|
|

|
|
Montaggio della base del collo alla sciarpa utilizzando l'apposita rondella |
|

|
|
Ecco i particolari assemblati |
|

|
|
Altoparlante, il suo supporto e la sua copertura anteriore allegati al fascicolo 55 |
|
|
|

|
|
Assemblaggio dei particolari all'interno del semibusto mediante delle viti M2x6mm |
|

|
|
Inserimento del supporto dell'altoparlante all'interno del busto. |
|

|
|
Montaggio dell'altoparlante |
|
|
|

|
|
Il collo assemblato, il servomotore e il cavo per la scheda di riconoscimento |
|

|
|
Montaggio dei particolari |
|

|
|
Cavo con l'interruttore allegato al fascicolo 57. |
|
|
|

|
|
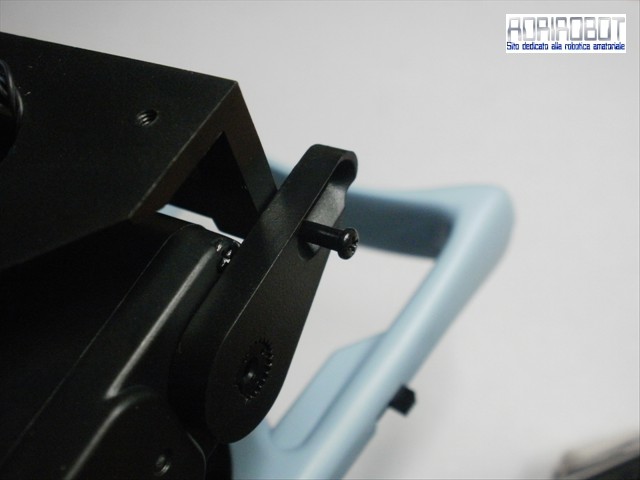
Montaggio del cavetto fissando poi l'interruttore mediante 2 viti M2x4,5mm |
|

|
|
Dettaglio dell'interuttore di accensione del robot |
|

|
|
Assemblaggio del busto e del collo |
|
|
|

|
|
Dettaglio del montaggio |
|
|

|
|
La scheda CPU |
|
|
|

|
|
Fissaggio della scheda CPU all'interno del busto mediante 2 viti |
|

|
|
Collegamento dei cavi alla scheda CPU |
|

|
|
Vista parziale del montaggio |
|
|
|

|
|
Corona del servomotore, la placca del collo e viti |
|

|
|
Dettaglio dei particolari da montare |
|

|
|
I due particolari montati |
|
|
|

|
|
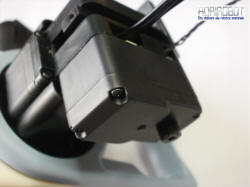
Il servo motore del busto |
|

|
|
Fissaggio della placca mediante la vite M2x6,8mm |
|

|
|
Nuovi collegamenti alla scheda CPU |
|
|
|

|
|
Batteria e scheda distribuzione del robot |
|

|
|
Il supporto del servo del collo, 2 viti m1.7x24mm e una vite M2x6mm allegati al fascicolo 59 |
|

|
|
Fissaggio del servo motore con le due viti M1,7x24 al supporto |
|
|
|
|
|
Si avvita ora la vite M2x6mm |
|

|
|
Leva per il collo, la ghiera filettata e una vite M3x8mm allegati al fascicolo 59 |
|

|
|
Montaggio dei particolari |
|
|
|

|
|
I due pezzi di velluto con funzione di antiscivolo allegati al fascicolo 59 vengono attaccati ai piedi del robot. |
|

|
|
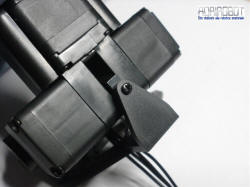
Il servo allegato al fascicolo 60 |
|
|
|
Fissaggio dei servo al supporto del collo |
|
|
|

|
|
Nuovo servo |
|

|
|
Montaggio al relativo supporto |
|

|
|
La corona per l'oscillazione laterale del collo allegata al fascicolo 61 |
|
|
|

|
|
La corona fissata al servo |
|

|
|
La corona per la rotazione verticale del collo allegata al fascicolo 61 |
|

|
|
Montaggio della corona sul servomotore |
|
|
|

|
|
Fissaggio alla leva mediante due viti M2x6mm |
|

|
|
La base della testa e due viti M2x6,2mm |
|
|
|
La prima delle due viti |
|
|
|

|
|
La seconda vite |
|

|
|
La vite M2x12 sulla corona |
|

|
|
I particolari della testa del robot, smontando la versione preliminare, seguendo le istruzioni del fascicolo 62 |
|
|
|

|
|
Montaggio dagli occhi, inserendo un pezzo di adesivo argentato a copertura del foro delle viti |
|

|
|
Dettaglio dellla parte esterna dell'occchio |
|

|
|
Si recupera ora il sensore di movimento e i suoi 2 supporti allegati al fascicolo 62 |
|
|
|

|
|
Dettaglio del sensore di movimento |
|

|
|
Due viti M2x5mm |
|
|
|
Dettaglio dei due occhi montati |
|
|
|

|
|
Le due tempie del robot con relative viti |
|

|
|
Fissaggio delle tempie alla base della testa con le viti M2x4,5mm |
|

|
|
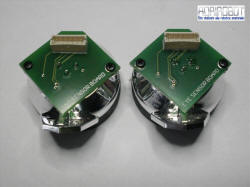
I due occhi con i relativi sensori di movimento e i due cavi di collegamento allegati al fascicolo 64 |
|
|
|

|
|
Connessione dei cavi alla scheda sensore |
|

|
|
La scheda LED per la bocca allegata al fascicolo 65 |
|

|
|
Connessione dei due cavi provenienti dalla schede sensori di movimento alla scheda LED per la bocca |
|
|
|

|
|
Mascherina del viso, la copertura della bocca e due viti |
|

|
|
Inserimento della copertura della bocca nell'apposita fessura della mascherina del viso |
|

|
|
Fissaggio della scheda LED per la bocca con le due viti M5x5mm |
|
|
|

|
|
Dettaglio della scheda LED |
|

|
|
Il cavo di collegamento scheda LED della bocca allegato al fascicolo 66 |
|

|
|
Collegamento del cavo alla scheda LED bocca, il cavo passa nel foro della base della testa |
|
|
|

|
|
Fissaggio degli occhi alla testa del robot |
|

|
|
La scheda di riconoscimento vocale allegata al fascicolo 67 |
|

|
|
Il cavo di collegamento allegato al fascicolo 66 |
|
|
|

|
|
Collegamento del cavo alla scheda |
|

|
|
Fissaggio della scheda di riconoscimento vocale nella testa del robot utilizzando 4 viti di plastica M2x8 allegate al fascicolo 67 |
|

|
|
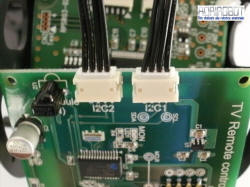
La scheda del telecomando infrarossi allegata al fascicolo 68 |
|
|
|
|
|
Collegamento dei cavi provenienti dalle altre schede |
|

|
|
Fissaggio della scheda utilizzando 4 viti M2x5mm |
|

|
|
Vista della scheda montata |
|
|
|

|
|
La parte inferiore del robot |
|

|
|
Montaggio della vite M2x5mm all'interno del supporto |
|

|
|
Fissaggio della base del busto |
|
|
|

|
|
Unione della parte inferiore e superiore del robot |
|

|
|
Fissaggio delle due parti con 4 viti M2x4,5mm |
|

|
|
Fissaggio della scheda di distribuzione |
|
|
|

|
|
La scheda di distribuzione è fissata con due viti M2x5mm. |
|

|
|
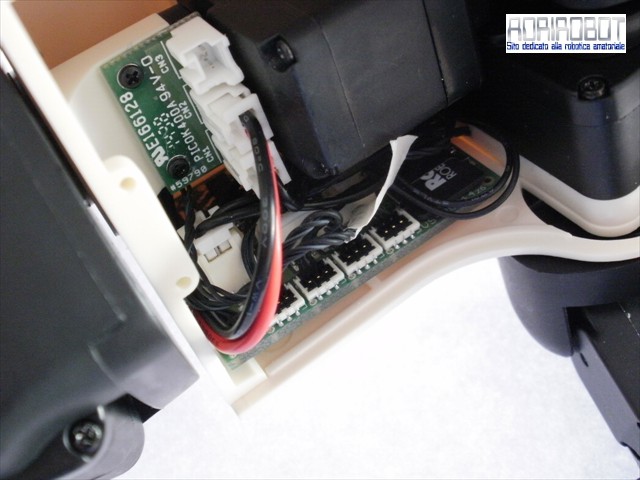
Collegamenti alla scheda di distribuzione |
|

|
|
Collegamento della batteria |
|
|
|

|
|
Si applica il punto rosso in corrispondenza dell'interruttore d'accensione. |
|

|
|
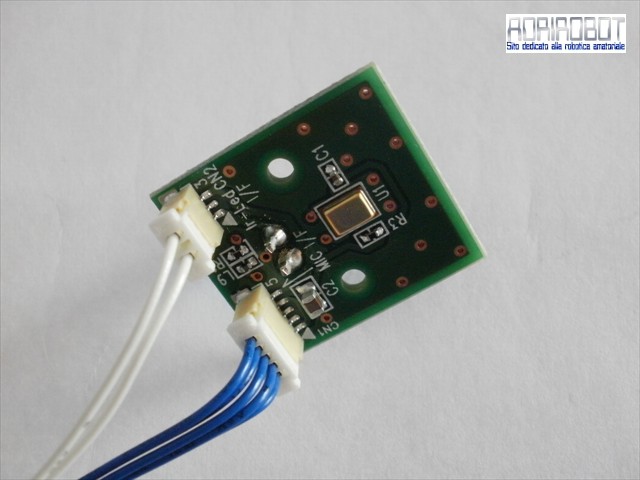
La scheda led infrarosso/microfono e relativi cavi allegati al fascicolo 69. |
|

|
|
Collegamento dei cavi alla scheda led infrarosso/microfono. |
|
|
|

|
|
Il piccolo panno nero, il supporto per la scheda led infrarosso/microfono e le viti allegati al fascicolo 69 |
|

|
|
Inserimento del supporto per scheda nell' apposita fessura del particolare di copertura della fronte con interposizione del panno nero |
|

|
|
Fissaggio della scheda al supporto con 2 vito M2x8 |
|
|
|

|
|
Collegamento dei cavi provenienti dalla scheda LED infrarosso/microfono uno alla scheda riconoscimento vocale e l'altro alla scheda telecomando. |
|

|
|
Situazione del montaggio. |
|

|
|
Montaggio delle orecchie del robot. |
|
|
|

|
|
Montaggio della nuca del robot. |
|

|
|
Le dita del robot allegate al fascicolo 70. |
|

|
|
Montaggio delle dita sulle mani del robot. |
|
|
|

|
|
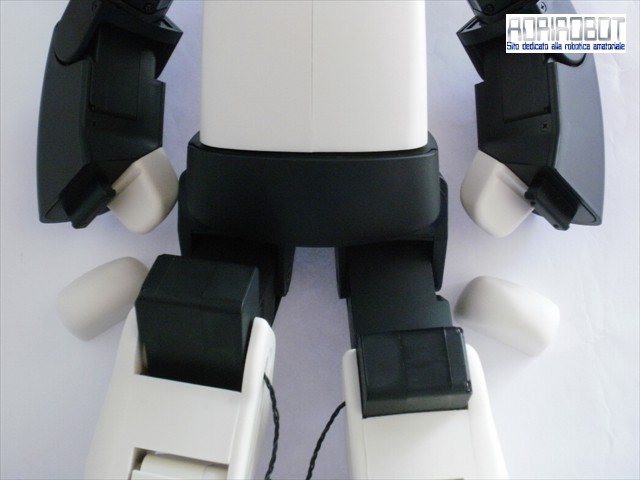
Le due strisce adesive allegate al fascicolo 70. |
|

|
|
Le due strisce sono collocate sui polpacci delle gambe del robot. |
|

|
|
L'operazione di montaggio del robot è conclusa, si passerà ora al collaudo. |
|
|