
![]()

ultimo aggiornamento 2 febbraio 2007
|
|
ultimo aggiornamento 2 febbraio 2007 |
|
|
|
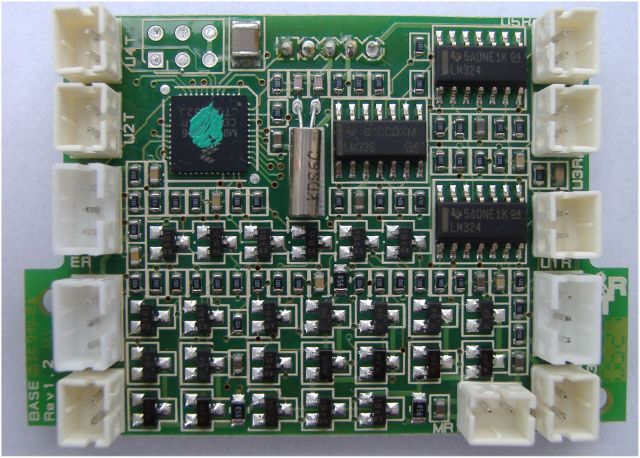
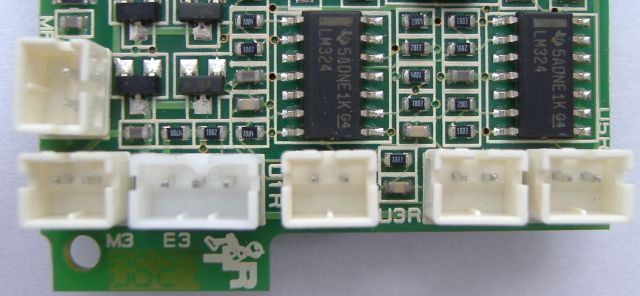
Il modulo chiamato
'Base
Controller' del
robot I-Droid 01 è basato su un microcontrollore
MC9S08GT16 a 8 bit, dotato
di 16 KB di memoria Flash e 1 KB di RAM. Gestisce i due motori delle ruote del
robot e i relativi encoder ottici, nonché il motore che permette al robot di
'alzarsi e sedersi'.
Oltre al processore sono presenti un integrato
LM324 un quadruplo amplificatore operazionale e due
LM339 un quadruplo comparatore di tensione, facenti
parte del circuito di trattamento sei segnali degli encoder e dei sonar.
Sono inoltre presenti 25 transistor SMD (con sigla
1bt, 3FW, FFH, FDV) molti dei quali fanno parte dei tre ponti H
per il pilotaggio dei tre motori.
La basetta multistrato delle dimensioni massime di 58x40 mm riporta
sulla busta antistatica il codice 5136CMC060 versione SW BASE 10 IT, mentre
sulla scheda è riportata la scritta BASE rev. 1.2
La scheda Inoltre supervisiona direttamente i cinque
sensori a ultrasuoni (due trasmettitori e tre ricevitori) che permettono
al
robot I-Droid 01 di 'vedere' gli ostacoli posti intorno a lui.
Le informazioni provenienti dai sensori sono rese disponibili sul bus di
comunicazione
 |
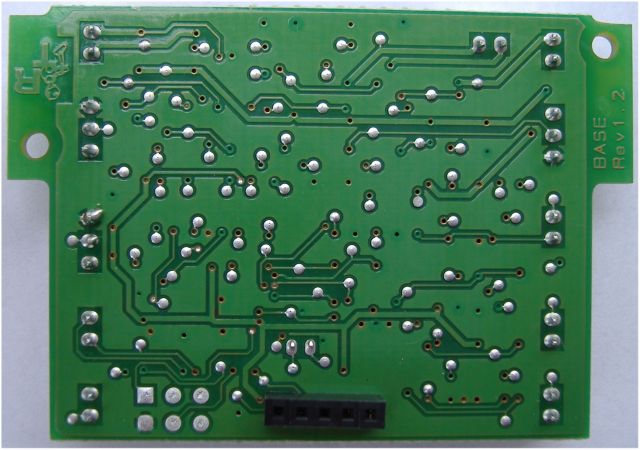 |
| Scheda lato componenti | Scheda lato rame |

| Processore MC9S08GT16 | ||
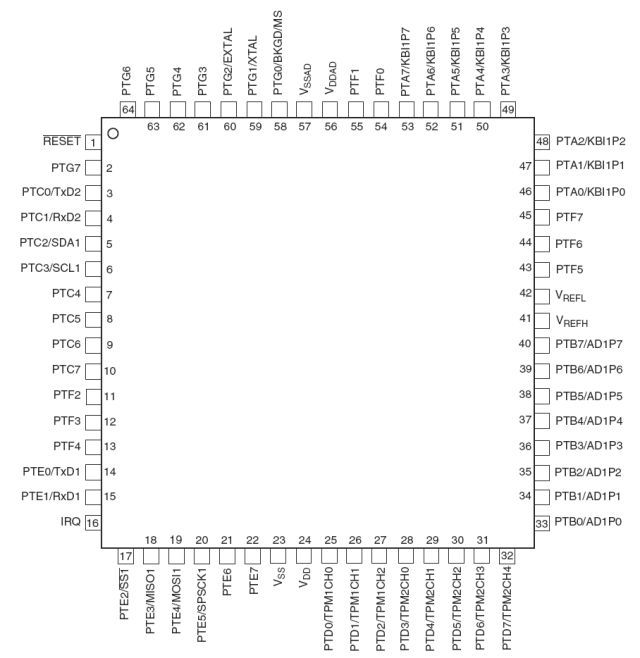 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LM 324 Quadruplo amplificatore operazionale a bassa potenza | ||
 |
Codice RS - 536-1316 |

|
| Piedinatura | Datasheet | Foto dell'integrato |
| LM 339 Quadruplo comparatore di tensione, bassa potenza, basso Offset | ||
 |
Codice RS - 517-2419 |
 |
| Piedinatura | Datasheet | Foto dell'integrato |
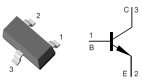
| Transistor BC846 (1Bt SMD) compatibile con BC546B | ||
 |
|
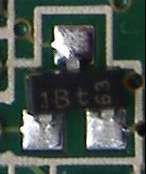 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| IL MICROPROCESSORE The MC9S08GT16 is a member of the low-cost, high-performance HCS08 Family of 8-bit microcontroller units (MCUs). All MCUs in the family use the enhanced HCS08 core and are available with a variety of modules, memory sizes, memory types and package types.
The HCS08 Family is an extension of the HC08 Family,
offering extended battery life with maximum performance down to 1.8V,
industry leading Flash and innovative development support.
MC9S08GT16 Features
|
|
|
|---|
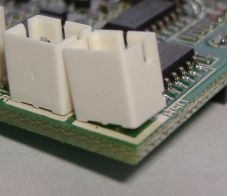
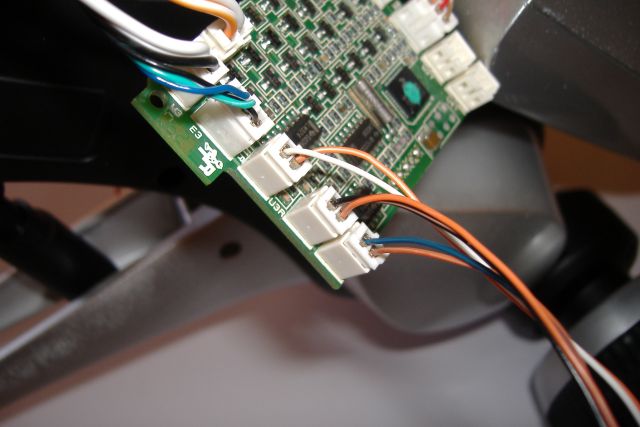
DETTAGLI DEI CONNETTORI
|
|---|
|
|---|
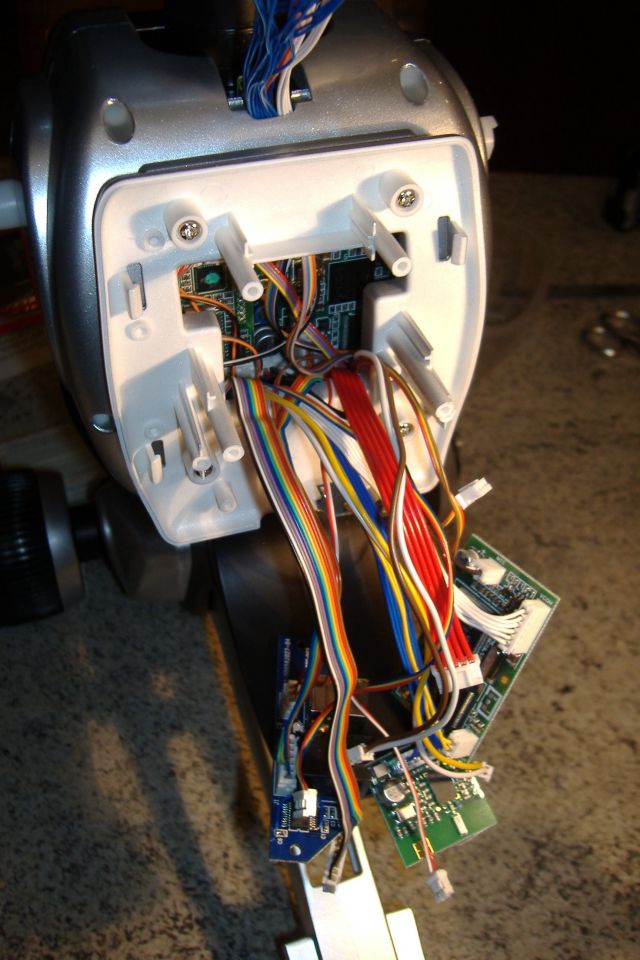
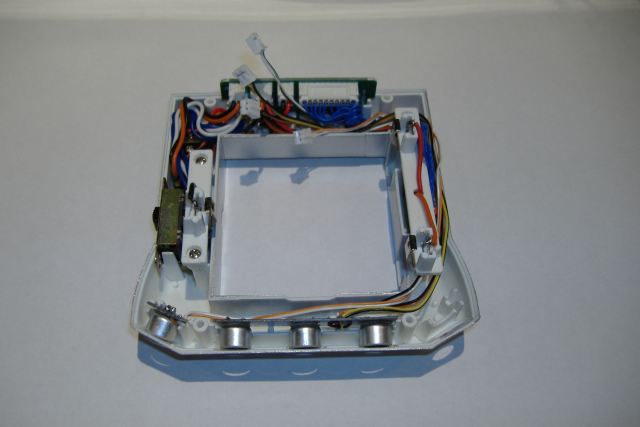
| Montaggio modulo BASE | |||||||||||
|
| Elenco revisioni | |
| 02/02/2007 | Inserito fasi di montaggio modulo base. |
| 07/12/2006 | Emissione preliminare |












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}