
ultimo aggiornamento 14 gennaio 2012
|
|
ultimo aggiornamento 14 gennaio 2012 |
|
|
|
Dopo aver montato, il nostro robot ora lo doteremo di nuovi sensi. Oltre al tatto, gli forniremo la vista tramite sensori ad infrarossi e fotoresistori, l'udito tramite un microfono e la voce con un buzzer.

|
|
La scheda descritta in questa pagina
è oggetto di un articolo pubblicato sul
numero 265 pubblicato nel mese
di Giugno/Agosto
della rivista
Fare
Elettronica. |
|---|
Se per i sensori ad infrarossi e di contatto utilizzeremo i contatti
presenti sulla scheda madre, per quanto riguarda gli altri sensori ho
proceduto a realizzare un apposito circuito stampato su cui trova posto
anche il modulo dei motori già utilizzato nella
scheda ponte H
A
questo punto del progetto ecco l'elenco delle porte del processore
utilizzate
|
|
Scheda sensori
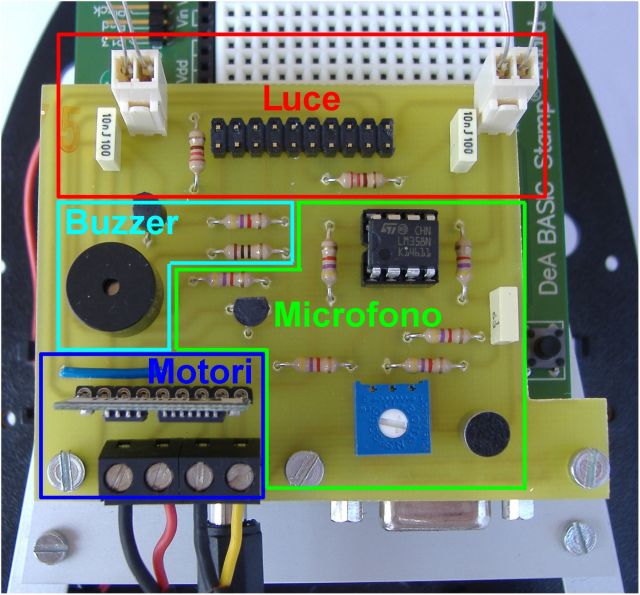
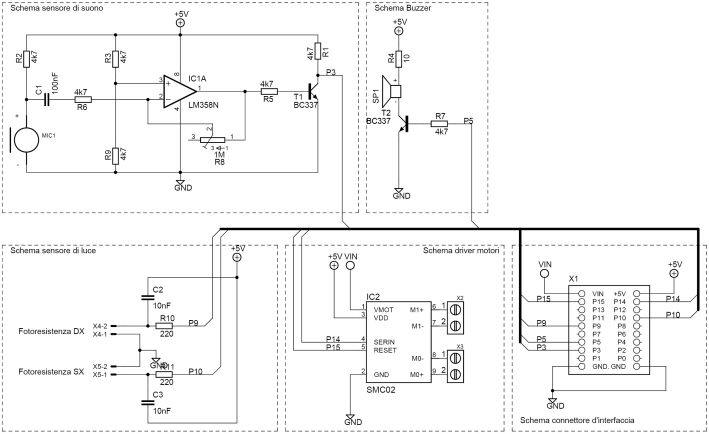
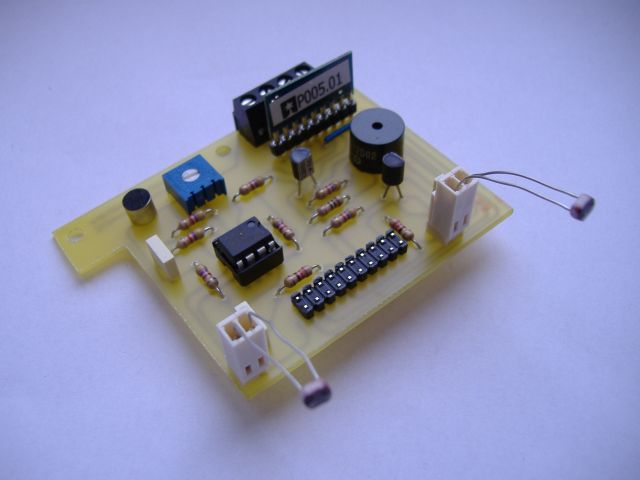
Per l’implementazione dei nuovi sensori e per il pilotaggio dei motori ho realizzato un’apposita scheda il cui circuito elettrico è visibile sotto
|
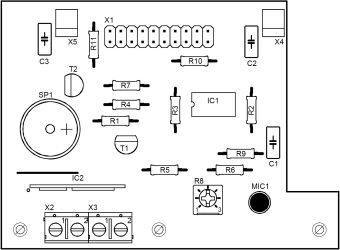
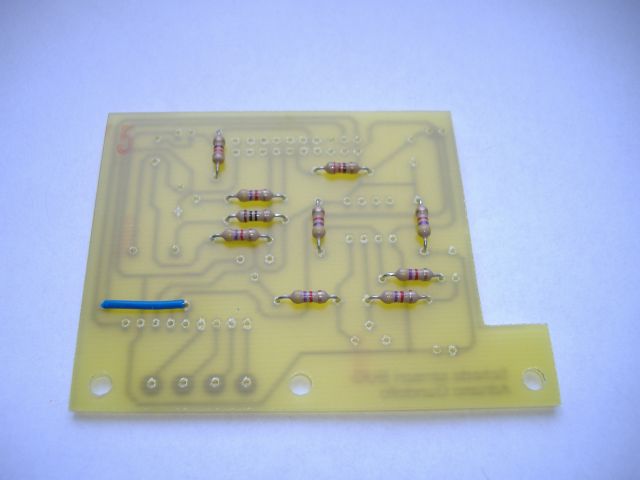
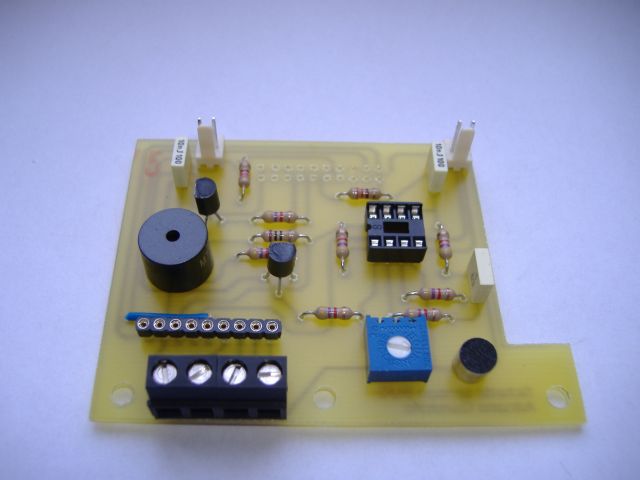
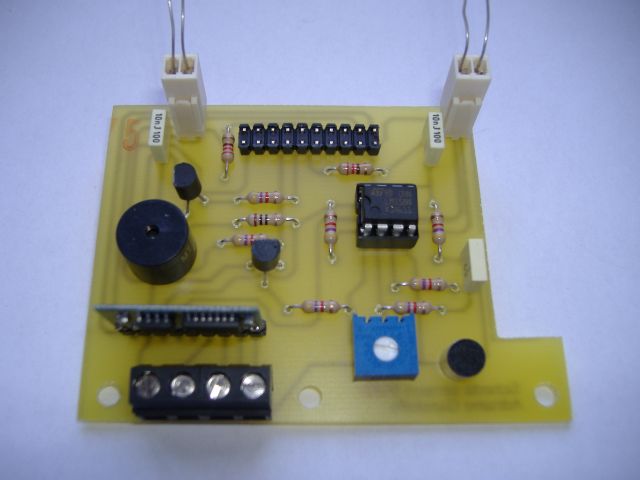
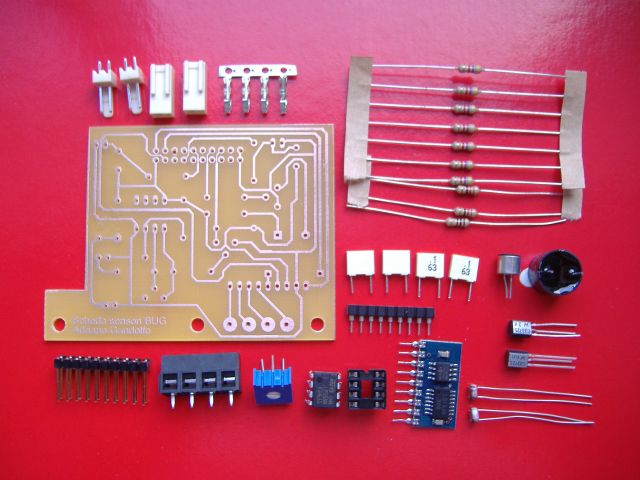 Foto dei componenti e del circuito stampato
|
||||||||||||||||||||||||||||||||
 |
 |
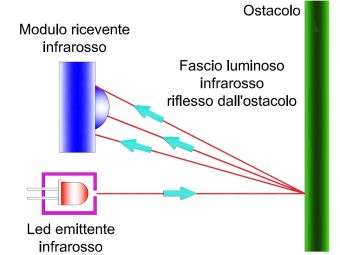
Sezione dei sensori ad infrarossi
La sezione dei sensori ad infrarossi, in cui schema di collegamento è visibile sotto, sfrutta i connettori posti nella parte frontale della scheda
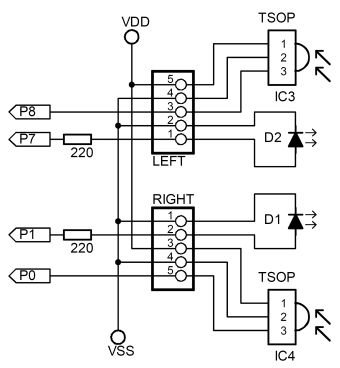
Gli emettitori (D2 e
D2) sono formati da diodi, led, emettitori nel campo degli infrarossi con
una lunghezza d’onda λ di circa 940 ÷ 950 nm come il diodo QEC112 113
della Fairchild e solo collegati tramite una resistenza da 220 Ώ alle
porte P1 e P7 del processore.
I ricevitori (IC3 e IC4) sono dei circuiti
integrati usati normalmente nei ricevitori per telecomandi a raggi
infrarossi.
La loro frequenza di ricezione è di 36 KHz come i TSOP 1836
della VISHAY e sono connessi alle porte P0 e P8.
Il loro principio di
funzionamento è visibile nella figura sotto.
 |
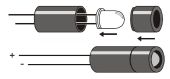 |
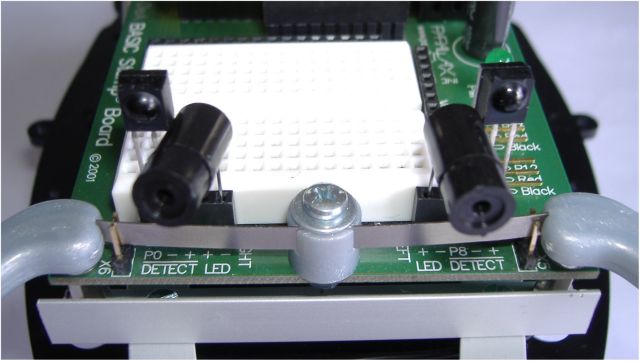
| Foto di dettaglio del montaggio sezione infrarossi | Per essere meglio direttivi i diodi led andranno inseriti all’interno di un contenitore come indicato nella figura |
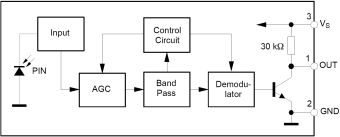
Schema a blocchi del sensore ad infrarosso
| Photo Modules for PCM Remote Control Systems tipo TSOP 1836 | ||
 1-OUT 2-GND 3-Vcc |
|
|
| Piedinatura | Datasheet | Foto del sensore |
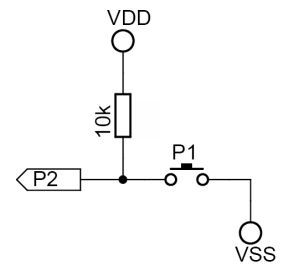
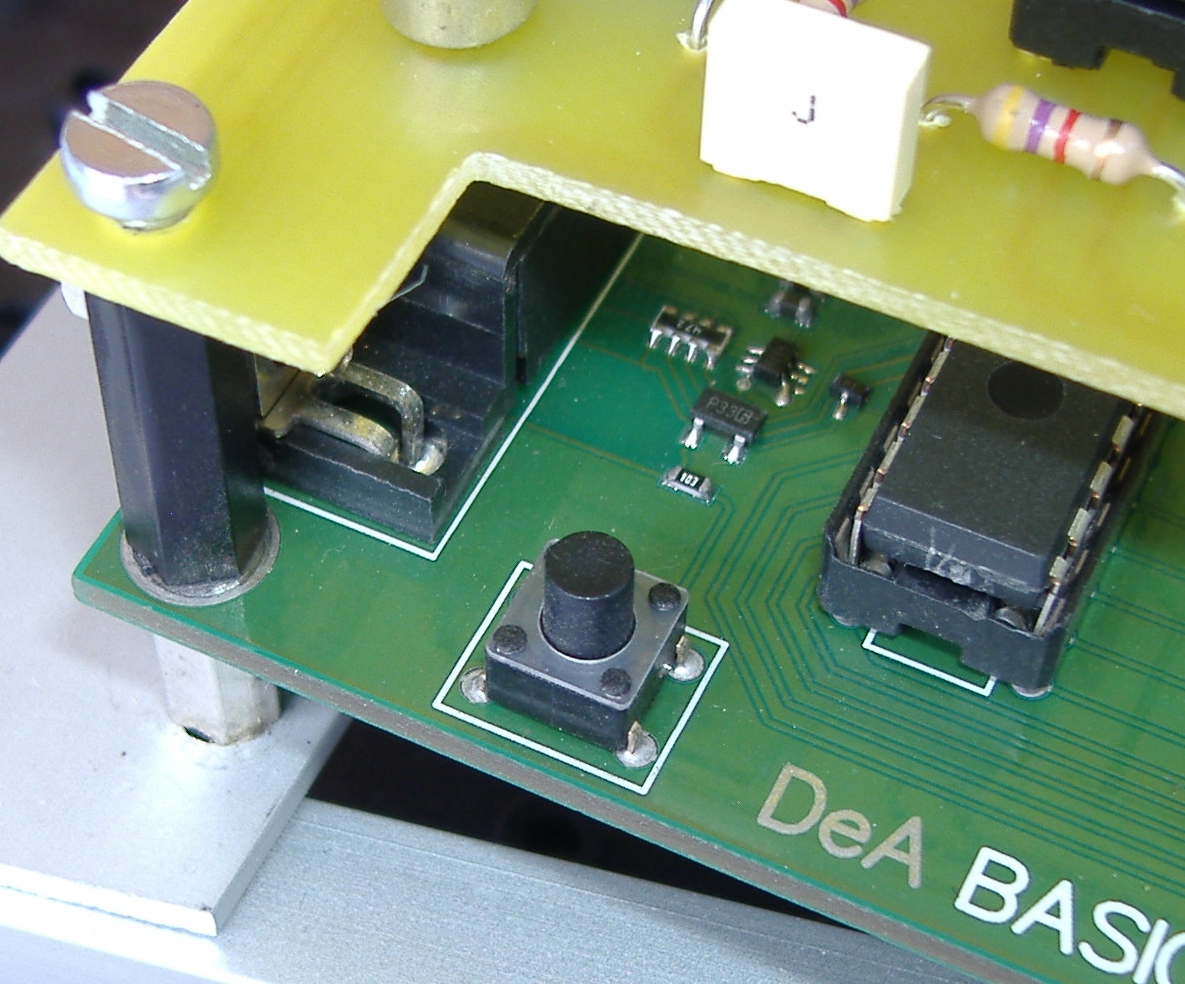
Pulsante di controllo su scheda madre
Il pulsante di controllo è già presente sulla scheda principale ed è collegato alla porta P2 del processore come visibile nello schema
| Schema elettrico del pulsante | Posizione pulsante di controllo |
 |
 |
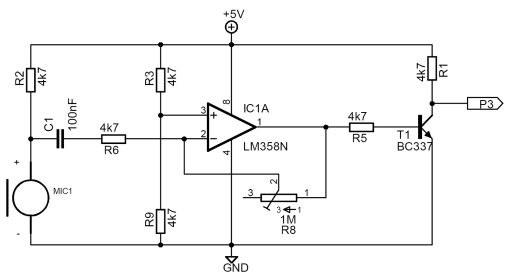
La sezione microfonica, il cui schema elettrico è visibile sotto è
formata da una capsula microfonica pre-amplificata collegata ad uno stadio
di amplificazione formato dall’integrato LM358 il cui guadagno è regolato
dal trimmer R8.
Il segnale è disponibile per essere inviato alla porta P3
del processore sul collettore del transistor T1 un transistor NPN tipo
BC337.
| LM 358 Low Power Dual Operational Amplifiers | ||
 |
|

|
| Piedinatura | Datasheet | Foto dell'integrato |
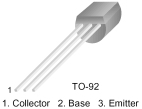
| Transistor BC337 (NPN Switching and Amplifier Applications ) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor |
L’istruzione utilizzata nel programma è: PULSIN Pin, Stato, Variabile.
|
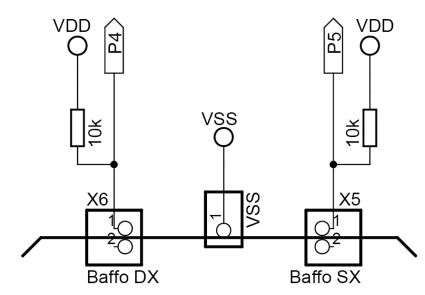
Sezione dei sensori di contatto. La sezione dei sensori è illustrata nell'apposita pagina, lo schema è visibile sopra. I sensori sono collegati alle porte P4 e P5 del processore.
|
La sezione buzzer il cui schema è visibile in figura, è formata da una capsula buzzer pilotata tramite il transistor T2 un BC337 comandato a sua volta dalla porta P5 del processore. L’istruzione utilizzata nel programma è: FREQOUT Pin, Durata, Frequenza.
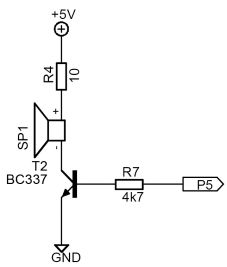 Schema elettrico sezione buzzer |
 |
| Transistor BC337 (NPN Switching and Amplifier Applications ) | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del transistor |
Nella sezione sensori di luce, sono presenti due foto resistenze connesse alle porte P9 e P10 del processore. La luce variando la resistenza, modifica il parametro caratteristico del circuito in cui è presente un condensatore: la costante di tempo. Il valore di tale parametro risulta essere (per ragioni fisiche) inversamente proporzionale all'intensità luminosa rilevata. L’istruzione utilizzata nel programma è: RCTIME Pin, Stato, Variabile.
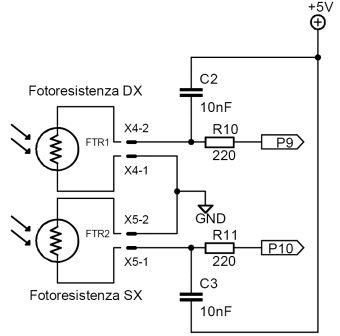
Schema elettrico della sezione del sensore rilevatore di luce
Cosa sono le Fotoresistenze
Si tratta di resistenze il cui valore dipende dall’intensità e dal colore della luce che le colpisce; in genere sono dei sottili film di solfato di cadmio su un supporto rigido, chiusi in involucri protettivi trasparenti. Data la struttura fisica, si comprende come questi non siano quasi mai elementi di potenze elevate; valori caratteristici della massima potenza dissipabile sono sui 50mW per le più piccole, circa 1 W per le più grosse.
 |
 |
Le fotoresistenze sono caratterizzate dalla curva di sensibilità, cioè dal colore al quale sono maggiormente
sensibili e dai valori della resistenza al buio e alla luce forte, dette valore di buio e valore di luce; si ha indicativamente:
valore di buio: qualche Mohm
valore di luce: intorno al Kohm.
Il campo di variabilità è quindi molto elevato, dell’ordine di 1000.
La
loro caratteristica di illuminazione è definita dall’equazione
R= ALa
dove:
R è la resistenza del
componente in ohm
A è la resistenza in condizioni di illuminamento unitario in ohm
L è l’intensità della radiazione luminosa espressa in lux
a
è una costante che varia tra 0.7 e 0.9.
Quindi, date la resistenza di buio e di luce, si può tracciare una
caratteristica rettilinea (in scala logaritmica) che approssima abbastanza
bene quella reale (vedi grafico).
Bisogna però tener presente che questi elementi sono “lenti”
(variazione di circa 200 Kohm/s) cioè se la luce varia rapidamente non è
detto che il valore della resistenza la segua con la stessa legge.
| ' {$STAMP BS2} ' {$PBASIC 2.5} '************************************************************************* 'Collaudo scheda sensori BUG 'Sezione fotoresistori 'di Adriano Gandolfo 'sito www.adrirobot.it '************************************************************************* RC_DX CON 9 RC_SX CON 10 result_DX VAR Word result_SX VAR Word Main: HIGH RC_DX ' carica il condensatore C1 PAUSE 1 ' per 1 ms RCTIME RC_DX, 1, result_DX ' misura il tempo di scarica RC fotoresistenza destra HIGH RC_SX ' carica il condensatore C2 PAUSE 1 ' per 1 ms RCTIME RC_SX, 1, result_SX DEBUG HOME, "Controllo delle fotoresistenze", CR, ' misura il tempo di scarica RC fotoresistenza sinistra "Valore SX Valore DX" , CR, "--------- ---------", CR, " " DEBUG CRSRXY, 3, 3, DEC result_SX, CRSRXY, 14, 3, DEC result_DX GOTO main END |
La sezione per il pilotaggio dei motori è identica a quella della scheda del ponte H
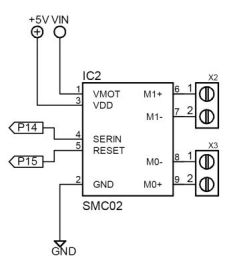
Schema elettrico pilotaggio motori
Si basa sul
Micro Dual Serial Motor Controller che è una piccola schedina
prodotta dalla Pololu Robotics and Electronics, in cui è presente un
doppio ponte H formato dall'integrato LB 1836M (prodotto dalla SANYO) e un
PIC12F629 (prodotto dalla Microchip) per la gestione del ponte e per la
comunicazione seriale con la scheda di controllo.
Questo controller consente di pilotare due motori CC fino ad 1A di
assorbimento con 127 passi di velocità in due direzioni tramite semplici
comandi.
|
||||||||||||||||||
|
|

Foto del collegamento dei motori alla morsettiera
Sulla scheda è presente il connettore X1 che andrà collegato al relativo connettore X7 presente sulla DeA Basic Stamp Board. Tramite questa, si realizza la connessione che permette il collegamento tra le linee: Vss (GND), Vdd (+5V), Vin( V batterie), P3, P5, P9, P10, P14, P15.
 |
 |
Per la realizzazione della scheda occorre preparare un’apposito
circuito stampato, una volta scaricato il PDF del circuito stampato si
potrà usare il sistema di produzione del circuito che meglio preferite.
Io personalmente utilizzo quello del trasferimento diretto utilizzando
dei fogli blu, oppure si utilizza il bromografo.
|
|
|
| Circuito stampato (lato rame) | Disposizione componenti |
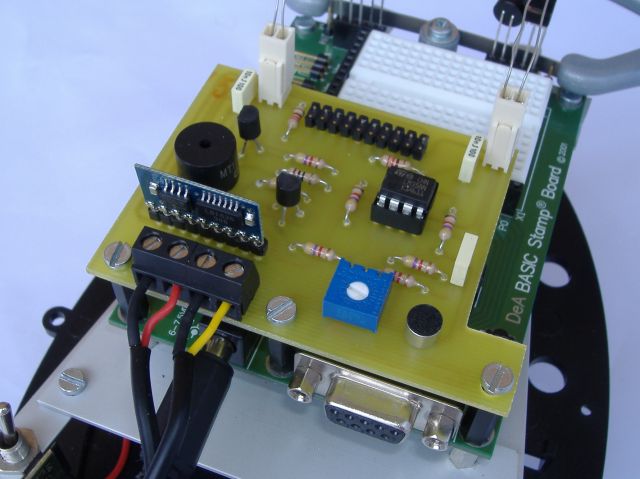
Una volta realizzato e forato il circuito stampato si passerà alla
saldatura dei componenti, seguendo la disposizione riportata in figura.
Conviene partire da quelli a basso profilo come il ponticello le resistenze, si
proseguirà poi con lo zoccolo per l’integrato, i condensatori, il trimmer,
il buzzer e i transistor, connettori per fotoresistenze.
Per quanto
riguarda il connettore X1 questo è da saldare con attenzione in modo da
non creare dei cortocircuiti tra le piste, conviene saldare solo i pin
necessari, tralasciando gli altri.
 |
 |
 |
 |
 |
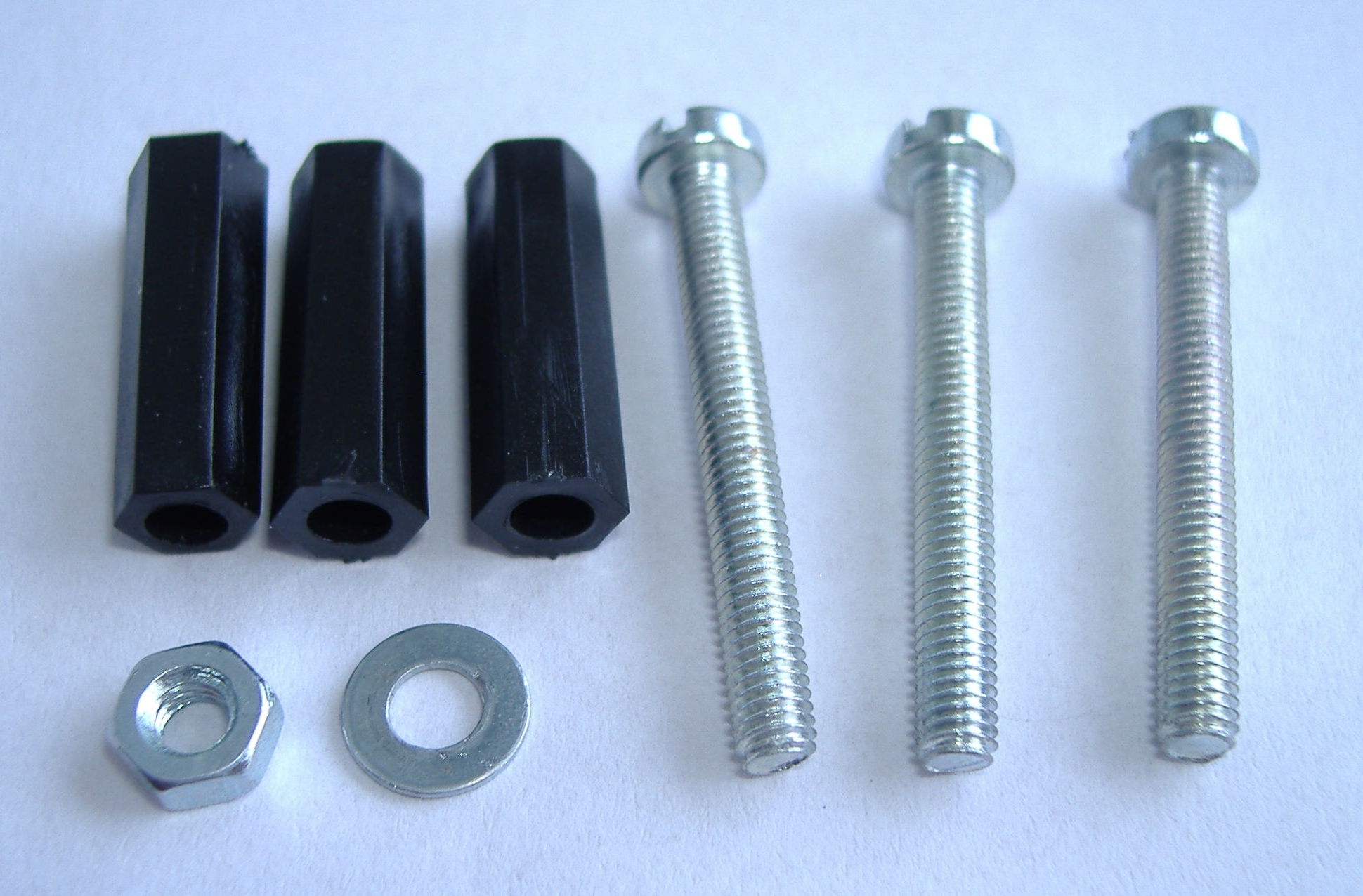
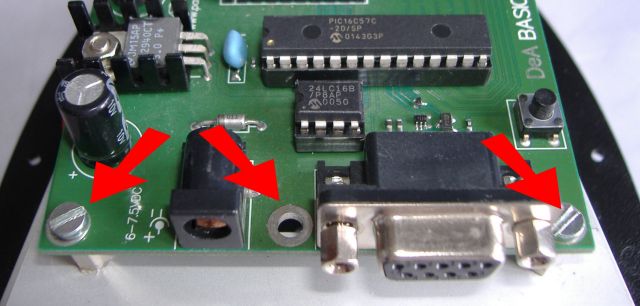
Per l’installazione sul robot occorrerà estrarre prima di tutto la scheda motore eventualmente già montata, il cui integrato sarà utilizzato sulla scheda sensori; si sviteranno le due viti posteriori che fissano la scheda base al telaio e si installerà la nuova scheda infilando con attenzione il connettore su quello presente sulla scheda madre e fissando il tutto con l’aiuto della minuteria visibile nella figura12 e cioè: 3 distanziali plastici lunghi 17 mm, 3 viti testa cilindrica M3x20, 1 dado M3 una rondella.
 |
 |
 |
| Minuteria per montaggio scheda | Punti di fissaggio scheda |
Tranne il sensore di rumore che possiede un trimmer che ne regola la sensibilità nessuno degli altri sensori necessita di taratura, ma nel caso si volesse effettuare un controllo, si possono utilizzare i programmi che trovate sotto. Essi una volta caricati nella memoria del processore permetteranno la verifica dei vari sensori.
Link utili
|
Sito del produttore del modulo di comando dei motori (Pololu): |
|
|
Sito del produttore della scheda di comando (Parallax) : |
|
|
Sito di un'altro distributore italiano della Parallax (Elettroshop): |
|
|
Sito robot Cybot della DeAgostini: |
www.realrobots.ideahobby.it (non più attivo) |
|
Sito robot Panettone della DeAgostini: |
www.robot.deagostini.it/lab/cose.html. (non più in linea) |
| Elenco revisioni | |
| 14/01/2012 | Aggiornato pagina |
| 03/12/2007 | Inserito richiamo all'articolo pubblicato sulla rivista Fare Elettronica. |
| 14/09/2007 | Emissione preliminare |