![]()
ultimo aggiornamento 25 agosto 2008
|
|
ultimo aggiornamento 25 agosto 2008 |
|
|
|
|
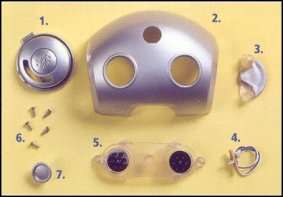
La prima fase prevede la costruzione della
TESTA del robot, questa fase viene realizzata con i componenti allegati ai
primi 6 fascicoli. |
|

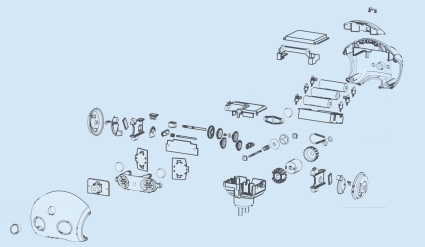
FOTO DELLE FASI DI MONTAGGIO TESTA
|
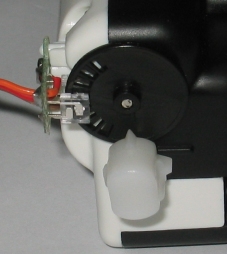
Ecco di lato la foto in dettaglio dell'encoder, è visibile la basetta e il disco con le fessure che bloccando il flusso luminoso (infrarosso) fanno si che il processore "contando" queste fessure stabilisca di quanto è ruotata la testa |
 |
 |
 |
 |
| Foto dei due orecchi di I-Droid 01 | Dettaglio della basetta con il led installata nell'interno delle orecchie |
 |
 |
 |
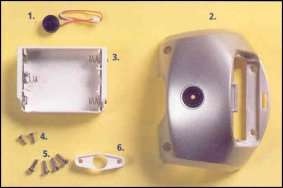
| Foto di uno dei tre microfoni posizionati nella testa di I-Droid 01 e che permettono di stabilire da dove proviene il suono | Foto del sensore di sfiorimento, realizzato con una semplice basetta ramata | Foto del motore a corrente continua da installarsi all'interno del motoriduttore posto all'interno della testa di I-Droid 01 - Notare la piccola puleggia a gola posta sull'albero motore per la cinghia di trasmissione |
 |
 |
 |
| Parte frontale della testa | ||
 |
 |
| Parte posteriore testa | |
 |
 |
| Montaggio gruppo motore | Collegamento della scheda di controllo |
 |
 |
![]()
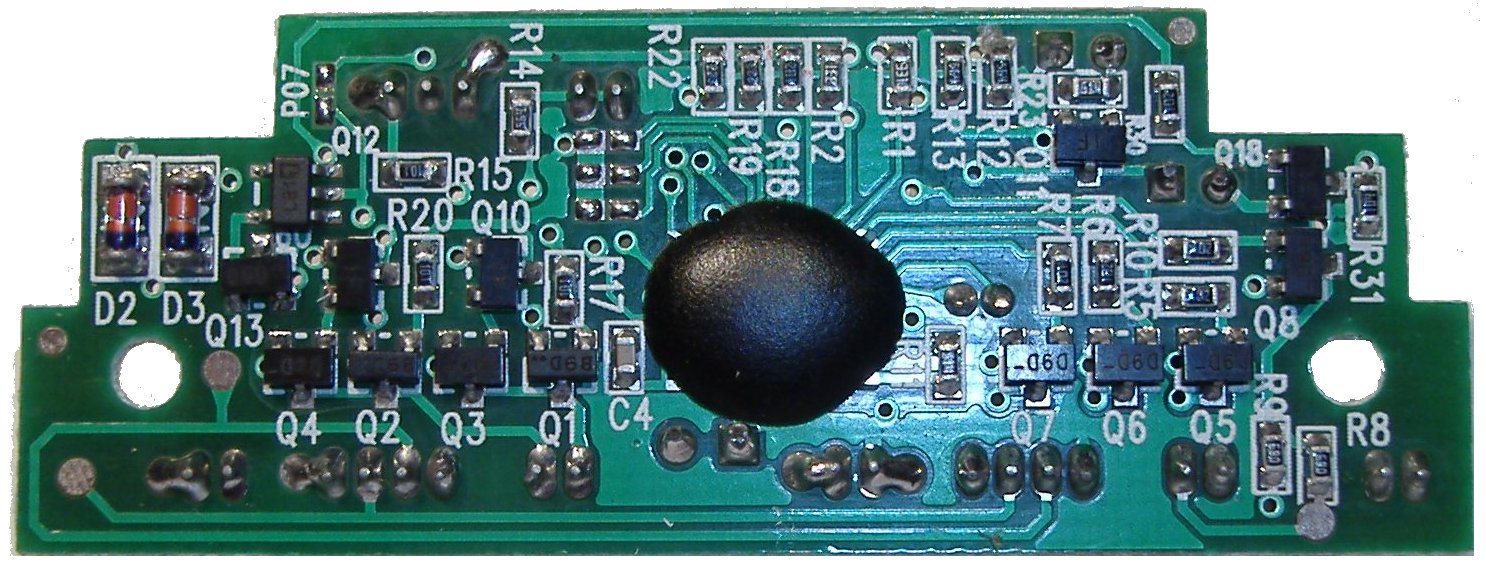
| FOTO DELLA SCHEDA DI CONTROLLO | |
 |
 |
| Scheda controllo lato processore | Scheda controllo lato connettori |
![]()
| Funzionamento della testa Facciamo il punto sull’assemblaggio del nostro piccolo robot al termine della sesta uscita. Vediamo il funzionamento corretto della testa con il solo "touch sensor" montato: 1) dopo aver disposto la testa in posizione orizzontale, si deve attendere qualche secondo per permettere al sensore di tararsi rispetto all'ambiente in cui si trova; 2) se si appoggia leggermente la mano in corrispondenza del sensore, la testa si muove verso il basso illuminando le orecchie e gli occhi di giallo. Una volta arrivata a fine corsa verso il basso, prima si spengono le orecchie e i led gialli e, subito dopo, lampeggiano 5 volte i led rossi degli occhi; 3) sfiorando successivamente ancora il sensore, la testa inizia a muoversi verso l'alto illuminando solamente i led verdi degli occhi. Anche in questo caso, raggiunto il fondo corsa in alto, prima si spengono i led verdi e, subito dopo, lampeggiano 5 volte i led rossi degli occhi; 4) a ‘riposo’, con la testa ferma, tutti i led sono spenti. Alcune note: 1) Il fotoaccoppiatore alla base del funzionamento dell'encoder lavora a infrarossi quindi non è possibile vedere nulla ad occhio nudo! 2) Il gommino che si trova nel ‘cassetto’ all’interno del quale viene inserita la piccola lamina metallica del sensore non deve essere tolto. Serve a tenere il sensore il più vicino possibile alla parte superiore della testa. 3) Non confondere i connettori a 2pin fra di loro; è infatti possibile inserire erroneamente un microfono (che in questa fase non va ancora collegato) al posto del motore, dei led delle orecchie, ecc. Alcuni suggerimenti ai possibili problemi: 1) Se la testa, muovendosi, arriva in posizione alta o bassa facendo scattare la frizione di protezione degli ingranaggi, ci possono essere due ragioni: a) l'encoder è allineato male, quindi il limite fisico di movimento della testa non coincide con quello letto dall'encoder. Per questo motivo il sensore "pensa" di poter far muovere ancora la testa quando invece si è già raggiunto il limite meccanico; b) i cavi/connettori dei microfoni si incastrano tra il pacco batterie e il gearbox, limitando l'escursione possibile per la testa. Bisogna controllare che i cavi (soprattutto quelli non ancora connessi) non vadano ad intralciare il movimento della testa. 2) Se funzionano i led ma non il motore, molto probabilmente il problema è nel motore stesso o nel gearbox. Per verificare che non sia incastrato il gearbox per problemi legati al montaggio, si può smontare il motore e farlo funzionare "a vuoto" fuori dal gearbox con tutti i collegamenti predisposti come da fascicolo. Se il motore gira a vuoto dopo aver sfiorato la testa, il problema è negli ingranaggi del gearbox. Se invece non da segno di vita, il problema è probabilmente in un errato collegamento del motore (è stato collegato al connettore "motor" sulla scheda?), in un difetto nel cavo del motore oppure in un effettivo guasto del motore. Per essere sicuri che il motore non sia danneggiato, è possibile collegarlo direttamente al pacco batteria o a qualsiasi sorgente di alimentazione inferiore a 4,5VDC tramite due pezzetti di materiale conduttore. Se il motore funziona quando viene collegato direttamente all'alimentazione e non funziona quando è collegato alla schedina del Touch Sensor, il problema potrebbe essere dovuto ad alcuni transistor bruciati sulla schedina stessa. 3) Il movimento della testa funziona anche con l'encoder non collegato. In questo caso l'escursione della testa risulta leggermente più breve perchè, non leggendo il segnale dell'encoder, il sensore blocca il motore dopo un breve periodo. È importante porre l'attenzione sul fatto che il "touch sensor" ha la funzione principale di sensore e che, in questa fase intermedia, controlla anche il motore e l'encoder solo per iniziare a vedere i primi movimenti della testa e per controllare che tutti i led della testa funzionino correttamente. In seguito passerà solo l'informazione dell'avvenuta ‘carezza’ al modulo Head Controller/SoundFollower che gestirà in maniera più completa entrambi i motori della testa. |
![]()
|
| N.B. Le pagine delle istruzioni sono tratte dal sito originale della DeAgostini http://www.i-droid01.com |
![]()
| Elenco revisioni | |
| 25/08/2008 | Modificato layout pagina, aggiunto link per dettagli su scheda controllo sensore di contatto testa |
| 23/11/2005 | Aggiunto link per visione copertina in scala maggiore |
| 09/11/2005 | Aggiunto link con istruzioni di montaggio |
| 03/11/2005 | Aggiunto componenti sesto e ultimo fascicolo, immagini scheda di controllo. |
| 05/10/2005 | Aggiunto istruzioni di montaggio, foto del montaggio |
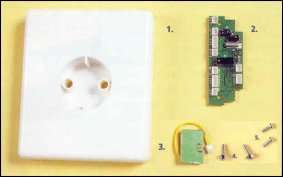
| 28/09/2005 | Aggiunto immagini copertina fascicolo, blister, e pezzi |
| 16/09/2005 | Emissione preliminare |
![]()