
ultimo aggiornamento 17 luglio 2008
|
ultimo aggiornamento 17 luglio 2008 |
|
|
|
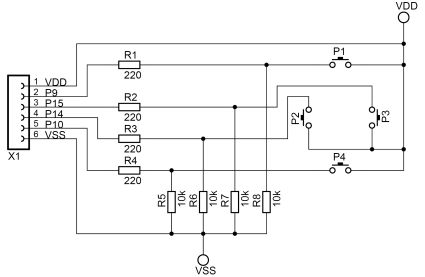
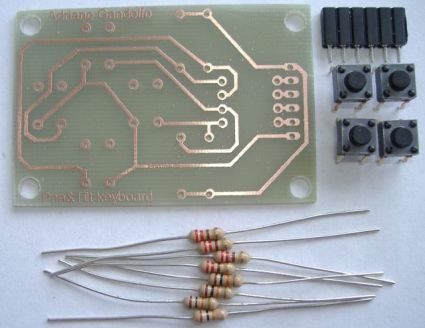
| Tastiera di controllo. Per il controllo dei due servomotori si può utilizzare una piccola tastiera il cui schema elettrico è riportato sotto, mentre l’elenco dei componenti è nella tabella a fianco. Lo schema è molto semplice: sono presenti 4 tasti connessi ognuno ad una resistenza da 10KΏ e una da 220 Ώ a sua volta connessi ad una porta del processore. |
|

|
Schema elettrico
|
||||||||||||
|
|
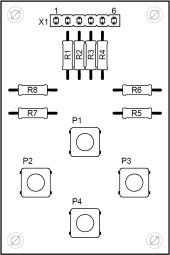
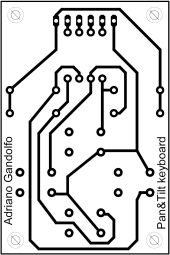
Per la sua costruzione è necessario realizzare il circuito stampato con il metodo della fotoincisione o del trasferimento termico. Una volta pronto si potrà passare alla saldatura dei componenti seguendo il disegno della disposizione dei componenti. Si inizierà dalle resistenze, proseguendo con i pulsanti e da ultimo si salderà il connettore X1.
Collegamento alla scheda di controllo
Si potrà passare quindi, al collegamento della scheda di controllo.
Questa potrà essere la
DeA Basic Stamp Board, prodotta dalla
Parallax per la DeAgostini ed utilizzata per il robot Panettone, oppure la
nuova Board of Education (BOE).
Per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda possono utilizzare la nuova scheda della Parallax denominata Scheda USB BoE +chip BS2 + Kit con la possibilità di collegamento tramite USB, la potete trovare sul sito della Essegi Elettronica srl www.homotix.com codice 28803 al costo di 72 € (IVA e trasporto escluso.)
|
|---|
|
Per il collegamento dei due servomotori e
della tastiera si seguirà lo schema riportato sotto.
|
||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Listato del programma. Per la gestione dei due servomotori tramite la tastiera è necessario utilizzare il programma riportato nel Listato 1. Questo verifica la pressione dei tasti e, in base a quello selezionato, incrementa o decrementa una variabile per il comando PULSOUT. A seconda del suo valore il servomotore ruoterà a destra o sinistra. All’accensione il programma invia il valore duration_pan e duration_tilt che servono per centrare la telecamera, variare questi valori per ottenere la perfetta centratura. Variando il valore passo, invece,si potrà variare di quanto si sposta la telecamera ad ogni pressione del tasto. Per la compilazione e il trasferimento del programma si utilizzerà l’apposito Editor scaricabile gratuitamente dal sito della Parallax. |
|
|---|
Riferimenti utili
http://www.parallax.com/
Sito del produttore della scheda di comando.
| Elenco revisioni | |
| 17/07/2008 | Emissione preliminare |