Modifiche e idee
MIGLIORARE L'AUTONOMIA DEL ROBOT
autore: Enrica |
 Prima
ancora di parlare di modifiche, se l'autonomia di I-D01 vi sembra
insufficiente provate ad usare batterie Ni-MH di buona marca (ad
esempio Sanyo, Panasonic, Duracell) da 2600mA (meglio da 2750mA, se le
trovate), ed evitate le pile del supermercato vendute a prezzi
stracciati che non vanno bene per applicazioni robotiche. E' meglio
spendere un pochino di più all'inizio (un buon pacco da 4 batterie
dovrebbe costare non meno di 10-12 euro) piuttosto che una barca di
soldi in pilette usa e getta. Se, nonostante questi consigli,
l'autonomia del robot non vi soddisfa, vi propongo una soluzione
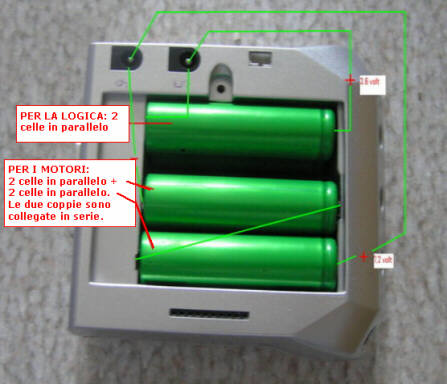
studiata da Enrica: consiste nel ricorrere alle batterie Li-Ion da
2.400mA a 3,7V. Per la logica si crea un pacco di 2 celle messe in
parallelo in modo da ottenere 3,7V a 4.800mA; per i motori si crea
un'altro pacco con 4 celle messe a 2 a 2 in parallelo e poi in serie in
modo da ottenere 7,4V a 4.800mA. In totale si usano quindi 6 celle
Li-Ion che hanno dimensioni leggermente differenti dalle classiche AA;
togliendo il portabatterie, rimane spazio a sufficienza per ospitarle
tutte e 6; ovviamente bisogna creare delle spinette per i nuovi
collegamenti. Il modello di batterie consigliato è Li-Ion sony
US18650GR. Questa è la soluzione migliore che offre molte ore di
autonomia al robot; il lato negativo (a parte il costo molto più
elevato rispetto alla celle Ni-MH) è che le batterie Li-Ion presentano
un certo livello di pericolosità se maneggiate male. A tal proposito vi
riporto di seguito i preziosi consigli di IceMan. ALIMENTATORE DUALE
autore: Chiccow |
 Questo
circuito permette di alimentare I-D01 utilizzando un alimentatore da
banco (stabilizzato o non). Lo scopo del circuito è suddividere la
tensione offerta da un unico alimentatore in due tensioni
stabilizzate e di valore adatto per i motori e la logica. Questo
circuito permette di alimentare I-D01 utilizzando un alimentatore da
banco (stabilizzato o non). Lo scopo del circuito è suddividere la
tensione offerta da un unico alimentatore in due tensioni
stabilizzate e di valore adatto per i motori e la logica.
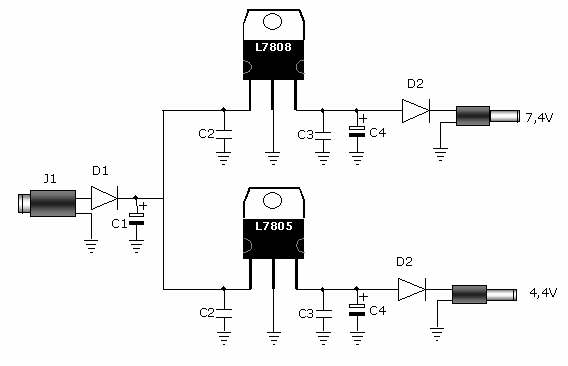
Componenti
J1 - spinotto femmina che si attacca all'alimentatore da banco; la
tensione puntata sull'alimentatore deve essere almeno 10V. J2 -
spinotto maschio che fornisce 7.4V di tensione e si collega alla
boccola in alto del marsupio (motori) J2 - spinotto maschio che
fornisce 4.4V di tensione e si collega alla boccola in basso del
marsupio (logica) D1 - diodo 1N5400 D2 - diodo della serie 1N400x, ad
esempio 1N4007 (se ne usano 2) C1 - condensatore elettrolitico
da 1000uF C2 - condensatore da 330nF (se ne usano 2) C3 -
condensatore da 100nF (se ne usano 2) C4 - condensatore elettrolitico
da 100uF (se ne usano 2) LM7808 - stabilizzatore da 8V LM7805 -
stabilizzatore da 5V Note - I collegamenti con gli spinotti vanno fatti tenendo conto che il positivo va all'interno e il negativo all'esterno.
Le boccole del marsupio sono predisposte proprio per questo tipo di
collegamento; tuttavia sono stati segnalati dei casi di cablaggio
invertito; quindi prima di utilizzare le boccole bisogna
accertarsi che non ci siano collegamenti errati dentro il marsupio
(giusto per evitare i fuochi d'artificio).
- Tipologia
di spinotti: J1 deve essere scelto in modo che si colleghi allo
spinotto dell'alimentatore da banco; J2 e J3 non sono uguali, dipendono
dalle boccole del marsupio. Nel mio kit, J2 è contrassegnato con la
lettera D, mentre J3 con la lettera G.
- Sull'integrato LM7805 va messa un'aletta di raffreddamento, mentre sull'LM7808 è consigliata ma non necessaria.
- La
tensione in ingresso (J1) deve essere tra i 10V e i 12V; per valori più
bassi non si ottengono le giuste tensioni in uscita; per valori più
alti, gli integrati si scaldano maggiormente e consumano corrente
inutilmente.
- I condensatori C2 e C3 vanno messi molto vicini agli integrati.
- Il diodo D1 serve per impedire inversioni di polarità
- I
due diodi D2 servono per ridurre di 0.6V le tensioni stabilizzate
dai due integrati, in modo da ottenere 7.4V per i motori e 4.4V per la
logica.
ALIMENTATORE DUALE
autore: Ciuchino |
 Il
circuito descritto sopra richiede un alimentatore per funzionare;
invece il seguente progetto è un alimentatore duale completo realizzato
sfruttando quello del PC. L'alimentazione di un PC (da tavolo)
fornisce alle unità a disco una tensione continua stabilizzata di 12V
(filo giallo) e una da 5V (filo rosso) che possono essere ridotte
facilmente per ottenere 7,4V e 4,4V. I fili giallo, nero, rosso sono quelli di una spina per l'alimentazione di un'unità a disco. Per realizzare un regolatore di volume
è sufficiente utilizzare un trimmer da 1K ohm da collegare in
serie con uno dei due fili gialli che collegano il modulo voice con lo
speaker. Così è
possibile diminuire/aumentare il volume della voce del robot
agendo sul trimmer: è più comodo scegliete un modello che permetta
l'aggancio del perno, in modo che il trimmer funga da potenziometro. ANALISI E RIUTILIZZO DELLA BRAIN&VISION
autore: Alessandro Accattini |
Segnalo il link ad un sito molto
interessante che descrive come sviluppare e riutilizzare la scheda
Brain&Vision per applicazioni indipendenti dal robot I-D01: http://escogito.altervista.org/arm-ita.html COME NASCONDERE I FILI DEL COLLO
autori: Neo1 - Enrica |
I
cavi che escono fuori dalla testa sono fastidiosi e antiestetici: è
possibile farli passare tutti attraverso il collo in modo che rimangano
nascosti, e non producano alcun tipo di intralcio durante il movimento.
E' interessante notare che la scatola motore della testa e i componenti
del collo sono già predisposti per questo scopo, come se l'intenzione
iniziale dei progettisti fosse proprio di far passare tutti i cavi nel
collo; poi evidentemente c'è stato un cambio di idea per semplificare
il lavoro di montaggio. ProceduraPer prima cosa aprite la scatola motore della testa, togliendo il coperchio bianco. Per ogni cavo fare così: - farlo passare nella fessura in basso a destra della scatola motore in modo che entri dentro
- farlo passare attraverso il supporto ad L che è dentro la scatola subito dopo la fessura
- farlo scendere per il collo
- farlo uscire dalla fessura dell'ingranaggio bianco del collo
Per qualche cavo (encoder e motore dx/sn) è più conveniente eseguire le
operazioni con ordine inverso, cioé facendo entrare i cavi dal disco
del collo e facendoli uscire dalla fessura della scatola motore. Note - E' meglio iniziare con i cavi più sottili e inserire solo alla fine quelli più grossi (CMOS)
- Per
fare bene il lavoro occorre munirsi di un oggetto con la punta fine per
spingere i fili attraverso le fessure, ad esempio un cacciavite
piccolo, o uno stuzzicadenti
- Può essere comodo (ma non
necessario) allargare un po' la fessura della scatola motore, tagliando
un pezzettino del supporto bianco che riduce la fessura
- Può essere comodo (ma non necessario) accorciare o piegare leggermente il supporto ad L
- Può essere comodo (ma non necessario) tagliare il cavo del motore dx/sn per poi ricucirlo quando è uscito dal collo.
 Il
sistema di locomozione di I-D01 non è particolarmente efficace a
superare piccoli dislivelli che si possono trovare tra le mura
domestiche; se qualche mattonella è fuori posto, il più delle volte le
ruote motrici tendono a bloccarsi; problemi analoghi si verificano in
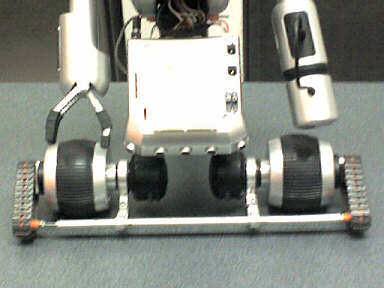
presenza di tappeti o di superfici non perfettamente lisce. Per
superare questi limiti, Papino ha avuto l'idea di cingolare le ruote, e
ci spiega come ha proceduto. "Ho acquistato un kit
di cingoli su un sito italiano di robotica, completi di
rotelline varie e 2 piastre per costruire 2 cingoli di diverse
conformazioni e lunghezze. Al primo tentativo li avevo sostituiti
completamente alle ruote, con delle difficoltà maggiori e
sollecitazioni (peso del robot) che li rovinavano molto rapidamente.
Poi mi è venuta l'idea di montarli inserendo le rotelle dentate
direttamente nei fori delle ruote (ci entrano perfetti) e bloccarli con
della colla da modellismo; rimane comunque possibile smontare le ruote
di I-D01 in quanto tutte queste rotelline/ingranaggi sono forate per
fare passare il perno (bulloncino) sul quale dovrebbero girare; ho poi
montato le rotelline anteriore su un alberino che le tiene entrambe (la
sinistra e la destra) assieme e quindi bloccate con due distanziali
(che si possono fare della lunghezza che si vuole) ottenuti da delle
piattine di alluminio che si vanno ad ancorare intorno ai supporti
delle ruote del robot. Ho preferito bloccare i cingoli leggermente
sollevati da terra, in modo che questi lavorino solo con asperità del
terreno, scalini, buchi, intoppi nei quali prima mi si piantava con
facilità; con l'occasione ho sostituito anche il ruotino posteriore con
uno di diametro maggiore, perché era l'ultimo ostacolo da superare
prima di ottenere una buona navigazione."
MOSTRINE DI FINIZIONE
autore: Enrica |
 Il materiale utilizzato è alluminio da 1,5 millimetri che con un buon paio di forbici si taglia facilmente. Il materiale utilizzato è alluminio da 1,5 millimetri che con un buon paio di forbici si taglia facilmente.
Procedere in questo modo:
- farsi regalare da qualche amico che lavora in officina dei ritagli di alluminio, tanto loro lo buttano
- tagliare una striscia lunga 8,10 cm
- procurarsi
un tubo che abbia lo stesso raggio di curvatura del pezzo che vogliamo
costruire e con i polpastrelli dei pollici premere sulla striscia di
alluminio appoggiata sul tubo, va anche bene usare un flacone spry di
lacca vecchio per sagomare l'alluminio, ottenendo un cerchio.
- estrarre
il tubo/flacone che useremo più avanti, con le forbici tagliamo di
lunghezza sempre 1mm piu grosso e iniziamo a usare la lima
per arrotondare gli spigoli adesso con cura dobbiamo fare i
fori; appoggiamo la dima che ci eravamo costruiti e tracciamo
i fori che faremo con un dremel o con piccolo trapanino fare prima
un forellino piccolo che andremo ad allargare con punte sempre piu
grandi e verifichiamo l'interasse con il modulo led che ci hanno
dato in sostituzione di quelli con i fili invertiti.
- finiti i fori si usa la lima fino a quando il pezzo non entra in sede
- applicare
del nastro biadesivo all'interno dei pezzi e incollare sul tubo,
prendere un foglio di carta vetro grana 120 e passando sempre nello
stesso verso creare la satinatura poi passare a una grana poco più
fine per rendere ben lucida
- finito senza scollare lavare con sapone e asciugare
- un leggero strato di vernice trasparente termina il nostro lavoro
- dopo
un paio d'ore anche meno se asciughiamo su un termosifone, stacchiamo
le 2 placche e togliamo il vecchio biadesivo per metterne uno nuovo e
applicheremo i pezzi finiti sopra la sede delle luci di posizione
PARAFANGHI PER LE RUOTE ANTERIORI
autore: Enrica |
 La
realizzazione dei parafanghi potrebbe sembrare a prima vista
difficile, in realtà è molto semplice; gli attrezzi da usare sono:
pinze, lima, martelletto, cartavetrata, trapanino, seghetto,
tronchesino. La
realizzazione dei parafanghi potrebbe sembrare a prima vista
difficile, in realtà è molto semplice; gli attrezzi da usare sono:
pinze, lima, martelletto, cartavetrata, trapanino, seghetto,
tronchesino. - recuperare
2 lastre di alluminio con le seguenti misure: 65 x 170, con il seghetto
fare un taglio a 70 mm senza dividere in due la lastra lasciare circa 4
mm
- avvolgere la lastra intorno ad una bottiglia che abbia il diametro leggermente superiore alla ruota
- usando
le pinze arrotondare i bordi della lastra, a piccoli passi e senza
esagerare perché si ammaccherebbe e dopo dovremmo usare più lima per
toglierne i segni; magari ripetiamo l'operazione più volte
iniziando da un lato e, finita la contornitura, ricominciamo da capo
fino ad avere la forma bombata definitiva
- adesso passiamo al
piego per la preparazione del foro: pieghiamo a mano la linguetta che
avevamo semi-staccato dalla lastra verso la parte interna e con le
pinze ripieghiamo in modo da distanziarci dal parafango di 5 millimetri,
recuperiamo una ruota e appoggiamo il parafango sopra distanziato con
uno spessore in cartoncino di circa 6 millimetri; facciamo coincidere
la linguetta con il foro del cerchio e con una punta passando
attraverso il forellino di fissaggio tracciamo il centro
- usando il trapanino facciamo un foro che allargheremo con la lima fino a far calzare sul pignone di idroid.
- con
la matita segniamo il contorno del foro di circa 4 millimetri più largo
e con il tronchese iniziamo a togliere la lamiera in eccesso
- adesso
non ci resta che usare la lima per arrotondare i bordi togliendo
solo le punte che abbiamo segnato con la pinza e modellare la staffetta
come da foto, passiamo alla finizione usando la cartavetro sempre nello
stesso verso per satinare e il gioco e fatto.
NUOVI PONTI H PER LE RUOTE MOTRICI
autore: Enrica |
Le ruote
motrici sono controllate da due ponti H che sono integrati nella scheda
base; siccome si sono verificate diverse bruciature, si è pensato
di creare due nuovi ponti H più robusti che vanno a proteggere (non
sostituire) quelli originali. Possono essere realizzati su due
piccole schedine da inserire nelle cavità nascoste sotto i coperchi
grigi della base, come mostrato nelle figure.
 
MODIFICHE PER MIGLIORARE L'ANDATURA DI DEL ROBOT
autore: Enrica |
Diversi esemplari di I-D01 presentano problemi di locomozione; fanno fatica e muoversi e piuttosto che procedere in linea retta, tendono a curvare in
maniera più o meno vistosa a sinistra; nei casi in cui il problema non si dovesse risolvere controllando e sistemando opportunamente il sistema meccanico della locomozione, si possono prendere in
considerazione uno dei seguenti progetti proposti da Enrica.
Soluzione n°1
Questa modifica prevede due passi:- sostituzione
degli alberini bianchi con due nuovi perni in metallo che vanno
attaccati sull'ingranaggio bianco degli alberini originali
- sostituzione della boccola bianca con una nuova contenente due cuscinetti.
|
|
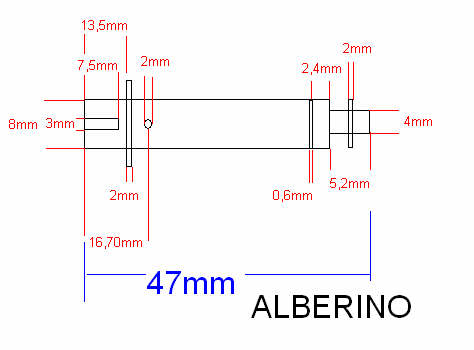
Procedere in questo modo: tornire un alberino con dischetto che andrà
avvitato sull'ingranaggio originale inserendovi per la centratura una
spina calibrata da 5 e tagliare l'albero in plastica radente
all'ingranaggio. Misure dell'alberino in metallo: diametro sede
ingranaggio, dischetto 24 per 1.8 mm, diametro alberino
per inserire cuscinetto 10 per una lunghezza di 10 mm; il restante
albero di diametro 8; la lunghezza totale dei due tronconi di diverso
diametro albero, più dischetto sarà equivalente all'originale e cioè 56
mm; ricordarsi di praticare un foro cieco di 5 mm sull'albero lato
ingranaggio per una profondità di 50 mm, e un foro passante da 2,4 che
filetteremo da 3 mm per il bloccaggio della ruota, un accenno di lima
per creare l'esagono dove si incastrerà il cerchio ruota e il lavoro è
finito.
Caratteristiche cuscinetti
- lato albero ingranaggio: diametro interno 10, esterno 19, spessore 5.
- lato ruota: diametro interno 8, esterno 16, spessore 4.
- boccola
lato ingranaggio: diametro interno 19, esterno 25, spessore 16,
profondità battuta cuscinetto 5, diametro passante foro boccola 13.
- boccola lato
cerchio: contiene n°2 cuscinetti a sfera; misure boccola diametro
interno 16, esterno 29, spessore 20, profondità battuta lato cuscinetti
10 diametro passante foro boccola 8.1; profondità lato mozzo 4 avente
il diametro 23 che calza sul mozzo
Realizzare i tre fori come
da boccola origine per il fissaggio. Questa soluzione elimina
completamente le oscillazioni utilizzando gli alberini originali ma
modificandoli.
 Soluzione n°2 Soluzione n°2
Questa soluzione è più efficace della precedente e anche più semplice da realizzare. La modifica n°1 è un po' critica per il centraggio tra alberino e fissaggio su corona in plastica, che ora è risolto rendendo rigido l'albero sulla parte finale e inserendo un cardano tra albero con corona e albero in metallo; il tutto è montato su cuscinetti a rullo, che hanno il vantaggio di lavorare la boccola d'alluminio solo praticando un foro passante, mentre nella precedente versione bisognava creare la sede dei 2 cuscinetti. Viene inserita una spina sul lato ruota che serve a non farla scivolare, essendo adesso montata su albero tondo, soluzione necessaria per non praticare una lavorazione di fresa per realizzare l'esagono; ovviamente nella ruota bisogna praticare la relativa sede. L'albero è trattenuto in posizione da una rondella di rasamento e da un seger. Questa
soluzione permette inoltre di rendere più rigide le ruote sotto il peso
del robot, evitando il problema dell'imbarcamento al centro.
Soluzione n°3
E' uguale alla n°2, salvo il fatto che le boccole con cuscinetti a sfera sono sostituite da bronzine che sono più economiche.
|
 I-DROID01
I-DROID01