![]()

ultimo aggiornamento 7 luglio 2008
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 7 luglio 2008 |
|
|
|
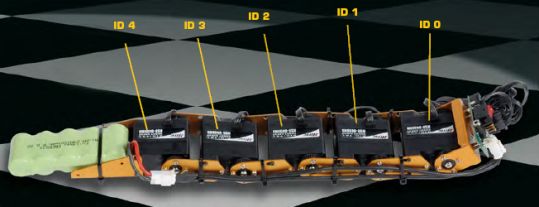
Robosnake "Robotserpente" può essere
realizzato in diverse varianti, a partire da 5 servomotori collegati in
sequenza; grazie ad essi può muoversi 'contraendo' il proprio corpo.
La sua realizzazione comprende i fascicoli dal n°28 al n°36
|
|
|


In particolare le istruzioni di montaggio sono riportate sui fascicoli
N°29 Robosnake: Prima parte
N°30 Robosnake: Seconda parte
N°31 Robosnake: Terza parte
N°32 Robosnake: Quarta parte
N°33 Robosnake:Quinta parte
N°35 Completiamo Robosnake
Programmazione
N°36 Programmiamo Robosnake
| Elenco revisioni | |
| 07/07/2008 | Inserito copertine fascicoli 30 e 36 |
| 10/06/2008 | Inserito copertine fascicoli 28 e 29 |
| 06/05/2008 | Inserito fascicoli da 28 a 31 e scheda tecnica |
| 04/08/2007 | Emissione preliminare |


