
ultimo aggiornamento il 2 settembre 2010
|
ultimo aggiornamento il 2 settembre 2010 |
|
|
|
Caratteristiche e vantaggi dei motori passo a passo
I motori passo-passo sono motori elettrici che offrono un controllo preciso di
rotazione, esso può rotare per ogni passo di circa 0,9-1,8 gradi in ogni direzione
anche ad un'elevata velocità di rotazione.
I motori passo-passo si trovano in diversi tipi di componenti hardware:
stampanti (la testina di stampa si sposta a destra e a sinistra usando un motore
passo-passo), scanner, dischi rigidi di computer, e così via.


Ci sono diverse caratteristiche di motori passo-passo che li ha resi l'attuatore di scelta in un gran numero di applicazioni:
Il dispositivo può essere azionato in anello aperto con una accuratezza di posizionamento di + -1 passo. Se si fa' ruotare di un certo numero di passi, l'elemento meccanico accoppiato al pozzo si muoverà alla distanza richiesta la distanza richiesta.
I motori passo-passo hanno una coppia elevata a basse velocità angolari. Questo è utile per accelerare un carico utile alla massima di velocità.
I motori passo-passo hanno un'elevata coppia di tenuta (Holding torque), questa è la coppia che, con motore alimentato, si oppone alla rotazione. In genere è piuttosto elevata e, anche per motori di piccole dimensioni, questo porta alla proprietà di essere "autobloccante", quando il rotore è fermo.
I motori passo-passo sono direttamente compatibili con le tecniche di controllo digitale, e può essere facilmente interfacciato ad un controllore digitale Step \ Direzione, un microprocessore, o un computer.
La precisione di posizionamento dei motori è eccellente, e ancora più importante, gli errori non sono cumulabili.
La costruzione è semplice e robusta. Di solito ci sono solo due cuscinetti, e il motore ha generalmente una lunga durata senza manutenzione.
Com' è costruito un motore passo-passo ?
|
I motori passo-passo sono costituiti da molte spire poste in forma di cerchio. Quando passa una corrente attraverso una delle bobine questa diventa magnetica (principio elettro-magnetico) e questo sposta l'albero motore nella sua direzione. Un esempio di animazione: |
|
Tipi di motori passo-passo
Ci sono due tipi di motori passo-passo: quelli unipolari (5-6 fili) e quelli bipolari (4 fili), la differenza tra i due tipi è il modo in cui sono connessi gli elettromagneti. Ci sono motori ibridi che possono lavorare sia in modalità unipolare e bipolare, utilizzando i cavi del motore in modo diverso.
Motori passo-passo unipolari: hanno il vantaggio d’essere più facili da controllare, sono così chiamati perché, avendo un doppio avvolgimento, non occorre invertire la polarità di alimentazione. Questi motori si riconoscono perché dal loro corpo escono 5 oppure 6 fil
 Quando dai motori unipolari fuoriescono 6 fili vuol dire che le coppie delle bobine sono provviste di presa centrale |
 Nei motori unipolare da cui fuoriescono 5 fili le bobine A e B sono internamente collegate da una sola presa centrale. |
Bipolari: hanno una maggior potenza specifica (a parità di dimensioni),
ma hanno lo svantaggio che nei due avvolgimenti bisogna far scorrere
corrente sia in un verso sia nell'altro.
Per il loro controllo, si
utilizza un circuito denominato ponte ad H.
I motori bipolari si chiamano così perché, per far ruotare il perno,
occorre invertire la polarità d’alimentazione delle loro bobine secondo
una ben precisa sequenza.
Questi motori si riconoscono perché dal loro corpo escono sempre e solo
4 fili, perché le coppie delle bobine sono sprovviste di presa centrale.
I motori bipolari sono più diffusi perché a parità di potenza hanno
dimensioni minori rispetto agli unipolari, quindi nelle apparecchiature in
cui vi sono problemi di spazio si preferisce i bipolari anziché gli
unipolari.
Controllo di un motore passo-passo
A differenza dei normali motori CC, il controllo dei motori passo-passo è molto
più complessa.
Qui non ci sono solo due fili che hanno bisogno di essere collegati
ad una sorgente di alimentazione, per la rotazione del motore.
Per far ruotare il motore in una certa direzione, deve essere generata una sequenza
di impulsi
Una passo è un passaggio controllato di corrente nelle bobine motori. Quando una bobina è accesa, il
flusso di corrente attraversa l'avvolgimento e questo diventa un elettromagnete.
Viene poi magnetizzata la bobina seguente e si crea la rotazione.
Esempi di schede per azionamento di motori passo-passo
 |
 |
 |
Sequenze di passo
Ci sono 4 tipi di sequenze passo: Full Stepping (chiamato anche Single Stepping), Double Stepping, Half Stepping, e Micro Stepping.
Controllo di un motore Single Stepping
Questo è il metodo più semplice - viene attivata una bobina per volta.
| Bobina 4 | Bobina 3 | Bobina 2 | Bobina 1 | Passo |
 |
| 0 | 0 | 0 | 1 | 1 | |
| 0 | 0 | 1 | 0 | 2 | |
| 0 | 1 | 0 | 0 | 3 | |
| 1 | 0 | 0 | 0 | 4 |
Questa sequenza richiede una minima quantità di energia e genera un movimento fluido.
Controllo di un motore passo-passo utilizzando il metodo"Double-step"
In questo metodo due bobine sono accese contemporaneamente.
| Bobina 4 | Bobina 3 | Bobina 2 | Bobina 1 | Passo |
 |
| 0 | 0 | 1 | 1 | 1 | |
| 0 | 1 | 1 | 0 | 2 | |
| 1 | 1 | 0 | 0 | 3 | |
| 1 | 0 | 0 | 1 | 4 |
Questo metodo non genera un movimento fluido come il per il metodo precedente e richiede il doppio della corrente, ma si ha un raddoppia della coppia.
Controllo di un motore passo-passo con il sistema "Half-Step".
| Bobina 4 | Bobina 3 | Bobina 2 | Bobina 1 | Passo |
 |
| 0 | 0 | 0 | 1 | 1 | |
| 0 | 0 | 1 | 1 | 2 | |
| 0 | 0 | 1 | 0 | 3 | |
| 0 | 1 | 1 | 1 | 4 | |
| 0 | 1 | 0 | 0 | 5 | |
| 1 | 1 | 0 | 0 | 6 | |
| 1 | 0 | 0 | 0 | 7 | |
| 1 | 0 | 0 | 1 | 8 |
Questo metodo raddoppia la
precisione (in gradi) con cui il motore può ruotare Ad esempio, se
un motore può ruotare di 1,8 gradi per ogni passo, usando il metodo Half-Stepping sarà possibile spostare il motore di soli 0,9 gradi / passo.
Lo svantaggio di questo metodo di controllo è il consumo del doppio della
corrente in quanto sono attivate due bobine invece di una.
Determinazione delle coppie di bobine in un motore bipolare
Viene riportato un esempio di
come ricavare le coppie di cavi delle bobine per un motore bipolare di cui non
sono note.
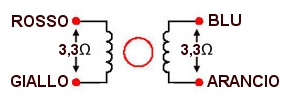
Nel nostro caso il colore dei cavi è: rosso, giallo, blu, arancio.
Si prepara una tabella e mediante un multimetro si procede alla misurazione
della resistenza tra coppie di cavi.
In alcuni casi si avrà valore infinito segno che non sono in collegamento mentre
altre volte si otterrà un basso valore di resistenza segno che è una delle
bobine cercate.
Alla fine delle misurazioni si ricava che una delle bobine fa' capo alla coppia
di cavi rosso e giallo e la seconda alla coppia blu e arancio.

| Rosso | Giallo | Blu | Arancio | |
| Rosso | - | 3,3 Ω | ∞ | ∞ |
| Giallo | 3,3 Ω | - | ∞ | ∞ |
| Blu | ∞ | ∞ | - | 3,3 Ω |
| Arancio | ∞ | ∞ | 3,3 Ω | - |
| Elenco revisioni: | |
| 02/09/2010 | Emissione preliminare |

