

ultimo aggiornamento 9 marzo 2010
|
ultimo aggiornamento 9 marzo 2010 |
|
|
|
Il SONAR
Il SONAR, inventato da Paul Langevin nel 1917 è un termine che nasce come
acronimo dell'espressione inglese SOund NAvigation and Ranging, è una tecnica
che impiega la propagazione del suono per navigare, comunicare o rilevare la
presenza di oggetti. Si distinguono sonar attivi e sonar passivi.
Il SONAR può
essere usato come mezzo di localizzazione acustica.
Quest'ultima è stata
impiegata anche in aria in passato, prima dell'introduzione del radar, ed è
quella che viene utilizzata dal sensore che andremo ad analizzare. Il termine
SONAR indica anche lo strumento usato per generare e ricevere i segnali
acustici.
La banda delle frequenze usate dai sistemi sonar va dagli infrasuoni
agli ultrasuoni.
Esempio di applicazione del sensore EZ1

Il sensore 'LV-MaxSonar-EZ1
Il sensore
LV-MaxSonar-EZ1 prodotto dalla
Maxbotix , è un innovativo sensore ad
ultrasuoni che consente il rilevamento di ostacoli in un range che va da 0 a
6.45 metri.
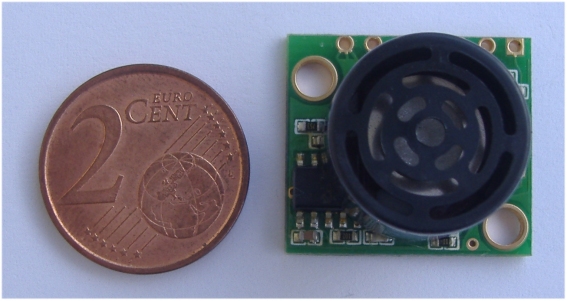
E' compatto (20x22mm) ed è caratterizzato da un
consumo bassissimo.
Il MaxSonar-EZ1 rileva oggetti di distanza e fornisce dati
sulla distanza da 0.152 a 6.45 metri con una risoluzione di 2.54 centimetri. L'interfaccia di comunicazione è multi-formato, può essere utilizzata l'uscita
pulse width (compatibile con l'SRF04) oppure l'uscita analogica che fornisce una tensione variabile in
base alla distanza rilevata, è anche disponibile un'uscita seriale asincrona;
queste modalità di interfaccia rendono il sensore molto versatile ed innovativo.
Un'altra caratteristica del sensore è il suo raggio d'azione che è molto
stretto, rispetto ai sensori analoghi, ed è in grado di individuare oggetti
molto piccoli.
Il sensore il cui schema è visibile nella figura sotto

funziona usando componenti
attivi quali un PIC16F676, quattro amplificatori operazionali contenuti
all’interno di un LM324, un diode array (BAY99DW) , insieme ad una varietà di
componenti passivi.
Il segnale proveniente dal trasduttore è amplificato da un filtro passa banda
/amplificatore, seguito da un altro filtro passa banda / amplificatore
logaritmico , seguito poi da un integratore e in ultimo il segnale è gestito da
un microcontrollore con funzione di convertitore analogico-digitale.
![]()
|
Caratteristiche sensore |
Datasheet |
Presentazione prodotto |
SPECIFICHE:
| • Dimensioni: 2,20 x 2 x 1,64 cm |
| • Peso: 4,3 g |
| • Range di rilevazione: da 15 cm a 6,45 m |
| • Risoluzione: 2,54 cm |
| • Alimentazione: da 2,5 a 5,5 Vdc |
| • Consumo: 2 mA |
| • Il sensore ultrasuoni opera a 42KHz |
| • Tre interfacce d'uscita (attive simultaneamente): Seriale asincrona, analogica e Pulse width. |
|
• Le misure vengono eseguite in modo continuo con l’uscita dei dati |
| • Guadagno variabile continuo per controllo del raggio e soppressione di lobo laterale |
| • Letture ogni 50mS, (20-Hz di rate) |
| • Parametri di comunicazione :9600Baud, 8bit, 1 bit di stop, nessuna parità |
| • Uscita analogica, (Vcc/512) / per Pollice |
| • Impulsi in ampiezza, (147uS/per pollice) |
Descrizione dei PIN
| GND: | Terminale di massa dell’alimentazione. L’alimentazione deve essere ben livellata ed esente da ripple per il miglior funzionamento. |
| +5 V: | Terminale di alimentazione. Il sensore può funzionare con una tensione compresa tra i 2.5V e i 5.5V. con un consumo di corrente che è compreso tra 2-3mA. |
| TX: | Quando il terminale BW è aperto o a livello basso e basso, il terminale TX trasmette un segnale seriale asincrono con il formato RS232 con livelli di tensione compresi tra 0 e Vcc. L’uscita è rappresentata da un carattere ASCII "R", seguito da tre cifre ASCII che rappresentano la distanza espressa in pollici sino ad un massimo di 255, seguite da un ritorno a capo (ASCII 13). Il baud rate è di 9600, 8 bit, nessuna parità con un bit di stop. |
| RX: | Questa terminale è normalmente a livello alto. Il sensore eseguirà una misura continua sino a che il terminale rimarrà a livello alto e arresterà la misura se il terminale sarà portato a livello basso. Portare in alto il livello per un tempo di 20us o più per la lettura della distanza. |
| AN: | il terminale fornisce una tensione analogica con un fattore di misurazione
in scala di (Vcc/512) per pollice. Con una tensione di alimentazione di 5V si
avranno ~ 9.8mV /in. Mentre una tensione di 3.3V darà ~ 6.4mV /in. L’uscita è bufferizzata e corrisponde all’ ultima distanza rilevata |
| PW: | Questo terminale fornisce in uscita un impulso la cui larghezza rappresenta la distanza. Per il calcolo utilizzare come fattore di scala pari a 147us per pollice (25,4mm) |
Descrizione della scansione.
250mS dopo l'accensione il sensore è pronto ad accettare il comando di RX. Se il
pin di RX è aperto o a livello alto, il sensore eseguirà prima un ciclo (49ms)
di calibrazione , e poi eseguirà la lettura della distanza (49ms). Perciò, la
prima lettura durerà ~ 100ms. Le letture seguenti dureranno 49ms. Il sensore
controlla il pin RX alla fine di ogni ciclo. I dati di distanza possono essere
acquisiti una volta ogni 49mS. Ogni periodo di 49ms inizia se il pin RX che è
alto o aperto, dopo di che il sensore invia tredici onde a 42KHz, dopo che il
pin Pulse Width (PW) è posto a livello alto. Quando un ostacolo è identificato,
il pin PW è portato a livello basso. Il pin PW è posto a livello alto per 37.5ms
se nessun ostacolo è identificato.
Il tempo rimanente dei 49ms (meno di 4.7ms) è utilizzato per taratura della
tensione analogica al livello corretto. Quando una lunga distanza è misurata
immediatamente dopo una distanza corta, la tensione analogica non può arrivare
al giusto livello all'interno di un solo ciclo di lettura. I dati seriali sono
inviati durante l'ultimo dei 4.7ms.
Il precisione del sensore è calibrata in fabbrica a 1% a 5V, e durante
l’utilizzo è migliore che 2%.
Utilizzando il sensore a 3.3V la distanza di scansione diminuisce ulteriormente
di 1-2 %
Istruzioni per l’alimentazione.
Ogni volta che il sensore è alimentato questo si calibrerà durante il primo
ciclo di misura. Il sensore utilizzerà questa informazione memorizzata per la
ricerca degli ostacoli. È importante che nessun ostacolo sia vicino al sensore
durante questo ciclo di calibrazione. La migliore sensibilità si ottiene quando
non esistono ostacoli a meno di 35cm, ma è sufficiente che vi siano almeno 17cm.
Se un oggetto è molto vicino al sensore durante il ciclo di calibratura, il
sensore può ignorare poi gli ostacoli trovati a quella distanza.
Il sensore non compensa la temperatura durante la calibrazione della misura
della distanza ma invece compensa per la presenza della griglia sul sensore.
Se avviene una variazione di temperatura, umidità, o un cambiamento della
tensione di alimentazione durante le operazioni di misura potrebbe essere
necessario una ricalibrazione. Senza ricalibrare, se la temperatura aumenta, può
eseguire false letture su corte distanze. Se la temperatura decresce, il sensore
ridurrà la sua sensibilità.
Per ricalibrare il sensore, occorre eseguire un ciclo di accensione e poi
eseguire una lettura.

| Elenco revisioni | |
| 09/03/2010 | Aggiornato pagina |
| 11/11/2009 | Inserito programma di lettura uscita analogica |
| 07/09/2009 | Emissione preliminare |

