Modulo relè LX206
ultimo aggiornamento il 2 aprile 2022
|
Modulo relè LX206 ultimo aggiornamento il 2 aprile 2022 |
|
|
|
PRESENTAZIONE
Il modulo relè qui descritto era venduto in kit di montaggio
dalla rivista
Nuova Elettronica, il progetto venne presentato sul numero
50/51 pubblicato nel febbraio/marzo del 1977.
Si tratta di un semplice circuito di comando di un relè che
può essere pilotato direttamente da un integrato a logica TTL (acronimo di
Transistor-Transistor Logic) oppure tramite una delle
molte schede di controllo come:
Arduino,
Raspberry,
Basic Stamp,
CB220,
ect
 |
|
|
 |
|
Arduino |
Raspberry |
Basic Stamp |
CB220 |
Nota : la descrizione del
funzionamento è tratto dalla rivista

Altri modelli di moduli relè
 |
 |
 |
|
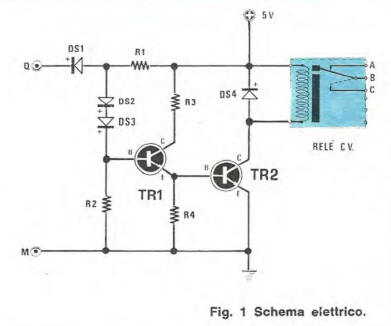
SCHEMA ELETTRICO DEL MODULO LX206
Lo schema elettrico di questo circuito di comando per relè è molto semplice ed è visibile in fig. 1.
|
|
|
||||||||||||||||||
| 1N4148 - Fast switching diode | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
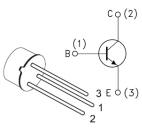
| Transistor NPN BC107-208 LOW NOISE GENERAL PURPOSE AUDIO AMPLIFIERS | ||
|
 |
 |
| Piedinatura | Datasheet | Foto del transistor |
| Transistor NPN 2N1711 come amplificatore ad alta prestazione, oscillatore e circuiti di commutazione | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del transistor |
Il segnale di comando deve essere applicato
all'ingresso Q, cioè al catodo di DS1.
Quando questo catodo è collegato a massa, cioè quando sull'uscita del TTL vi è
tensione nulla (o state logico 0, come preterite chiamarlo), nel punto comune
agli anodi di DS1-DS2 e alla resistenza R1, misureremo una tensione di circa
0,8-0,9 volt, pari appunto alla caduta di tensione che si riscontra ai capi di
un diodo al silicio (DS1) quando è polarizzato direttamente, più la piccola
tensione sempre presente sull'uscita di quest' integrati anche quando la stessa
si trova in stato logico 0.
Questa tensione, a causa della presenza dei diodi DS2-DS3, non e sufficiente a
polarizzare la base del transistor TR1, il quale rimarrà quindi interdetto e
cosi dicasi pure per TR2.
In queste condizioni avremo quindi il relè diseccitato.
Supponiamo invece adesso che sul catodo di DS1 sia presente una tensione
positiva superiore a 1,8 volt.
In tal case la corrente riuscirà a fluire lungo i diodi DS2 e DS3 per andare ad
alimentare la base di TR1 e di conseguenza quella di TR2. Lo stesso TR2 si
porterà quindi in conduzione, causando I'eccitazione della bobina del relè
collegata al suo collettore.
Questo relè è del tipo a 6 volt ma funziona egregiamente anche con i 5 volt
normalmente utilizzati per alimentare i circuiti TTL e che come noterete
sfrutteremo per alimentare anche il nostro circuito di comando. I contatti del
relè utilizzato possono sopportare una corrente massima di 1 ampere che con
la tensione di rete a 220 volt corrispondono a una potenza di circa 220 watt;
qualora tuttavia si avesse necessita di una corrente maggiore, si potrà sempre
sostituire questo relè con un altro dotato di contatti più "robusti" purché
risulti possibile eccitare la bobina di quest'ultimo con 5 volt.
Prima di concludere, una piccola precisazione e cioè spiegare ai più inesperti perché abbiamo detto
che per ottenere I'eccitazione
del relè, la tensione sul catodo di DS1 deve risultare superiore a 1,8 volt.
A questo proposito basterà notare che quando entrambi i transistor sono in
conduzione, la tensione sull'anodo di DS1 e data da:
- caduta ai capi di DS2 (circa 0,6 volt)
+ caduta ai capi di DS3 (circa 0,6
volt)
+ tensione base-emettitore di TR1 (circa 0,6 volt)
+ tensione
base-emettitore di TR2 (circa 0.6 volt)
In totale, in questo punto del circuito,
si avranno quindi circa:
0,6 X 4 = 2,4 volt
Pertanto è ovvio che se la tensione in uscita dal TTL non supererà il valore di:
2,4 - 0,6 = 1,8 volt
dove con 0,6 si è indicata la caduta ai capi di DS1 nel caso in cui questo sia
attraversato dalla corrente, sull'anodo di DS1 stesso avremo sempre una tensione
troppo bassa per portare in conduzione i due transistor.
REALIZZAZIONE PRATICA
Per realizzare questo circuito di comando per relè potrete si potrà realizzare un circuito stampo, oppure montare il tutto su una basetta millefori
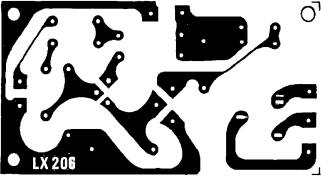
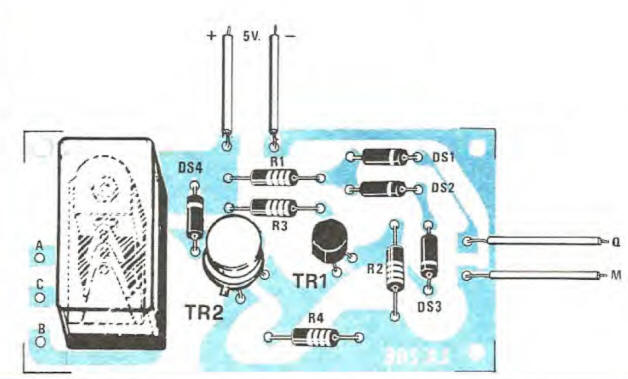
Il montaggio dei componenti non presenta alcuna difficoltà: basterà infatti
rispettare la polarità dei quattro diodi al silicio e individuare i tre
terminali dei transistor prima di inserirli negli appositi fori per avere la
certezza di ottenere un perfetto funzionamento.
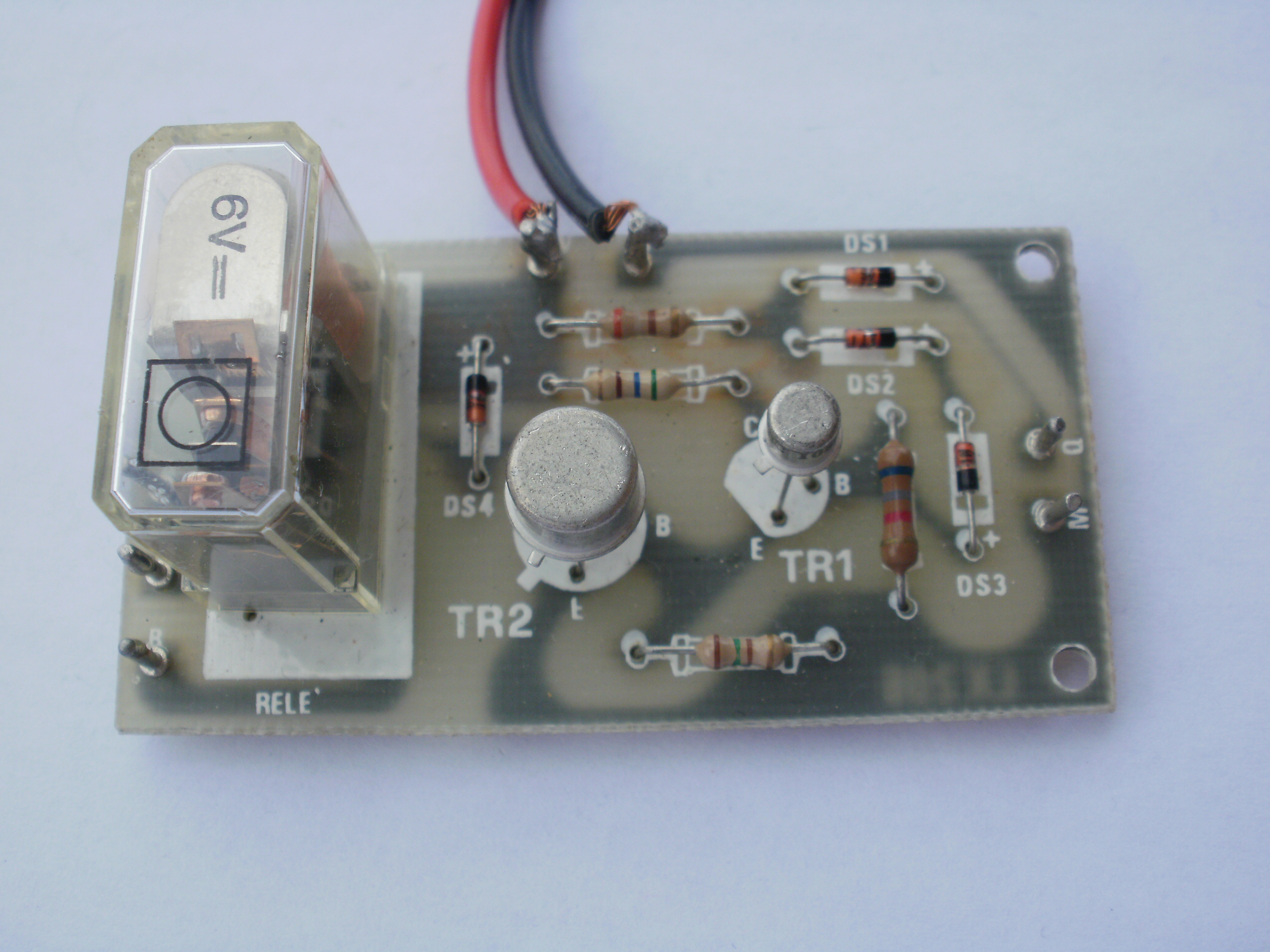
A proposito dei due transistor, questi non risultano assolutamente critici: per
TR1 potremo ad esempio utilizzare un NPN di bassa potenza tipo
BC107-BC208 o similari, mentre per TR2 dovremo scegliere un transistor di
media potenza tipo il 2N1711, il relè visibile
nelle foto risulta essere a 6 volt 1 scambio ed i suoi contatti possono
sopportare, come già anticipato, una corrente massima di 1 ampere.
Se questo non fosse sufficiente per i vostri scopi, ad esempio se volete
pilotare un carico da 500 watt, e ovvio che dovrete sostituire tale relè con un
altro, sempre a 6 volt, in possesso delle caratteristiche richieste.
In tal caso però dovrete collegare i terminali delta bobina allo stampato
mediante degli spezzoni di filo di rame.
Sulla sinistra dello stampato, accanto al relè troverete tre terminal!
contrassegnati con le lettere A-B-C, mentre sulla destra ne troverete due
indicati con le lettere Q ed M.
I primi tre sono quelli che fanno capo ai contatti del relè, quindi li
sfrutteremo per pilotare il carico, mentre gli ultimi due sono quelli che
dovremo collegare al circuito TTL per prelevare gli impulsi di comando.
In
particolare il terminale Q dovrà essere collegato alla porta di comando mentre il terminate M dovrà
essere collegato alla massa sempre del circuito TTL.
Dei tre contatti A-B-C, ricorderemo che B e il centrale, A quello normalmente
chiuso e C quello normalmente aperto.
Supponendo quindi che si voglia interrompere il funzionamento di un motore
quando sull'ingresso Q è presente uno stato logico 1, dovremo collegare in serie
all'alimentazione del motore stesso i terminali A e B. Se invece vogliamo che il
motore si metta in funzione quando sull'ingresso Q compare uno stato logico 1,
dovremo collegare in serie all'alimentazione del motore i terminali B e C.
Come ultimo avvertimento ricordiamo che I'alimentazione per questo circuito può
essere prelevata direttamente dal circuito TTL pilota in quanto il suo
assorbimento, a relè eccitato, risulta di circa 80 mA e non è certo tale da
richiedere un alimentatore separato.
 |
 |
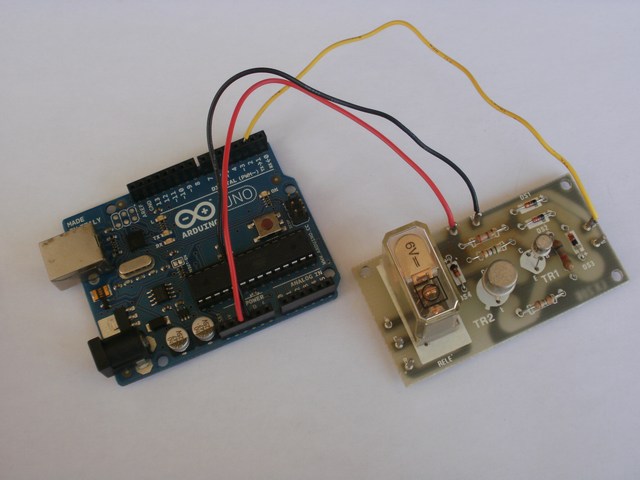
Utilizzo del modulo con la scheda Arduino
Per pilotare il relè è possibile utilizzare la scheda Arduino UNO
che tramite una delle porte logiche fornice un livello di tensione a livello TTL
come richiesto.
Vista la bassa corrente richiesta dal circuito LX206, pari a 80 mA, questa potrà
essere prelevata direttamente dalla scheda Arduino, per cui sarà sufficiente
collegare i pin: +5V, GND, e la porta D2 al modulo, quindi una volta caricato il
programma, vedremo accendersi il led presente sulla scheda Arduino e
contemporaneamente sentiremo il relè eccitarsi, dopo un secondo il led si
spegnerà e il relè si disecciterà, quindi il ciclo riprenderà.
 |
 |

Programma test
|
|
| Elenco revisioni: | |
|
2/4/2022 |
Aggiornato pagina |
|
26/6/2016 |
Emissione preliminare |