
ultimo aggiornamento 14 gennaio 2012
|
ultimo aggiornamento 14 gennaio 2012 |
|
|
|
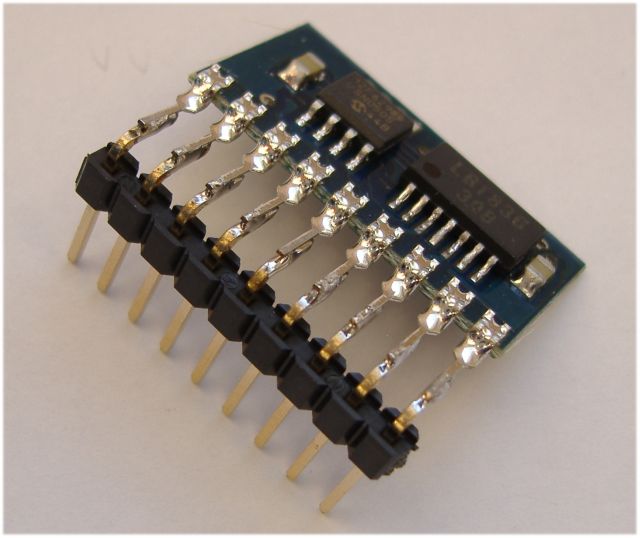
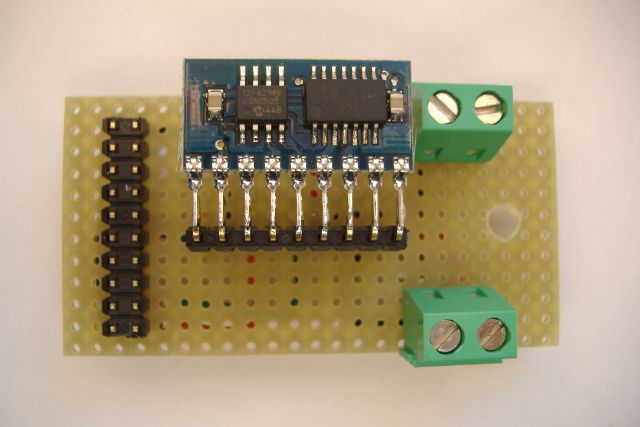
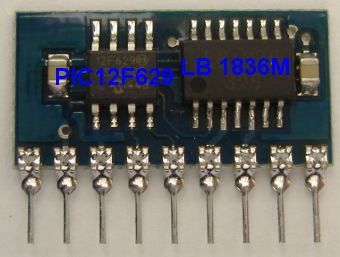
Nelle foto è visibile la scheda che è
andata a sostituire al scheda di pilotaggio dei motori.
Su di essa è presente una piccola schedina prodotta dalla
Pololu Robotics and
Electronics
(in
vendita in Italia sul
sito RobotItaly), si tratta di Micro Dual Serial
Motor Control, in cui è presente un doppio ponte H formato
dall'integrato
LB 1836M
(prodotto dalla SANYO) e un
PIC12F629 per la
gestione del ponte e per la comunicazione con la scheda di controllo.
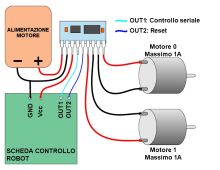
Questo controller consente di pilotare due motori CC fino ad 1A di
assorbimento con 127 passi di velocità in due direzioni tramite semplici
comandi.
Con essa è possibile regolare la velocità dei singoli motori in modo da
correggere le normali tolleranze di costruzione per ottenere la stessa
velocità di rotazione e quindi l'andamento diritto del robot.

Dettaglio montaggio scheda

|
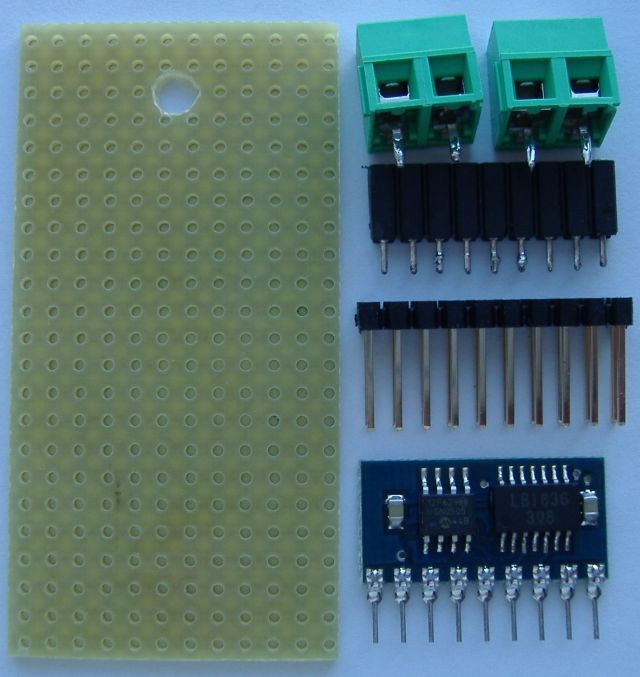
Elenco componenti |
|
|
IC1 |
Modulo motore Pololu |
|
X1 |
Connettore striscia 2x10 |
|
X3 |
Morsettiera da CS 2 poli |
|
X4 |
Morsettiera da CS 2 poli |
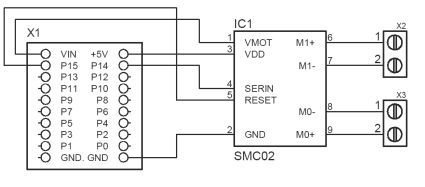
Lo schema elettrico è molto semplice ed è
rappresentato dal connettore X1 verso la scheda di controllo
l'integrato IC1 e dalle due morsettiere per il collegamento ai motori X2
e X3.
Per il controllo si è utilizzato la porta P14 per la comunicazione
seriale e P15 per il reset
 |
 |
 |
A
lato sono visibili per confronto le due schede di controllo.
|
Nelle foto successive è visibile la scheda definitiva realizzata dopo aver testato il prototipo
 Nuova scheda motore |
 Nuova scheda motore montata |
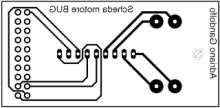
 Scheda comando motori lato rame |
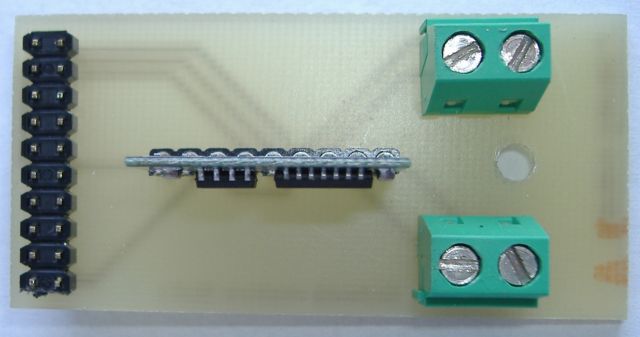 Scheda comando motori lato componenti |
 Dettaglio collegamento motori |
|
 |
 |
| Circuito stampato |
|
 Foto circuito stampato |
|
Micro Dual Serial Motor Control
|
|
| Caratteristiche Tecniche del Micro Dual Serial Motor Control: | |
| Velocità Seriale | 1.200 - 19.200 baud (autodetect) |
| Tensione Motori | 1.8 - 9V |
| Corrente Motori | 1A X 2 (continua) - 2A collegando 1 solo motore |
| Tensione Logica | 2.6 - 5.5V |
| Frequenza PWM | 2 motori 600Hz - 1 motore 750Hz |
| Passi Velocità | 127 avanti /127 indietro / off |
| Motori | 1 o 2 |
| Dimensioni | 22.8 x 11.4mm |
 |
 |
|
Schema di collegamento con 2 motori (1A x 2) |
Schema di collegamento con motore singolo (2A) |
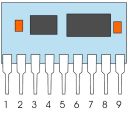
Componenti che formano il Micro Dual Serial Motor Control

Schema dell'integrato LB 1836M (prodotto
dalla SANYO)
![]()
Data scheet
| Processore PIC12F629/675 - 8-Pin FLASH-Based 8-Bit | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del processore |
| Elenco revisioni | |
| 14/01/2012 | Aggiornato pagina |
| 04/06/2007 | Inserito foto scheda definitiva |
| 12/01/2007 | Emissione preliminare |