ultimo aggiornamento 19 novembre 2017
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 19 novembre 2017 |
|
|
|
Il servo tester presentato in questa pagina permette di testare i servomotori tipo HSR-8498B utilizzati per la costruzione del robot RoboZak.
|
|
 |
Il progetto si basa sul
circuito
progettato da Fabio Gary
, per il quale è stato realizzato un circuito stampato per il
montaggio dei componenti.
Unica aggiunta di un diodo
1N4007
per evitare inversioni di polarità
della batteria.
Ho previsto l'ingresso polarizzato per l'utilizzo di un qualsiasi
alimentatore stabilizzato.
Per la sua realizzazione si dovrà realizzare il circuito stampato
utilizzando il metodo della fotoincisione o il trasferimento termico.
Si passerà poi alla sua foratura e alla saldatura dei componenti,
facendo attenzione alla polarità del condensatore e del diodo.
Per gli integrati si utilizzeranno dei zoccoli per evitare il loro
danneggiamento.
A montaggio concluso si inseriranno gli integrati sugli zoccoli
(rispettando la tacca di orientamento) e si potrà quindi passare alla
prova del nostro servotester.
Si collegherà alla presa polarizzata l'alimentazione e un servo
all'apposita presa rispettando il senso di inserzione.
A questo punto ruotando con un piccolo cacciavite il
trimmer R2
si dovrà
osservare un'analoga rotazione sul servomotore.
Un'eventuale ronzio del motore è normale.

Schema elettrico
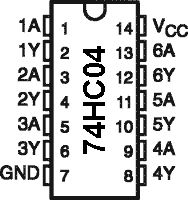
| 74HC04 HEX SCHMITT-TRIGGER INVERTERS | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LM555 Timer | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| 1N4007 - Diodo general purpose 1000V - 1A | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
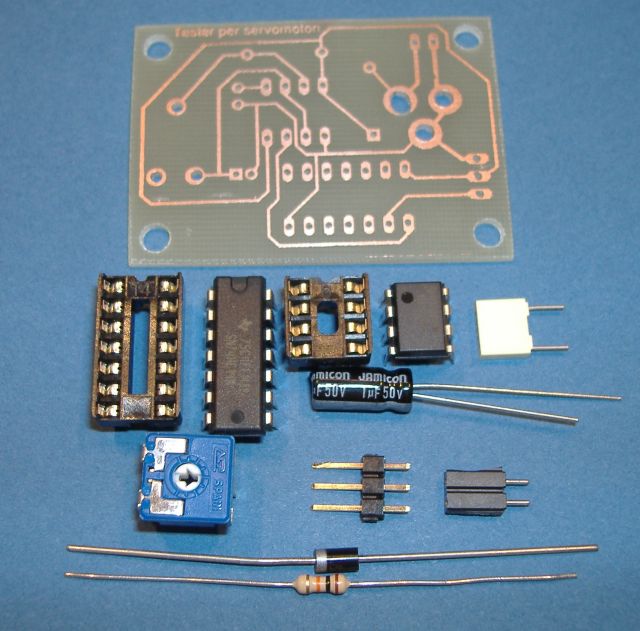
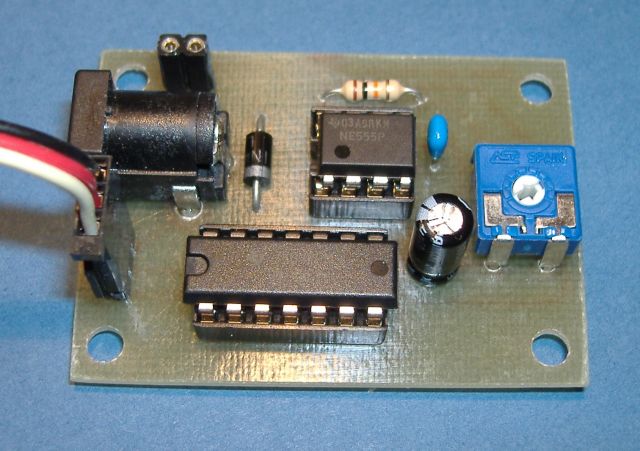
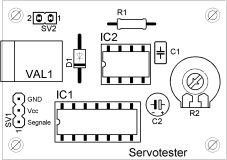
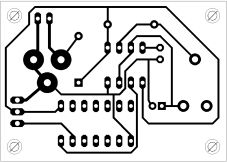
Foto dei componenti e del circuito stampato
 |
 |
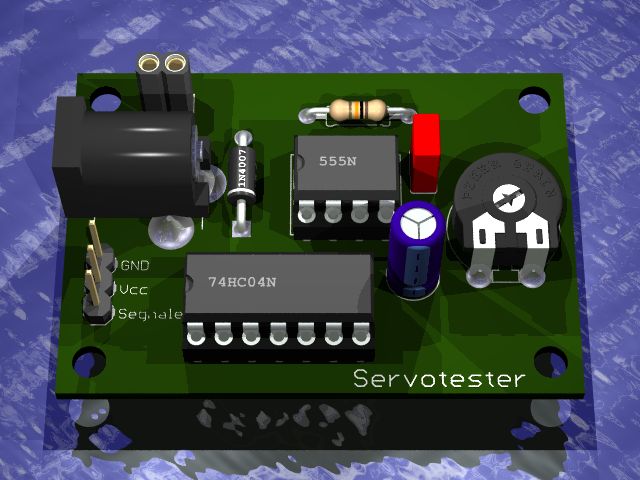 |
| Disposizione componenti | Circuito stampato | Render 3D del PCB |
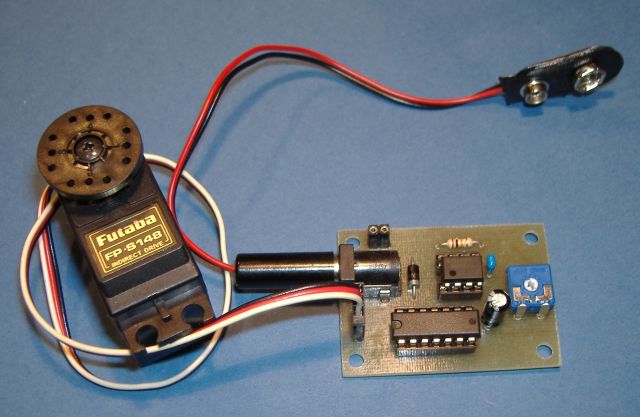
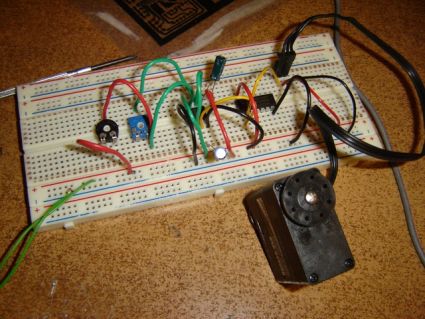
Scheda durante il test
|
| Elenco revisioni | |
| 19/11/2017 | Aggiornato pagina |
| 11/11/2009 | Aggiornato pagina, inserito filmato |
| 16/11/2007 | Inserito foto della scheda e filmato funzionamento |
| 31/10/2007 | Inserito datasheet componenti |
| 26/10/2007 | Emissione preliminare |