![]()

ultimo aggiornamento 16 marzo 2012
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 16 marzo 2012 |
|
|
|
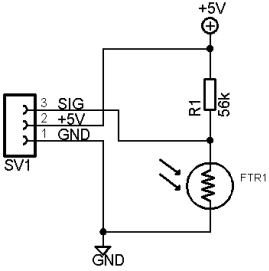
Allegato al fascicolo n°22 troviamo il
primo sensore per il
Robot RoboZak, si tratta di un
sensore di luce, questo è
composto principalmente da una
fotoresistenza
che modifica il suo valore di resistenza al variare della luminosità ambientale
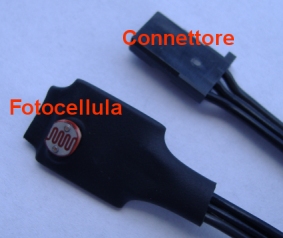
Il sensore è dotato di un
connettore simile a quelli dei
servomotori,
questo andrà inserito nella
scheda di
controllo
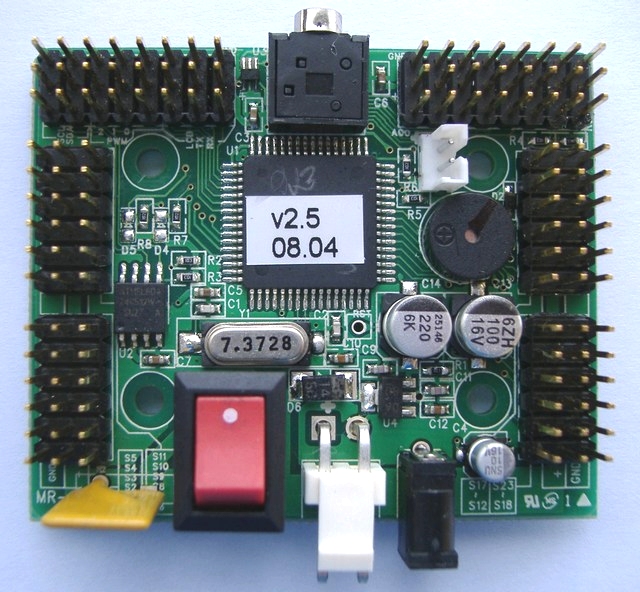
utilizzando gli apposti ingressi analogici, per il controllo si utilizza
la scheda di controllo del
Robot RoboZak
denominata
MR-C3024 dotata di un processore
ATMEL
ATMega 128L con un clock di 7.4MHz, con memoria interna supportata
da una memoria aggiuntiva EEPROM da 64k*8 per Robo-Script e per
programmi Robo-Basic.
|
|
 |
||||||||||||
|
|
||||||||||||

 |
 |
 |
  |
Per un esempio di utilizzo vedere il programma SPIDERLIGHT.BAS riportato nel fascicolo 51
Il programma riportato sotto può essere utilizzato per leggere il valori letti dal sensore

![]()
Programma
Lettura_fotocellula.bas
|
'====================================== |
|
Istruzioni in roboBasic per la lettura e scrittura porte digitali/analogiche
IN p, v
x = AD(p)
OUT p, v |
Altro metodo per la lettura del sensore è quello di utilizzare il programma RZ1 Basic , ecco come fare:
Lanciare il programma RZ1 Basic

impostare la porta COM a cui è collegato RoboZak
se la porta è quella giusta sarà possibile leggere le informazioni dal controller tramite Controller/Controller information
cancellare la memoria programma selezionando da menù Controller/Delete program o cliccando sul relativo pulsante
selezionare Controller/Get controller value per aprire la finestra Various Controller Data
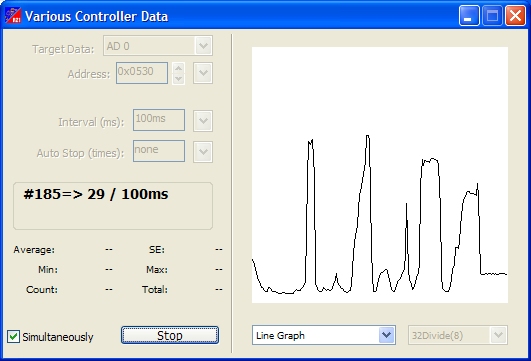
selezionare tramite il menu a discesa Target Data la porta da AD 0/7 a seconda di dove si è collegato il sensore
impostare una lettura da AD ogni 100ms selezionandola dal menù a discesa Interval
cliccare su Start per visualizzare il grafico dei valori letti da AD tramite il sensore di luce
la finestrella piccola indica da sinistra a destra: numero progressivo di letture, valore istantaneo letto (da 0 a 255, riportato nel grafico), intervallo di lettura.

Segnalazione della pagina come argomento caldo del FORUM
| Elenco revisioni | |
| 16/03/2012 | Aggiornato pagina |
| 07/01/2011 | Aggiornato pagina |
| 19/05/2008 | Inserito riferimento alla NEWLETTER n°26 del 15/5/08 di Robozak |
| 06/05/2008 | Emissione preliminare |