![]()


ultimo aggiornamento 5 dicembre 2013
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 5 dicembre 2013 |
|
|
|
|
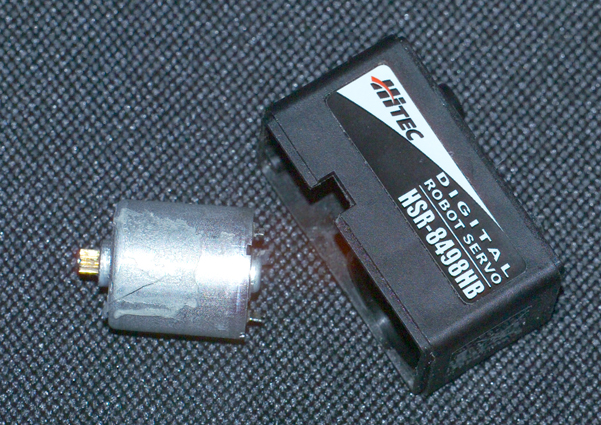
Il robot RoboZak utilizza 18 servomotori digitali Hitec modello HSR-8498HB distribuiti nel seguente modo: 5 per gamba, 4 per braccia (di cui 1 per la pinza se installata). Per il posizionamento vedere immagine.
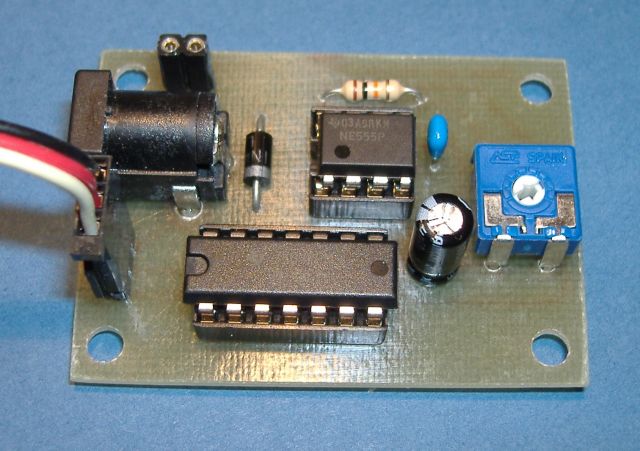
Il modello è denominato HSR-8498HB ed e' stato progettato appositamente per il robot umanoide, presenta delle caratteristiche innovative impossibili da
trovare su altri servi. Per il loro collaudo si potrà usare un semplice circuito progettato da circuito progettato da Fabio Gary.
|
|
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

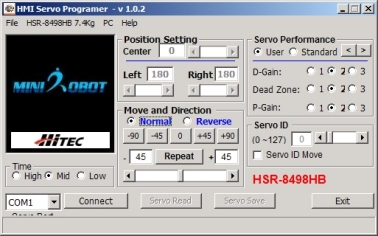
Il Servo Programmer HMI permette la programmazione dei seguenti parametri:
Centro
Estremi della corsa del servo
Direzione
D-Gain (regola l'intensità dello stop del servo)
Dead zone
P-Gain (Velocità e potenza del servo)
Sistema operativo:
Windows XP/Vista
Interfaccia: seriale RS232
Servi Compatibili: HSR V1.10 e successive
Tipologia dei servo utilizzati nel robot
 |
|
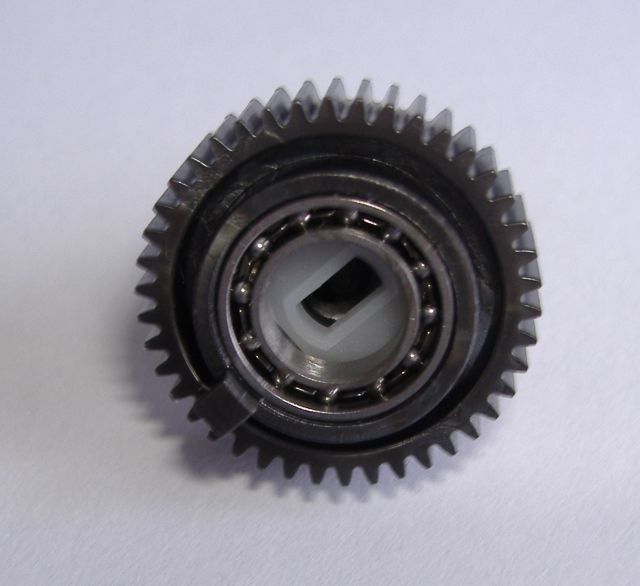
Sono presenti n° 8 servomotori 4N300 tipo A, montati sia nelle braccia che nelle gambe, n°6 servomotori 5N400 Tipo B montati nelle braccia e nei piedi, e infine n° 2 servomotori tipi 6N200 Tipo C montati nelle spalle.
| Tipologie dei motori
Le tre tipologie dei
servomotori sono 6N200, 4N300, 5N400. |
Dimensioni del servo
|
Posizione e tipologia servomotori

|
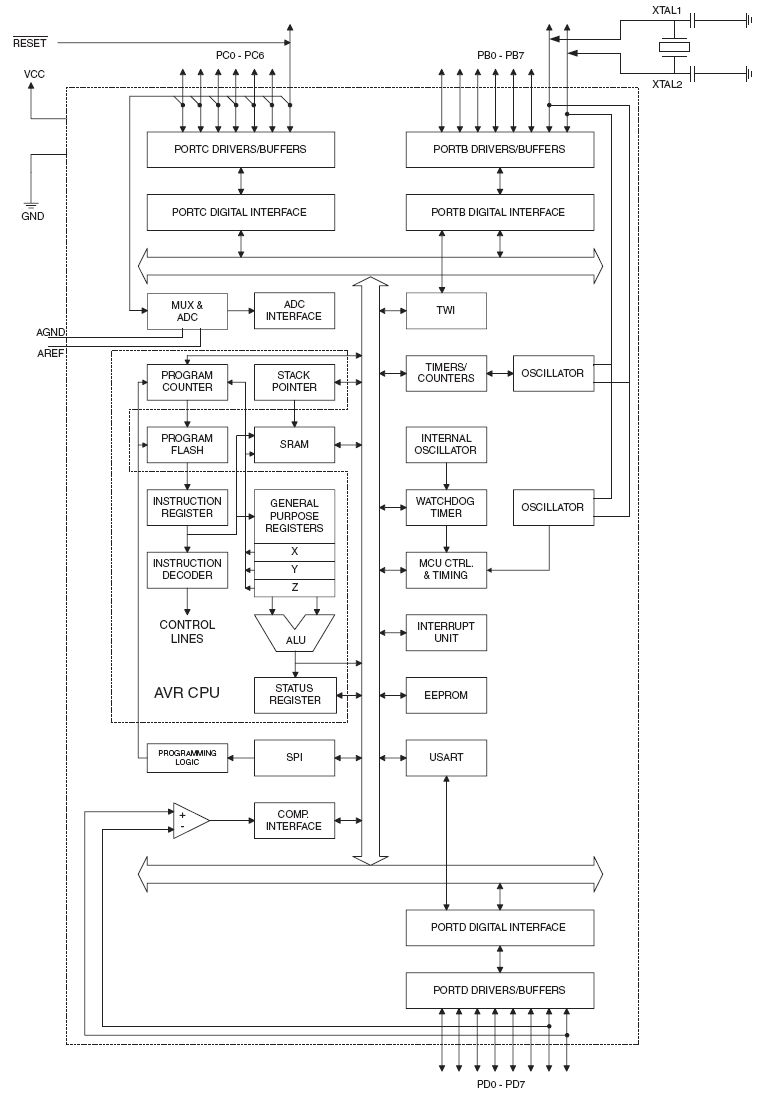
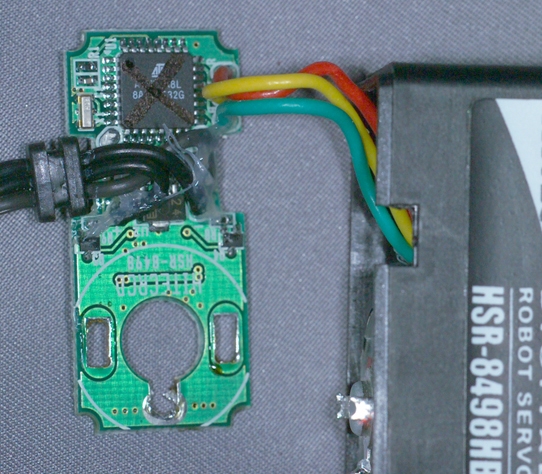
I servo digitali hanno la caratteristica
di possedere al loro interno un microcontrollore Atmel ATmega8L che ha le
seguenti caratteristiche: Con il firmware registrato sul microcontrollore e attraverso un particolare software, fornito nel corso dell'opera, si può collegare il singolo servo al PC e "riprogrammarne" i parametri di funzionamento (senso positivo di rotazione, range di movimento...) tra i quali vi è anche un "servo ID". In pratica è come se il PC, attraverso l'interfaccia provvisoria, inviasse dei pacchetti con scritto "I Servo con ID = 2 si portino in posizione 10"... e ovviamente questi servo risponderanno.
|
|
Dettagli della scheda del servomotore
 |
 |
 |

Schema elettrico della scheda di controllo del
servo
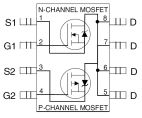
| IRF7389 30V Dual N- and P- Channel HEXFET Power MOSFET in a SO-8 package | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor |
| Processore ATmega8L 8-bit with 8K Bytes In-System Programmable Flash | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Controllo in assenza della Motherboard Prima che venga distribuita la scheda di controllo, viene fornita una interfaccia semplificata che sfrutta la normale porta seriale del PC. Il controllo dei servomotori è possibile grazie al firmware del microcontrollore presente all'interno dei servi Hitec che lavora assieme al programma Roboscript, appositamente modificata per supportare il controllo diretto da PC. Quindi, fino a che non si è in possesso della Motherboard, il PC si occuperà del controllo dei servo sfruttando un protocollo seriale specifico. La scheda di interfacciamento non ha nulla di programmabile né ha bisogno di adattatori di livello tipo MAX232. La comunicazione seriale avviene direttamente tra le linee TX-RX della porta e la linea del segnale di controllo dei servo. I servo digitali, infatti integrano un proprio microcontrollore con un proprio firmware che, nella versione 1.10 creata per RoboZak, è in grado di comunicare su bus seriale attraverso un apposito protocollo. |
|
|
|---|
| Fasi di montaggio | ||||||||
|
| Elenco revisioni | |
| 06/12/2013 | Inserito possibilità di scaricare programma HMI |
| 12/08/2013 | Inserito immagine con posizione servo |
| 06/05/2008 | Inserito tipologie dei vari servo. |
| 03/12/2007 | Inserito foto fasi di montaggio |
| 16/11/2007 | Inserito link per servo tester. |
| 04/08/2007 | Emissione preliminare |