![]()

![]()
ultimo aggiornamento
29 aprile 2011
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
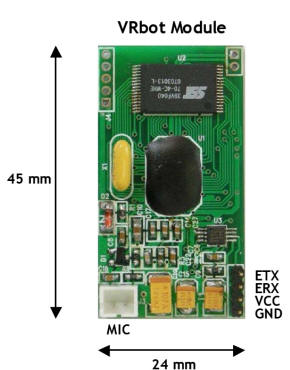
Quella presentato in questa pagina è un
piccolo modulo denominato VRbot ed è stato messo a
punto dalla RoboTech srl, che ha
progettato e sviluppato le funzionalità, l'elettronica ed il software
del
robot
I-Droid 01.
La scheda è una versione ridotta di quella montata sul
robot I-droid 01 (vedere
modulo voice del
robot I-droid 01) in quanto ha in comune lo stesso processore, la
differenza è che questo modulo ha solo la funzione di riconoscimento ma
non quello della riproduzione di parole.
Il modulo può utilizzare sia i wordset "Speaker Independent"
(SI) già inseriti nel modulo oppure fino a 32 comandi "Speaker Dependent"
(SD) addestrabili dall'utente.
La differenza tra comandi SI e SD è che, mentre i primi funzionano
indipendentemente dalla persona che li pronuncia (ammesso che li
pronunci nella lingua corretta!), gli SD funzionano con la persona che
li ha addestrati.

VRbot modulo è progettato per aggiungere facilmente funzionalità versatile
comando vocale per i robot (ad esempio ROBONOVA-I, RoboZak, POP-BOT, ...) o
qualsiasi altro host (PIC ad esempio, schede Arduino,...).
VRbot caratteristiche:

Supporta fino a 32 comandi definiti dall'utente Speaker Dependent (SD) o comandi come trigger così come Voice password. Comandi SD personalizzati in qualsiasi lingua.
Facile da usare e semplice interfaccia utente grafica per programmare i comandi vocali
Lingue attualmente supportato per i comandi di SI: inglese americano, italiano, giapponese e tedesco
Il modulo può essere utilizzato con qualsiasi host con una interfaccia UART (alimentato a 3.3V-5V)
Dimensioni fisiche e assegnazione pin
|
Numero PIN |
Nome PIN |
Tipe (Input/Output) |
Descrizione |
|
1 |
GND |
- |
Ground |
|
2 |
VCC |
I |
Tensione DC input |
|
3 |
ERX |
I |
Serial Port Receive Data (TTL level) |
|
4 |
ETX |
O |
Serial Port Transmit Data (TTL level) |
Requisiti di alimentazione
|
Symbol |
Parameter |
Min |
Typ |
Max |
Unit |
|
ISleep |
Corrente a riposo |
|
< 1 |
|
mA |
|
IOper |
Corrente operativa |
|
12 |
|
mA |
Condizioni operative consigliate
|
Simbolo |
Parametro |
Min |
Typ |
Max |
Unit |
|
VCC |
Tensione DC di alimentazione |
3.3 |
5.0 |
5.5 |
V |
|
Ta |
Range operativo di temperature ambiente |
0 |
25 |
70 |
°C |
|
ERX |
Serial Port Receive Data |
0 |
- |
VCC |
V |
|
ETX |
Serial Port Transmit Data |
0 |
- |
VCC |
V |
Comunicazioni:
Regolabile Comunicazione seriale asincrona:
Baud Rate: 9600 (default), 19200, 38.700, 57600, 115200
8 bit di dati
Nessuna parità
1 bit di stop
Le comunicazioni sono stabiliti utilizzando il protocollo VRbot. Fare riferimento alle appropriate documento disponibile in www.VeeaR.eu.
|
Presentazione del modulo |
Datasheet del modulo V.1.2 (in italiano) |
VRbotGUI versione 1.1.5 (programma "bridge") |
VRbot serial protocol |
Foto del modulo
 |
 |
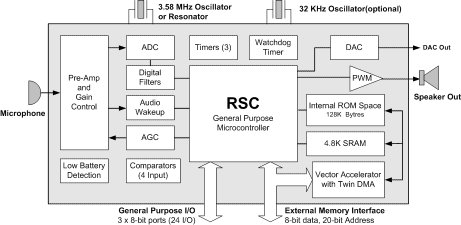
Il circuito delle dimensioni di 45x24mm è basato su un microcontrollore RSC-4128 prodotta dalla Sensory specifico per applicazioni vocali e una memoria Flash esterna di 4 MBit prodotta dalla SST la frequenza di clock è dato da un risuonatore ceramico da 3.58MHz.
Il modulo VRbot è connesso alla
scheda
MR-C3024 tramite 4 cavi, due per l'alimentazione e due per la linea
seriale, vengono utilizzate i due connettori ETX e ERX della scheda.
L'alimentazione della scheda è pari a 5V che viene ridotta a 3.0V
tramite un apposito regolatore presente sul modulo
Sul modulo è inoltre presente un integrato che si occupa di traslare i livelli di tensione di 5V dal
lato TTL del robot a quelli 3.0V del
modulo VRbot
Il modulo permette di interagire
vocalmente con il robot, il riconoscimento di tali comandi, avviene
attraverso l'identificazione di parole predefinite, inserite nella
memoria della scheda elettronica del modulo.
Per rendere comprensibili al robot le parole
pronunciate, è indispensabile parlare in modo naturale, non
eccessivamente veloce e senza enfatizzare il tono, ad una distanza,
ideale, di circa 60 cm.
Naturalmente, la percezione/comprensione delle
parole da parte del robot, è influenzata dall'ambiente circostante:
ambienti in cui ci sono disturbi, eco o riverbero, influenzano
negativamente, il riconoscimento dei comandi vocali.
Per la programmazione della scheda viene utilizzata la stessa
scheda
MR-C3024 su viene caricato
un'apposito programma "bridge".

Con tale programma è possibile registrare e
modificare i comandi vocali.
Nota: il modulo è concepito per funzionare con il robot nella versione
definitiva, se si utilizza in versione intermedio occorre sconnettere i
servomotori per evitare movimenti non voluti nella fase di
programmazione.
![]()
Link al sito dell'azienda che
ha creato I-Droid 01 e il modulo VRbot

Per maggiori informazioni
| Elenco revisioni | |
| 29/04/2011 | Aggiornato pagina |
| 18/09/2009 | Aggiornato VRbot ROBONOVA - Quick Start nella versione in italiano ed in inglese |
| 22/07/2009 | Inserito pdf presentazione in italiano, aggiornato versione programma |
| 20/07/2009 | Inserito segnalazione sito vendita e filmato |
| 05/05/2009 | Inserito segnalazione della pagina nella NEWSLETTER ROBOZAK n° 67 del 22/04/2009 |
| 20/04/2009 | Emissione preliminare |

