![]()

ultimo aggiornamento 29 dicembre 2016
|
ultimo aggiornamento 29 dicembre 2016 |
|
|
|
Theremino è un sistema Open Source, per collegare i
computer con il mondo reale. Le applicazioni vanno dalla musica, alla didattica,
alla ricerca scientifica.
A differenza dei sistemi similari (ad esempio Arduino), il sistema funziona
appena acceso, e non richiede programmazione del firmware.
Il sistema Theremino non è una scheda con micro controllore programmabile (come
Arduino), ma un dispositivo di Input Output, come un Mouse.
Il sistema Theremino è applicabile anche a sistemi “embedded”, che richiedono
reazioni rapidissime (ad esempio i droni). I FlatPC per applicazioni “embedded”
sono più piccoli, più economici e più leggeri sia di Arduino che di Raspberry,
come spiegato in questa pagina.
La architettura di comunicazione è innovativa. Diversa da ogni altro sistema
simile. I principi di base sono spiegati nella pagina the-theremino-mission
Lo stesso utente, anche senza conoscere la programmazione, può configurare i
moduli, per misurare, grandezze fisiche di ogni tipo: temperature, radiazioni,
campi magnetici, terremoti, inquinanti… e per pilotare servocomandi, motori, led
e lampade, forni, elettro-valvole, relè, robot, macchine a controllo numerico,
stampanti 3D, macchine per il taglio laser e per le incisioni, etc…
Per maggiori informazioni vedere il sito
http://www.theremino.com/
La sistema qui presentato è stato da me vinto come premio per essere arrivato al 3° posto delle manifestazione indetta dal Blog Elettronica Open Source denominata view4U 2.0 che si è conclusa il 4 gennaio 2014.



Dispositivi del sistema
Il sistema Theremino è formato dai seguenti moduli: Modulo Master, modulo slave “CapSensor HQ", modulo slave “Servo”
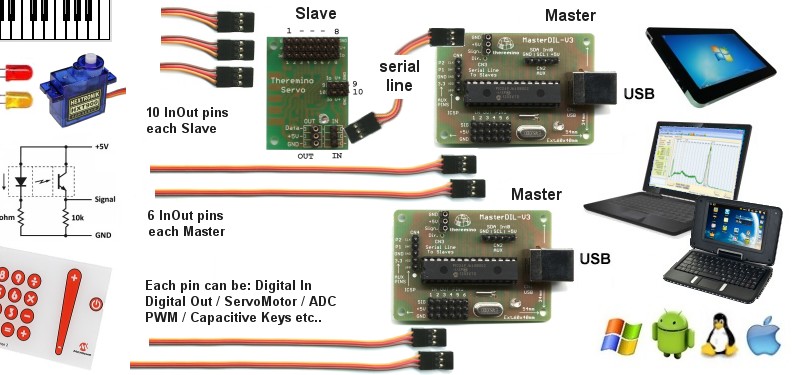
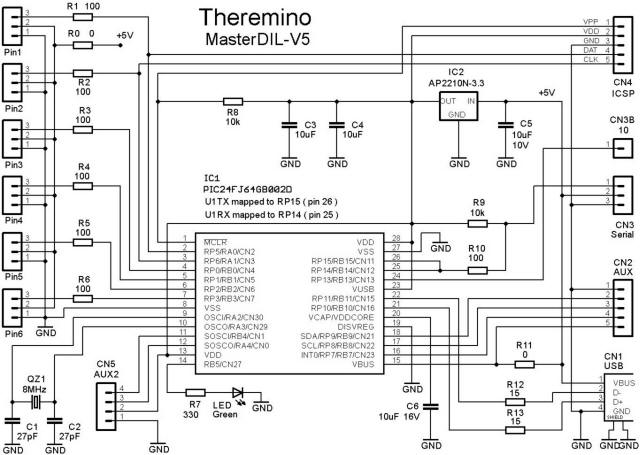
Caratteristiche del modulo Master
Il modulo “Master” si collega a una porta USB, fornisce alcuni Pin Generici di In/Out e una linea di trasmissione seriale, verso i moduli Slave.

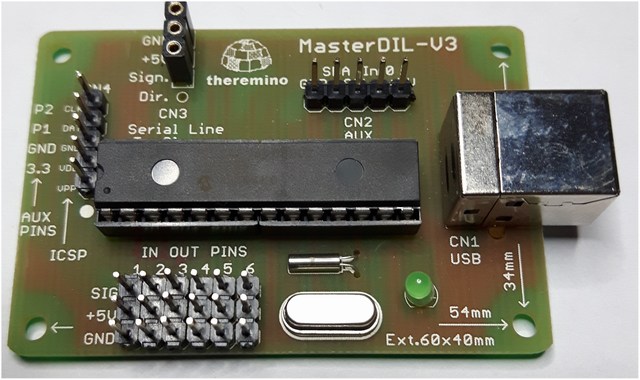
Il connettore “USB” può essere collegato a una o due prese
USB, per prelevare una corrente di 500mA o di 1A. Il connettore “Serial Line to
slaves” normalmente viene collegato alla linea seriale che va ai moduli slaves
con 3 fili (GND/+5V/Dati).
E’ anche possibile connettere più di un Master, con prese USB e linee di
trasmissione separate, in modo da aumentare le possibilità di connessione. Si
può, ad esempio, usare una linea di comunicazione ad alta velocità, per i
dispositivi che richiedono un rinfresco rapido ed una seconda linea di
comunicazione, più lenta, per tutti gli altri.
Ognuno dei Pin può essere configurato indipendentemente come:
– Non usato
– Uscita digitale
– Uscita PWM
– Uscita per servo-comandi
– Uscita FAST-PWM con alta risoluzione per i DAC
– Uscita STEPPER per controllare i motori passo passo
– Ingresso di controllo della distanza raggiunta dagli STEPPER
– Ingresso digitale
– Ingresso ADC per potenziometri e trasduttori
– Ingresso per tasti capacitivi
– Ingresso per trasduttori resistivi
– Ingresso di conteggio, frequenza e periodo
– Ingresso per gli Encoder a due fili in quadratura.
– Ingresso per trasduttori speciali.
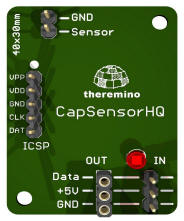
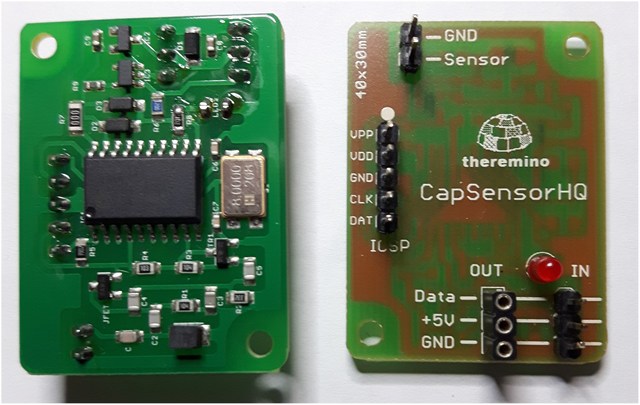
Caratteristiche del modulo slave “CapSensor HQ"
Questo slave misura la distanza di un oggetto conduttivo (tipicamente una mano). Nel range di distanze da qualche centimetro a qualche metro fornisce prestazioni irraggiungibili con ogni altro sistema di rilevamento.
A differenza dei sensori a ultrasuoni il rilevamento è
sempre progressivo, non può in alcun modo “saltare” da una distanza all’altra,
per effetto delle riflessioni del segnale o della rilevazione di ostacoli
multipli. La rilevazione è sempre stabile e precisa con un tempo di risposta
rapidissimo, nell’ordine dei millisecondi.
Il CapSensorHQ è perfetto per controllare con la mano in modo lineare e sempre
morbido le caratteristiche di suoni e video, quali Waveform (wav, mp3, ecc.) e
Filmati/Videoclip (avi, mpg, mp4, ecc.)
Caratteristiche:
Range di capacity misurabili: da 0.001 pF a 10 pF
Risoluzione: un millesimo di pF
Stabilità: intorno al millesimo di pF
Rilevazione di oggetti piccoli (una mano): fino ad alcuni metri
Rilevazione di oggetti grandi (un’automobile): fino a decine di metri
Precisione e stabilità sulla distanza rilevata: da qualche mm a qualche decina
di cm
Dimensioni del sensore variabili da un centimetro quadro a un metro quadro.
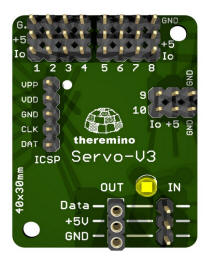
Caratteristiche del modulo slave “Servo”
Questo “Slave” fornisce dieci connettori standard, usabili come “Pin” di ingresso-uscita generici e molto comodi per connessioni veloci con i cavetti standard Marrone/Rosso/Giallo
Configurazioni valide
fino a 10 uscite digitali
fino a 10 uscite PWM per la conversione digitale analogica
fino a 10 uscite SERVO per servocomandi
fino a 10 ingressi DIGIN per segnali digitali
fino a 8 ingressi ADC per segnali analogici (pins: 1, 2, 3, 4, 5, 6, 7, 8)
fino a 8 ingressi CAP per tasti capacitivi (pins: 1, 2, 3, 4, 5, 6, 7, 8)
fino a 8 ingressi RES per trasduttori resistivi (pins: 1, 2, 3, 4, 5, 6, 7, 8)
fino a 10 ingressi COUNTER per misure di conteggio e frequenza
un pin FAST_COUNTER per il conteggio veloce e frequenza (pin: 8)
un pin PERIOD per la misura del periodo di un segnale e frequenza (pin: 9)
un pin USOUND_SENSOR per sensori a ultrasuoni SRF05 o altri sensori simili (pin:
9)
I Pin di tipo PWM, SERVO, ADC, CAP e RES possono essere configurati a 8 o 16 bit
I Pin di tipo DIG_IN, COUNTER, FAST_COUNTER e PERIOD possono essere configurati
con o senza PullUp
Tensioni e correnti
I Pin di Input-Output lavorano con segnali analogici da 0V a 3.3V. Sui
connettori è disponibile la tensione di 5V (marcata V+)
Applicazioni
Sul sito, sono presenti molte applicazioni, ecco alcuni esempi:
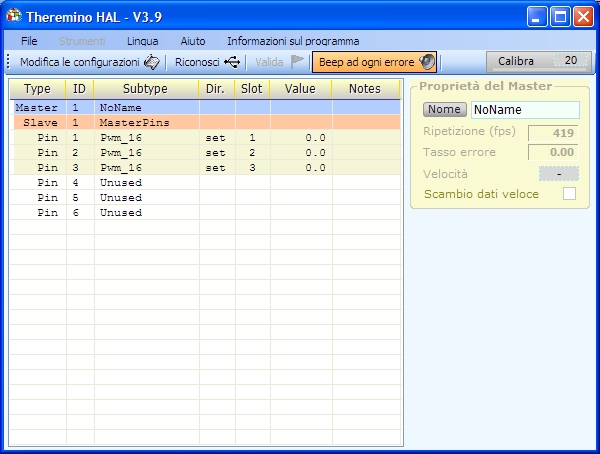
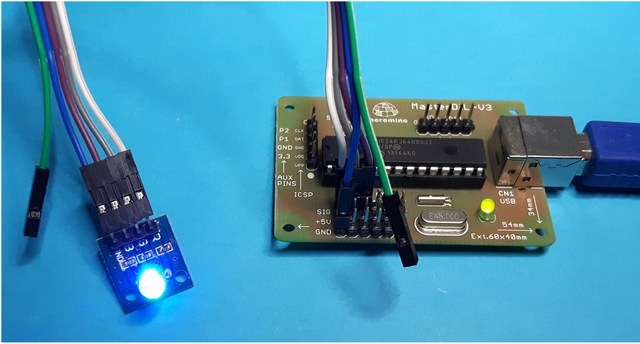
Theremino HAL: L'applicazione Theremino HAL semplifica la comunicazione con i dispositivi collegati alla USB. Per LED accesi e spenti, si impostano i loro PIN come DigOut, per regolarli in luminosità, si impostano come Pwm_16.
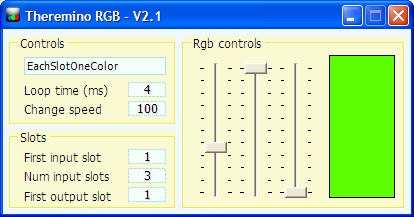
Led RGB: Tre led di colore Rosso, Verde e Blu, possono generare luce di qualunque colore. L'applicazione Theremino RGB li controlla con rampe di dissolvenza temporizzate, oppure guidate da altre applicazioni del sistema.
| |
| Elenco revisioni | |
|
29/12/2016 |
Emissione preliminare |

