![]()
ultimo aggiornamento
27 gennaio 2012
|
|
|
|
|
|
|
Rivista
n° 297 in edicola nel
mese di Marzo 2010 nella sezione Progettare e costruire, titolo
dell'articolo
Controller
per servo e sensore PIR
, inerente il
Serial Servo Controller della Pololu
e un sensore di
tipo PIR. Vengono illustrati il loro funzionamento in rapporto alla scheda con processore Basic Stamp 2 SX e Cubloc CB220.
|

Perché utilizzare un Serial Servo
Controller
Alcune volte il numero di servomotori da comandare è elevato come nel caso di
robot esapodi.
Per ovviare a questo sono disponibili i Servo
controller, come quello prodotto dalla Pololu, che utilizzando una sola porta
(configurata come seriale) ne possono comandare sino a otto; ad ogni Controller
può essere assegnato un numero identificativo da 0 a 16 quindi, si potranno
comandare sino a 128 servomotori.
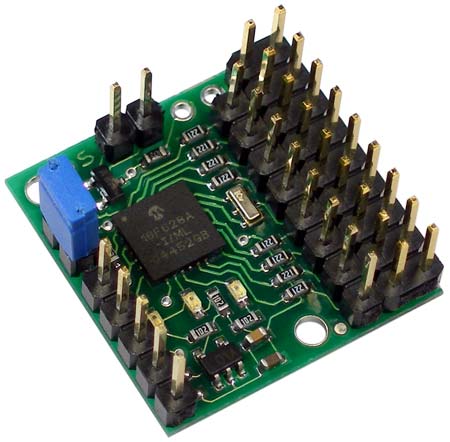
Micro Serial Servo Controller
La scheda Servo Serial Controller si presenta come uno stampato di
piccole dimensioni di poco più di due centimetri di lato.
Su di essa trovano posto oltre al processore a 8 bit con memoria flash tipo
PIC16F628A della Microchip, il risuonatore per il clock, un regolatore di
tensione
LP2980, tre led di stato e vari connettori con funzione di alimentazione di
interfaccia e per il collegamento dei servomotori.
L'interfaccia seriale a livello RS232 è ottenuta con un transistor tipo
LMUN2215LT1
La scheda può controllare
fino a 8 servocomandi tramite un PC (RS232) o un processore connesso alla porta
seriale (livello TTL)
Nonostante le sue minuscole dimensioni è ricca di funzioni. Può controllare la
velocità e la posizione di ognuno degli 8 servi indipendentemente, la velocità
della porta seriale è rilevata automaticamente nel range da 1200 a 38400 Baud e,
come detto sopra, diversi moduli possono essere utilizzati sulla stessa linea
seriale per controllare fino a 128 servi.
I 3 LED di stato e un convertitore di
livello seriale (RS232 -> TTL) costituiscono una soluzione rapida ed efficace al
problema di controllo dei servomotori.
Questo servo controller supporta due
protocolli di comunicazione differenti.
La scheda è compatibile con lo standard del Mini SSC II , è quindi possibile
utilizzare tutti i programmi e le utility sviluppate per questo standard.
I collegamenti del Servo Controller sono visibili nella foto sotto
la maggior parte dei pin sono identificati sul retro della scheda del Servo Controller.
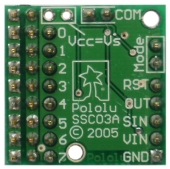
Tutte le piazzole connesse a massa hanno forma quadra.
| Specifiche Tecniche : | |
| Tensione Alimentazione | 5-16V |
| Consumo | 5 mA (valore medio) |
| Risoluzione | 0.5 µs (~0.05 °) |
| Range larghezza impulso | 0.25 - 2.75 ms |
| Numero di porte Servo | 8 |
| Tensione I/O | 0 e 5 V |
| Velocità seriale | 1200 - 38400 (autodetect) |
| Dimensioni | 23.1 x 23.1 mm |
Alimentazione
I servo sono alimentati in genere con una tensione compresa tra i 4.8 e i 6.0
volt.
Questa alimentazione può essere fornita tramite il connettore posto in
alto a destra.
L’alimentatore deve essere in grado di garantire la corrente richiesta dai
servo, che nel caso siano tutti collegati e vengano mossi simultaneamente, può
essere molto elevata (vicina a 10 A). Il processore necessita di una sua
alimentazione separata che può essere compresa tra i 5 e i 16 volt. Questa è
fornita tramite il connettore in basso a sinistra (PIN segnati con VIN e GND).

Segnale di controllo
Il Servo controller può essere controllato tramite una logica seriale TTL (0-5
V) fornita al PIN “logic-level serial input” oppure RS-232 utilizzando
l’apposito connettore.
Non è possibile utilizzare entrambi gli ingressi. Esistono poi i pin “reset” e
“logic-level serial input” che nella maggioranza delle applicazioni possono
essere lasciati sconnessi.

Servomotori
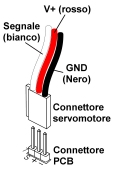
Quando si collegano i servomotori occorrerà prestare attenzione
poiché un errato collegamento può danneggiarli.
Assicurarsi che il filo del
segnale (di solito bianco o giallo) deve essere posto verso l'interno della
scheda mentre il cavo nero verso l’orlo esterno.
Link utili
| http://www.pololu.com/ | Sito del produttore del Serial Servo Controller. |
| http://www.pololu.com/catalog/product/207 | Link del Micro Serial Servo Controller |
| http://www.pololu.com/file/0J41/stamp.pdf | Utilizzo del Controller con Basic Stamp |
| Elenco revisioni | |
| 27/01/2012 | Inserito riferimento articolo rivista Fare Elettronica n° 297 |
| 09/03/2010 | Emissione preliminare |