![]()
ultimo aggiornamento 25 agosto 2008
|
|
ultimo aggiornamento 25 agosto 2008 |
|
|
|
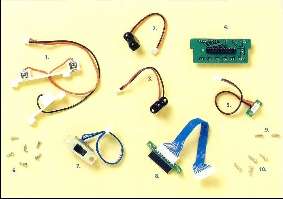
La seconda fase prevede la costruzione del
sistema uditivo, collo, vano batterie.
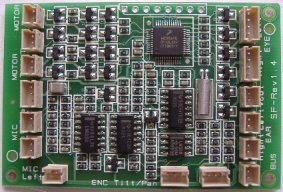
I microfoni ed il
modulo sound follower
installati nella testa permetteranno a I-Droid01 di reagire agli
stimoli sonori e individuarne la provenienza.


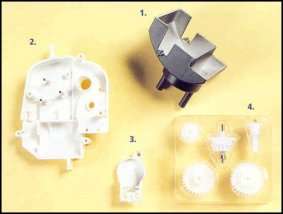
Vista interna della scatola di riduzione per la rotazione della testa
Vista esterna della scatola di riduzione per la rotazione della testa
Dettaglio del pignone di uscita
La foto riporta il numero
di denti dei vari ingranaggi che formano la scatola di riduzione
utilizzato per la rotazione della testa.
Il moto tra il motore e il primo ingranaggio è trasferito tramite un
cinghiolo.
E' inoltre presente un giunto di protezione che in caso di blocco non
blocca il motore
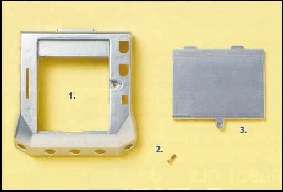
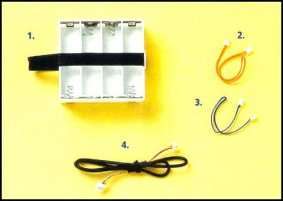
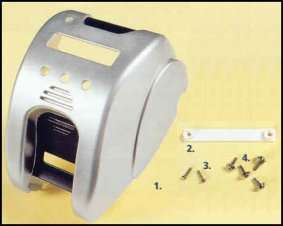
Porta batteria
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
 |
 |
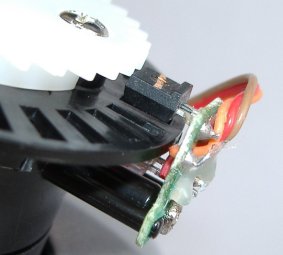 |
| Foto sensore encoder | Disco encoder | Accoppiamento disco-encoder |
 |
 |
| Circuito connettore lato connettori | Circuito connettore lato robot |
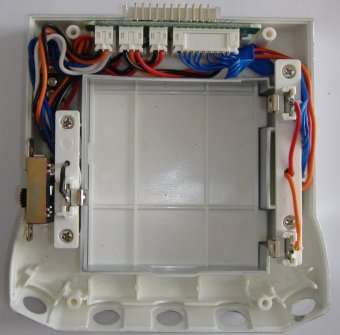
Vista d'alto marsupio aperto

Foto marsupio chiuso,
in primo piano
i fori per i sensori sonar

Dettaglio connettori interni marsupio
Descrizione connettori
Fase di montaggio della scheda head controller - sound follower
Dettaglio
interno della testa con il collegamento del solo
sensore di prossimità alla scheda connettori

nterno della testa con la head controller - sound follower montata

Foto del robot alla fine del montaggio di questa fase
![]()
|
![]()
| Elenco revisioni | |
| 25/08/2008 | Modificato layout pagina |
| 22/02/2006 | Aggiunto materiale inerente fascicoli 14-15-16-17 |
| 23/11/2005 | Aggiunto materiale inerente fascicoli 10-11-12-13 |
| 09/11/2005 | Emissione preliminare |
![]()