ultimo aggiornamento il 2 settembre 2010
|
ultimo aggiornamento il 2 settembre 2010 |
|
|
|
Utilizzo
Il modulo permette di pilotare
motori passo-passo del tipo unipolare a 5
fili o 6 fili unendo i due cavi d’alimentazione.
La tensione d’alimentazione
del motore potrà essere compresa tra i 12 e 30 volt con una corrente massima
di 500mA per fase.

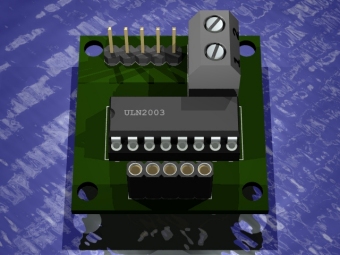
Descrizione
Il modulo per il comando dei motori passo-passo è formato unicamente
dall’integrato IC1 un ULN2003A in cui sono presenti 7 circuiti
darlington.
Il pilotaggio è fornito dalle porte del processore.
Non è necessaria l’alimentazione separata dell’integrato poiché
questo è alimentato
dalla tensione del motore.
|
|---|
 |
|
||||||||||

Circuito stampato e disposizione componenti
 |
 |
| ULN2003AN - Driver 7 canali darlington NPN | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
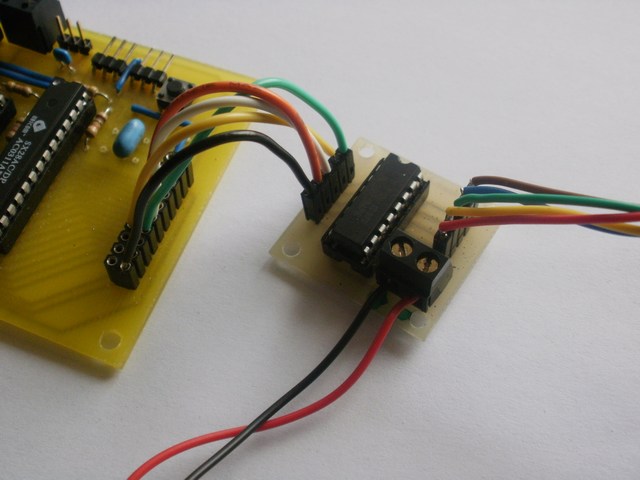
Montaggio e collaudo
Dopo aver realizzato il circuito stampato e aver saldato i componenti si
potrà inserire l’integrato IC1 nell’apposito zoccolo rispettando il
senso d’inserzione.
A questo punto si collegherà il motore e l’alimentazione di quest’ultimo
seguendo il disegno di massima visibile sotto.
Il colore dei cavi del
motore è indicativo, poiché varia da produttore a produttore,
controllare le caratteristiche del motore per individuare le coppie di
cavi e quindi le varie fasi.
Si collegherà quindi il connettore SV1 con il connettore X4, mediante
appositi cavi e si caricherà il programma.
Si noterà che il motore effettuerà una rotazione in un senso e una in
senso inverso.
La pressione del tasto P2 presente sulla scheda di
controllo eseguirà nuovamente il test.
Agendo sulla variabile stpDelay presente all’interno del programma, si
potrà variare la velocità di rotazione.
Modificando la variabile StpsPerRev si modifica il numero dei passi per una rotazione.


 |
 |
|
' {$STAMP BS2sx} ' {$PBASIC 2.5} '************************************* 'Programma:test_modulo_stepper.bsx 'Versione: 1.0 'Collaudo modulo motori passo-passo '************************************* Phase VAR OUTB ' phase control outputs StpsPerRev CON 48 ' totale passi per rotazione idx VAR Byte ' loop counter stpIdx VAR Nib ' step pointer stpDelay VAR Byte ' Ritardo per controllo rotazione tasto VAR IN2 ' Controlla il Pulsante DIRB = %1111 ' make P4..P7 outputs stpDelay = 10 ' Ritardo per step Steps DATA %1010, %1001, %0101, %0110 '************************************* Main: DEBUG CLS,"Inizio test modulo motori passo-passo",CR DEBUG "Rotazione oraria",CR FOR idx = 1 TO StpsPerRev ' una rotazione GOSUB Step_Fwd ' rotazione oraria NEXT PAUSE 500 ' Attesa di 1/2 secondo DEBUG "Rotazione antioraria",CR FOR idx = 1 TO StpsPerRev ' una rotazione GOSUB Step_Rev ' rotazione antioraria NEXT PAUSE 500 'Attesa di 1/2 secondo DEBUG "Premi il tasto sulla scheda per rieseguire",CR attesa: IF tasto=1 THEN attesa GOTO Main END Step_Fwd: stpIdx = stpIdx + 1 // 4 ' un passo in avanti GOTO Do_Step Step_Rev: stpIdx = stpIdx + 3 // 4 ' passo indietro GOTO Do_Step Do_Step: READ (Steps + stpIdx), Phase' Uscita nuovi dati per fasi PAUSE stpDelay ' Pausa tra i passi RETURN |
![]()
Programma TEST_MODULO_stepper.BSX
| Elenco revisioni: | |
| 02/09/2010 | Aggiornato pagina, inserito filmato, possibilità di scaricare file pdf e formato eagle. |
| 04/12/2008 | Emissione preliminare |