![]()
![]()
Ultimo aggiornamento 21 giugno 2012
a cura di Nicola Sellitto (Napoli) e Adriano Gandolfo (Torino)
|
|
Ultimo aggiornamento 21 giugno 2012 a cura di Nicola Sellitto (Napoli) e Adriano Gandolfo (Torino) |
|
|
|
In questa pagina potete trovare le informazioni necessarie per la realizzazione della scheda di potenza del robot TOBOR realizzata utilizzando un doppio ponte H presente all'interno dell'integrato L293 analogo al SN754410, alla scheda possono inoltre essere collegati degli encoder per il controllo della rotazione.
 |
 |


| Elenco componenti | |
| R 1,2 | 270 ohm ¼ W |
| R 3,5 | 330 ohm ¼ W |
| R 4,6 | 10 Kohm ¼ W |
| C1 | 100 n |
| D 1,2,3,4,5,6,7,8 | diodo schottky tipo 1N5817,1N5818, 1N5819, BYV10-40 |
| D 9,10 | diodi led |
| IC1 | L293B * |
| IC2 | 74HC14N |
| JP1 | Connettore maschio 14X2 90° |
| JP2-3 | Connettore maschio 4X1 |
| JP4-5 | Connettore maschio 2X1 |
| JP6-7-8-9 | Connettore maschio 3X1 completo di ponticello |
*nota: nel caso
venga utilizzato un integrato L293D
oppure SN754410
compatibile
per piedinatura non dovranno essere inseriti i diodi schottky
in quanto integrati nel chip
|
|
 Schema per L293B |
|
|
Schema per L293D |

|
Caratteristiche dei diodi schottky adatti al progetto |
|||
| Caratteristiche | 1N5818 | 1N5819 | BYV10-40 |
| Max corrente nominale IF (min, Ta=25°C) | 1A | 1A | 1A |
| Max corrente di picco IFSM (min t=8,3 ms) | 25A | 25A | 25A (t=10 ms) |
| Max tensione inversa di picco VRRM (min) | 30V | 40V | 40V |
| Tensione diretta VF (max) | 0,55V (IF=1A) | 0,6V (IF=1A) | 0,55V (IF=1A) |
| Corrente inversa IR (max, Ta=25 °C) | 1 mA | 1 mA | 0,5 mA |
| Capacità della giunzione CJ (max, VR=4V) | 110 pF | 110 pF | 220 pF (VR=0V) |
| Contenitore | DO-41 | DO-41 | DO-41 |
| 1N5817- 1N5818 - 1N5819 - Diodo schottky | ||
 |
 |
 |
| Piedinatura | Datasheet | Foto |
| BYV 10-40 Small signal schottky diodes | ||
|
|
|
 |
| Piedinatura | Datasheet | Foto |
| L293B - Driver per ponte H | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| L293D - Driver per ponte H | ||
|
|
|
|
| Piedinatura | Datasheet | Foto dell'integrato |
| SN754410 - Driver per ponte H | ||
|
|
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
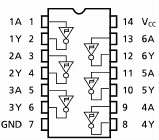
| SN74HC14 hex schmitt-trigger inverters | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Realizzazione pratica.
Per la costruzione della scheda si procederà
iniziando dalla realizzazione del circuito stampato il cui lato rame in scala
1:1 è riportato sotto.
Per la sua realizzazione si utilizzerà una basetta in
vetronite (monofaccia) di dimensioni 65x70 mm, il metodo potrà essere quello
della fotoincisione o del trasferimento termico utilizzando i cosiddetti fogli
blu (PRESS-N-PELL), in questo caso ricordo che l’immagine delle tracce del
circuito dovrà essere speculare.

Circuito stampato.
Una volta inciso il rame, si verificherà in controluce o mediante l’utilizzo di
un multimetro che non vi siano cortocircuiti soprattutto tra le piste più
vicine.
Si passerà quindi alla foratura della stessa, utilizzando principalmente una
punta da 0,8 mm, mentre si utilizzeranno una da 1mm per i diodi, e i pin-strip.
In seguito si potrà passare al posizionamento e alla saldatura dei componenti
seguendo lo schema visibile sotto.

Disposizione dei componenti.
Per la saldatura si utilizzerà un piccolo
saldatore a punta fine, della potenza di circa 25 – 30 W.
S’inizierà dai vari ponticelli, quindi le resistenze e i diodi facendo
attenzione al loro posizionamento in quanto sono polarizzati, si potrà quindi, procedere con
gli zoccoli degli integrati e i pin-strip.
Terminato la saldatura si potranno inserire gli integrati negli
appositi zoccoli facendo attenzione alla tacca di riferimento.
|
Descrizione connettore di collegamento |
|||||
|
|
|
PIN | SEGNALE | FUNZIONE | |
| 4 | RC1 | output | PWM Motore DX | ||
| 6 | RC2 | output | PWM Motore SX | ||
| 16 | GND | contatto di massa | |||
| 17 | RB2 | output | Enable Motore DX | ||
| 18 | GND | contatto di massa | |||
| 19 | RB3 | output | Enable Motore SX | ||
| 20 | GND | contatto di massa | |||
| 21 | RB4 | input | Encoder Motore DX | ||
| 22 | +5V | alimentazione logica | |||
| 23 | RB5 | input | Encoder Motore SX | ||
| 24 | +5V | alimentazione logica | |||
| 26 | +6V | alimentazione motori | |||
| 28 | +6V | alimentazione motori | |||
| Settaggio ponticelli | |
| Modalità Sign Magnitude non classica | |
| JP6 2-3 | 3,4 EN =+5V |
| JP7 2-3 | 3A= RB3 pin direzione |
| JP8 2-3 | 1,2 EN = +5V |
| JP9 2-3 | 1A = RB2 pin direzione |
| Modalità Locked Anti Phase | |
| JP7 1-2 | 3A = NOT 4A |
| JP9 1-2 | 1A = NOT 2A |
| Caso A) con Enable impostabile | |
| JP6 1-2 | 3,4 EN = RB3 |
| JP8 1-2 | 3,4 EN = RB2 |
| Caso B) con Enable predefinito | |
| JP6 1-2 | 3,4 EN = +5V |
| JP8 1-2 | 3,4 EN = +5V |
| In tutti i casi si ha: | |
| 2A= RC1 PWM | |
| 4A= RC2 PWM | |
| Elenco revisioni | |
| 21/06/2012 | Aggiornato pagina |
| 02/07/2004 | Emissione preliminare |



