ultimo aggiornamento 23 febbraio 2011
|
ultimo aggiornamento 23 febbraio 2011 |
|
|
|
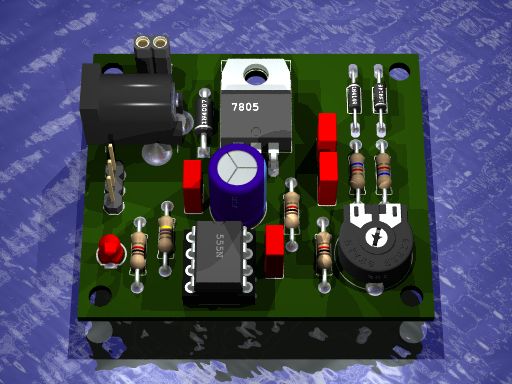
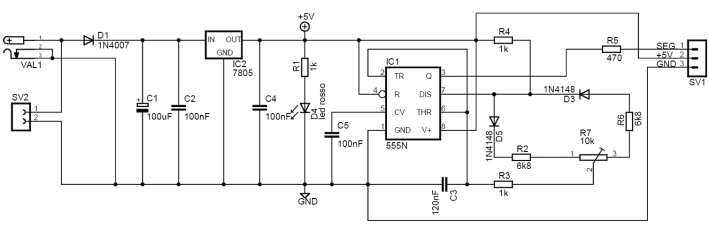
Per testare i servomotori
è necessario un circuito che sia in grado di generare un segnale di
controllo di tipo PWM (Pulse Wide Modulation) formato da impulsi ad onda
quadra, ripetuti ogni 20 ms, la cui larghezza permette di stabilire la
posizione del perno.
Con impulsi della durata di 1,5 ms il perno si porta in posizione
centrale.
Il circuito proposto è basato sull'integrato NE555 in cui il trimmer è utilizzato per variare il valore del duty-cycle del PWM.
Sulla scheda è presente un integrato regolatore
LM7805 che permette di alimentare il tutto con un alimentatore anche
non stabilizzato con una tensione di uscita compresa tra i 9 e i 12 V.

Per
maggiori informazioni
|
|
||||||||||||||||||||||||||||||||||||||||||||||
| LM555 Timer | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LM 7805 Regolatore di tensione | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Elenco revisioni | |
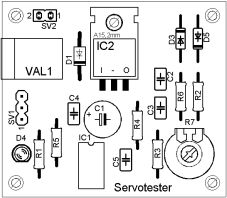
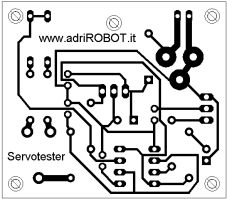
| 25/10/2007 | Inserito schema elettrico, elenco componenti, e disegno circuito stampato |
| 28/9/2007 | Emissione preliminare |