Scheda alimentazione
ultimo aggiornamento 9 agosto 2006
|
Scheda alimentazione ultimo aggiornamento 9 agosto 2006 |
|
|
|
| La scheda alimentazione
ha il compito di alimentare il nostro robot in più sono presenti
un connettore per il collegamento tra il robot e il PC tramite un
connettore RJ45 e il connettore per Smart-card che permette di scaricare i
programmi nel processore del robot.
Sulla scheda è inoltre presente un connettore per il collegamento della telecamera Questa scheda viene assemblata con i componenti allegati ai fascicoli dal n° 13 al n° 16 |
 |
||
 File PDF LABORATORIO PRATICO ALIMENTAZIONE |
File PDF LABORATORIO PRATICO SMARTCARD |
 File PDF COSTRUZIONE DEL PATHFINDER |
|








1 Circuito stampato scheda alimentazione
RV501r4/3
1 Porta fusibile (composto da 2 pezzi)
1 Res. 560 ohm
1 Led rosso 3mm
1 Fusibile 2 A max
2 Connettori maschio 2 poli per c.s.
1 Connettori maschio 3 poli per c.s.
2 Connettori maschio 4 poli per c.s.
1 Cavetto 15 cm 4 pin connettori Femmina
1 Connettore jack femmina per alimentazione
da c.s.
1 Commutatore da c.s. 2 vie
1 Connettore RJ45 (tipo plug Connettore rete)
1 Connettore Smart Card
 |
|
|---|
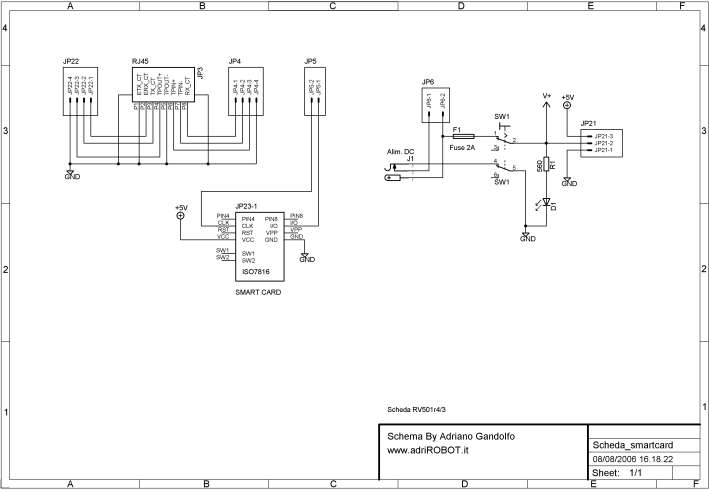
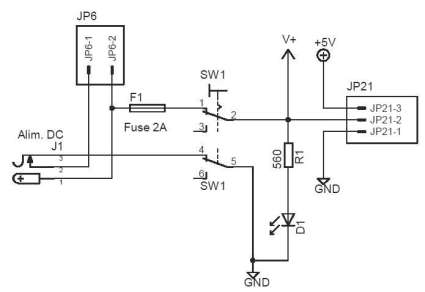
| Schema elettrico della scheda |
 |
 |
 |
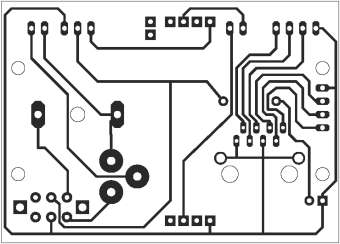
| Piste lato rame (il disegno in scala 1:1 è nel file PDF) |
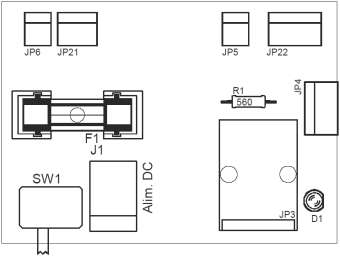
Disposizione componenti |
Schema elettrico della scheda
|
|---|
|
|
|
||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
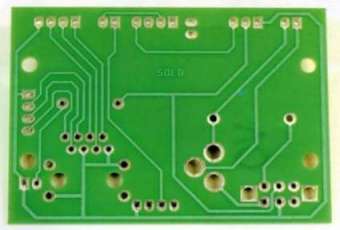 |
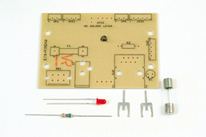
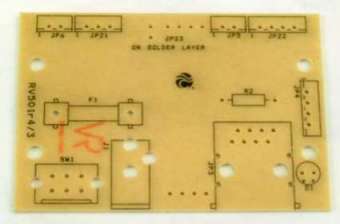
| Foto del circuito stampato codice RV501r4/3 | |
|
|
 |
|
|
Questa è la prima parte dello schema della scheda di alimentazione. |
|
 |
|
|
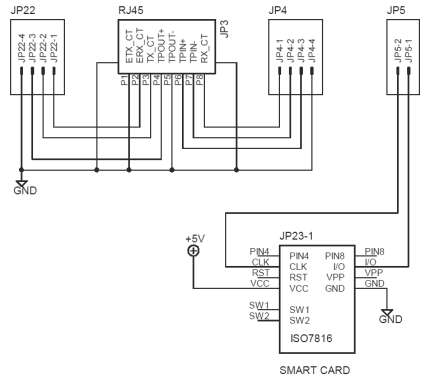
Questa è la seconda parte dello schema della scheda di alimentazione. |
|
|
Collaudo Verifichiamo ora di aver realizzato il montaggio
in modo corretto, al fine di controllare l'eventuale presenza di cortocircuiti sulla scheda. |
| Elenco revisioni | |
| 09/08/2006 | Aggiornato pagina con inserimento disegno circuito stampato. |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 10/06/2005 | Aggiornato pagina |
| 14/09/2004 | Emissione preliminare |