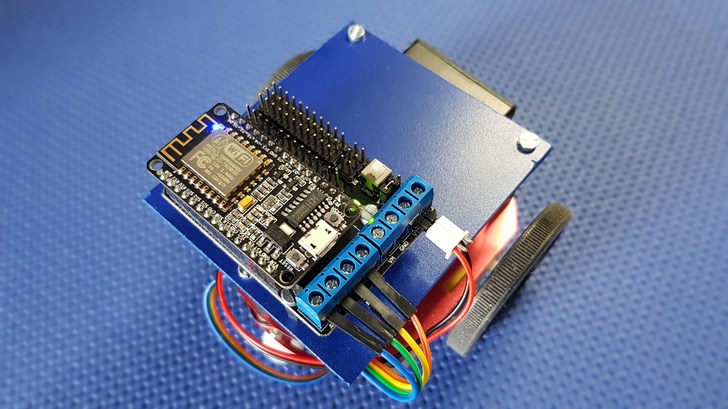
Vediamo ora come realizzare un piccolo robot che potrà essere comandato tramite uno smartphone collegato tramite Wi-Fi alla scheda NodeMCU, per fare questo abbiamo bisogno di:
 |
 |
| NodeMcu esp8266 con motorshield, | Piattaforma robot come per esempio la Feetech FT-002 |
 |
|
| Porta battere con due batterie Li-Ion 3,7V tipo ICR18650 |
Per le descrizione potrete vedere il seguenti link: Base per NodeMcu, robot Feetech FT-002, Porta batterie, sotto è riportato il semplice schema di collegamento
.jpg)
.jpg)
.jpg)
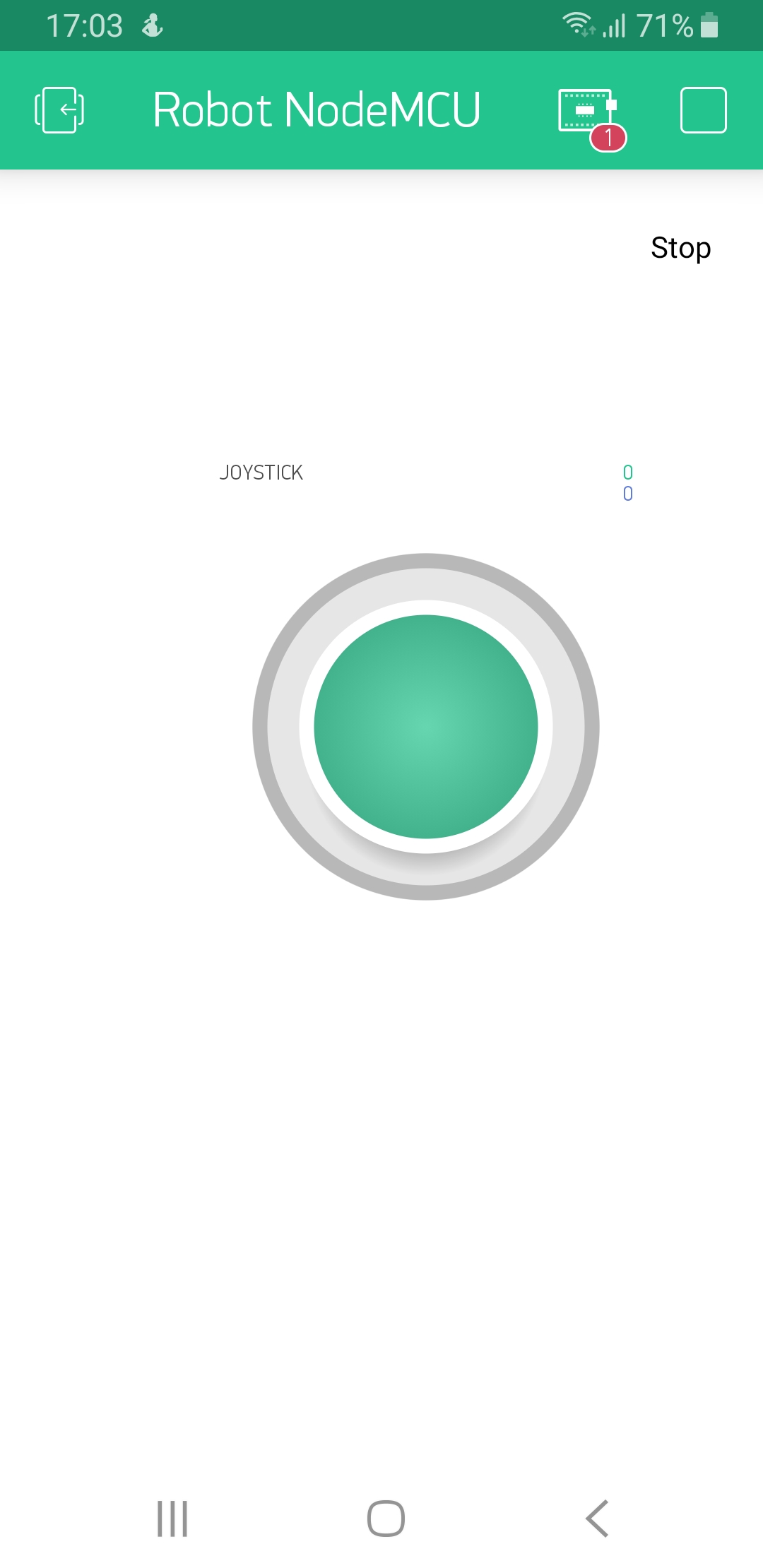
Per la gestione del robot si è utilizzata
l'applicazione
Blynk, disponibile sia per iOS e Android, l'applicazione è gratuita, chi non
l'avesse mai utilizzata dovrà scaricarla e dopo essersi registrato si potrà
utilizzarla.
Per il nostro robot utilizzeremo un semplice joystick virtuale, e lo
imposteremo per lavorare con i pin virtuali.
Valori per entrambi gli assi da
(-1) a 1.
 |
 |
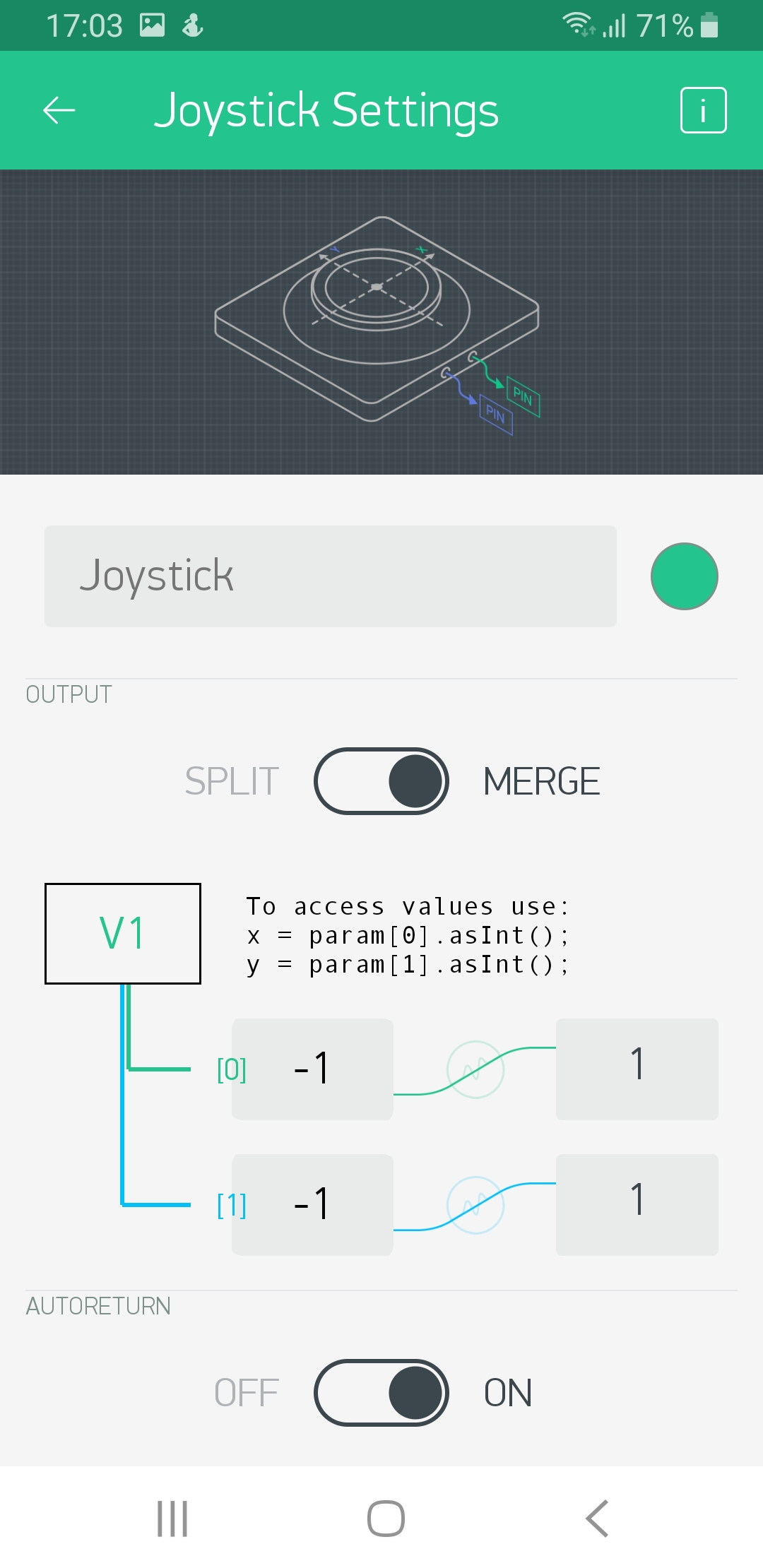 |
Il codice Esp è basato sul progetto Blynk predefinito per la
gestione dei dati dal joystick al pin-1 virtuale. a seconda del dato ricevuto
tramite una serie di IF sono eseguiti i comandi per l'attivazione dei motori.
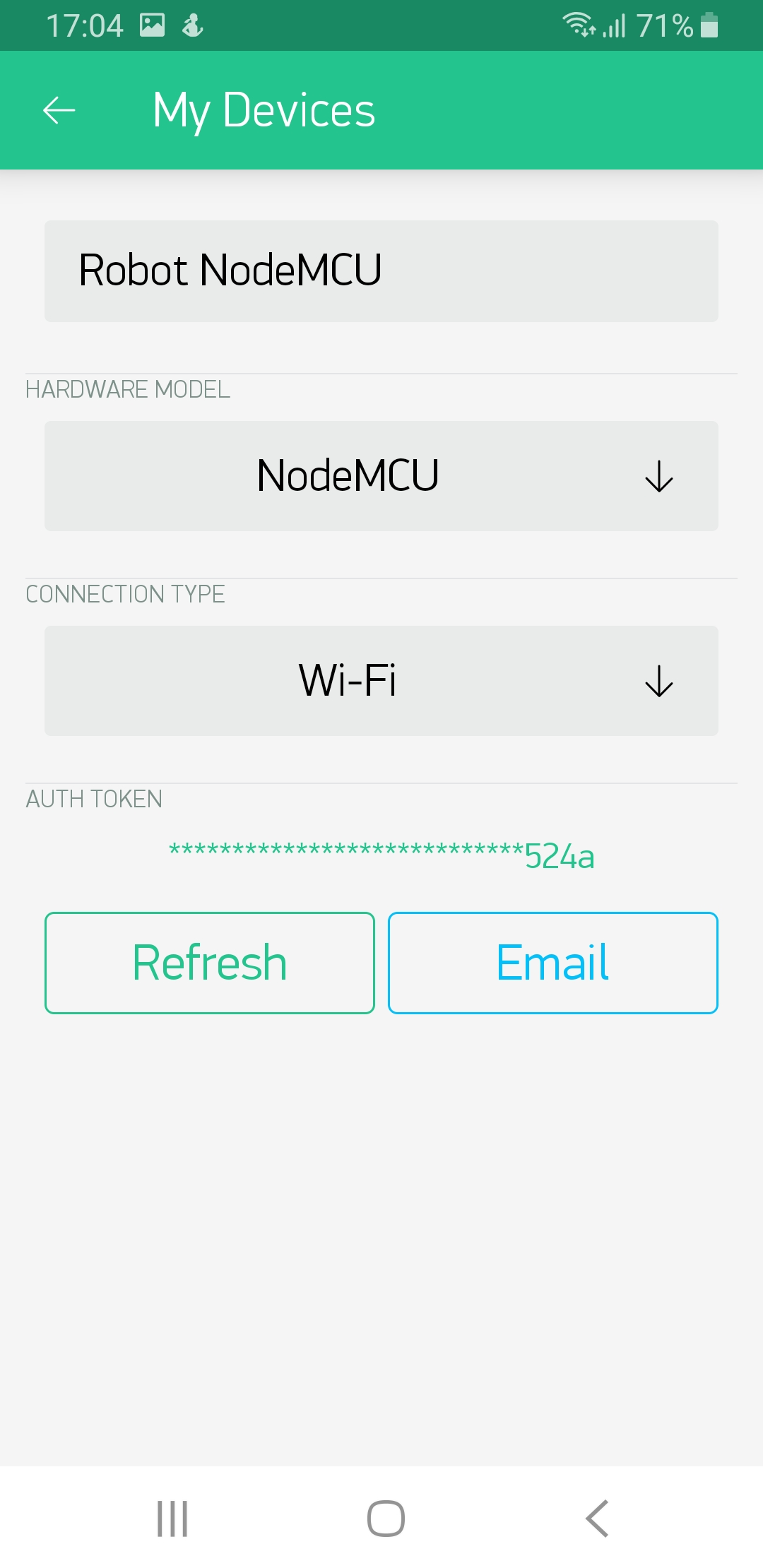
Per il funzionamento del programma occorre inserire nel programma tre
informazioni:
char auth[] = "YourAuthToken"; Inserire il codice fornito tramite e-mail dlal'applicazione
char ssid[] = "YourNetworkName";
Inserire il nome della rete a cui è collegato lo smartphone e i robot
char pass[] = "YourPassword";
Inserire la password di accesso alla rete.
|
| Elenco revisioni: | |
|
23/08/2020 |
Aggiornato pagina, inserito test led |
|
26/05/2019 |
Aggiornato pagina |
|
26/08/2018 |
Emissione preliminare |