Braccio
ultimo aggiornamento 9 luglio 2007
|
Braccio ultimo aggiornamento 9 luglio 2007 |
|
|
|
|
Per la costruzione del braccio sono necessari
i particolari allegati ai fascicoli 79, 80 e dal numero 88 al 92. Questi comprendono 2 motori elettrici: uno necessario per la salita e discesa della pinza mentre l'altro serve per l'apertura e chiusura della pinza entrambi sono controllati dalla scheda controllo braccio. |
 |
| Fascicolo n°79 | Fascicolo n°80 | Fascicolo n°88 | Fascicolo n°89 |
 |
 |
 |
 |
 |
 |
 |
 |
|
1 supporto per il
braccio |
1 motore con
pignone |
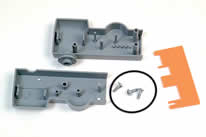
1 set di pezzi per il telaio del motore 2 viti |
1 trasmissione del motore |






1 coperchio posteriore del robot
1 coperchio inferiore del braccio
1 coperchio superiore del bracco
1 cinghia di trasmissione
3 viti
1 Motore
1 Condensatore ceramico da 470nF
1 Cavetto 2 pin connettore femmina
1 cremagliera
1 gruppo di tre ingranaggi del braccio
Fasi di costruzione motore per
movimento alto-basso Pinza
|
|---|
| Elenco revisioni: | |
| 09/07/2007 | Aggiornato pagina, inserito link PDF montaggio |
| 16/06/2006 | Aggiornato pagina |
| 08/06/2005 | Emissione preliminare |