Scheda controllo braccio
ultimo aggiornamento 9 luglio 2007
|
Scheda controllo braccio ultimo aggiornamento 9 luglio 2007 |
|
|
|
|
La scheda
di controllo braccio del
robot
Pathfinder permette il pilotaggio di due motori DC, il promo aziona
il "gomito" e il secondo la "pinza". |
|
|
 File PDF LABORATORIO PRATICO |
File PDF ESERCIZI PRATICI |
|

|
|---|
|
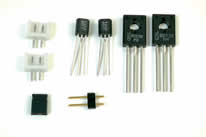
Fascicolo n° 81 1 Circuito stampato scheda Pinza RV505r5 1 Cavo da cablaggio 8 cm marrone |
Fascicolo n° 82 4 Res. 4K7ohm ¼ W 5 Res. 10K ohm ¼ W 1 Res. 8,2 ohm ¼ W 4 Condensatore 470nf |
|
Fascicolo n° 83 2 Res. 1K ohm ¼ W 2 Transistor BD135 2 Transistor BC548 o BC547 |
Fascicolo n°84 1 Condensatore 100n 1 Condensatore Elettrolitico 100uF 2 Transistor BD136 2 Transistor BC558 o BC557 |
|
Fascicolo n° 85 1 Connettore 14X2 2 Transistor BD135 2 Transistor BC548 o BC547 1 Zoccolo per PIC 8 pin |
Fascicolo n° 86 2 Connettore Maschio 2 poli per c.s. 2 Transistor BD136 2 Transistor BC558 o BC557 1 Jumper 1 Chiudi jumper |
|
Fascicolo n° 87 1 PIC PIC 12C508A Programmato |
 |
 |
 |
 |
Schema elettrico della scheda
|
|
||||||||||||||||||||||||||||||||||
| Transistor PNP BC558 | ||
  |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
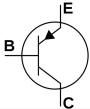
| Transistor PNP BD136 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
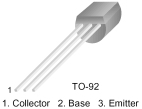
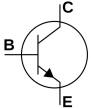
| Transistor NPN BC548 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
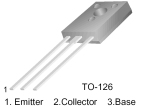
| Transistor NPN BD135 | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
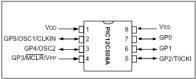
| Processore PIC12C508A | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del processore |
 |
Analizzeremo ora l'ultima scheda di
Pathfinder, la scheda di controllo del braccio. |
||||||||||||||||
 |
Nell'immagine possiamo vedere la prima parte dello schema della scheda di
controllo del braccio. |
||||||||||||||||
 |
L’ultimo motore di cui è composto Pathfinder è il motore di controllo del
movimento di apertura e chiusura della pinza. Per questo lavoro, è
necessario un nuovo ponte ad H sulla scheda di controllo del braccio.
Tuttavia, questo ponte non sarà gestito dal microcontroller principale,
poiché i segnali di controllo che vanno alla base dei transistor arrivano da un microcontroller specifico modello PIC12C508. |
||||||||||||||||
 |
In questo altro schema possiamo vedere il ponte ad H di controllo per il
motore della pinza collegato con il microcontroller dedicato PIC12C508. Abbiamo un jumper JP2 mediante il quale possiamo selezionare i due modi di funzionamento per la pinza. Un modo sarà quello temporizzato, in cui la pinza eseguirà un movimento di chiusura e di apertura automatico. La seconda opzione ci permetterà di controllare, a nostra scelta, sia l'apertura che la chiusura della pinza con segnali che arrivano dal microcontroller principale della scheda di controllo. Riassumendo mediante i segnali RB6 e RB7 del microcontroller, gestiremo il movimento necessario per alzare e abbassare il braccio. Tramite il segnale RA3 invieremo ordini al microcontroller dedicato PIC12C508 che ha il compito di controllare l'apertura e la chiusura della pinza nei suoi due modi di funzionamento. Possiamo notare come i due motori del braccio prendano l'alimentazione direttamente dell'alimentatore, allo stesso modo dei motori delle ruote e delle zampe . |
||||||||||||||||
 |
|
||||||||||||||||
 |
La scheda di controllo del braccio verrà inserita sul connettore femmina JP15 della scheda di interfaccia di Pathfinder, con lo stesso orientamento mostrato dall'immagine. | ||||||||||||||||
 |
Continuiamo l'analisi della scheda di controllo del braccio. In questa immagine possiamo vedere il microcontroller PIC12C508. Si tratta di un microcontroller OTP (One Time Programmable), ossia un dispositivo con una memoria programma di tipo PROM (Programmable Read Only Memory) che è programmabile una sola volta, con un programma già scritto che non si può modificare. Questo microcontroller ha una particolarità, non richiede oscillatore esterno, dato che possiede un clock interno da 4 MHz, che è la frequenza di lavoro del microcontroller PIC16F870 della scheda di controllo. Grazie ad esso, dei suoi otto piedini, due sono di alimentazione, i rimanenti si possono utilizzare come pin di ingresso e segnali di uscita. |
||||||||||||||||
 |
Il jumper IP2 della scheda di controllo del braccio, servirà per gestire due
modi di funzionamento. Se il jumper è inserito, il funzionamento della pinza
è temporizzato. Un fronte di salita, inviato tramite il pin RA3 del microcontroller principale, farà in modo che la pinza si chiuda e trascorso un determinato tempo si riapra. Se il jumper è tolto controlleremo il movimento. Mediante un fronte di salita inviato tramite RA3, faremo chiudere la pinza, e con un secondo fronte di salita la pinza si riaprirà. Tutti i movimenti di controllo del motore sono gestiti dal microcontroller PIC12C508. |
||||||||||||||||
 |
In questa immagine possiamo vedere il braccio e la pinza di Pathfinder
montati sul telaio. Il braccio avrà un movimento di salita e discesa fra due posizioni fisse. All'interno del braccio si trova il motore di controllo della pinza e tutto il meccanismo necessario per convertire i movimenti di rotazione del motore in movimento di apertura e chiusura della pinza. |
||||||||||||||||
 |
Il braccio dispone di un motore esterno che servirà per gestire il suo
movimento. Tramite un sistema di ingranaggi, riusciremo ad applicare una riduzione al movimento di rotazione del motore e aumentare la sua copia, in modo da poter muovere il braccio. Sarà necessario un impulso sul motore per sollevarlo e un altro impulso per farlo scendere. Il braccio avrà due posizioni fisse, una con il braccio alzato e l'altra con il braccio in linea orizzontale. |
||||||||||||||||
 |
Questo è il meccanismo di controllo della pinza. Come potete osservare, il movimento del motore è collegato a una serie di corone sino ad arrivare a una cremagliera, che avrà il compito di trasmettere il movimento alla pinza. I movimenti di temporizzazione necessari per l'attivazione di questo meccanismo, li controlla il microcontroller PIC12C508, quindi dovremo solamente inviare gli impulsi tramite il piedino RA3 del microcontroller della scheda di controllo per iniziare il movimento. Gli oggetti da sollevare non potranno essere eccessivamente pesanti, perché in caso contrario, la pinza non riuscirà a sollevarli. |
| Elenco revisioni: | |
| 09/07/2006 | Aggiornato pagina |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 29/06/2005 | Inserito descrizione scheda |
| 08/06/2004 | Emissione preliminare |