
![]()
![]()
ultimo aggiornamento 2 febbraio 2007
|
|
ultimo aggiornamento 2 febbraio 2007 |
|
|
|
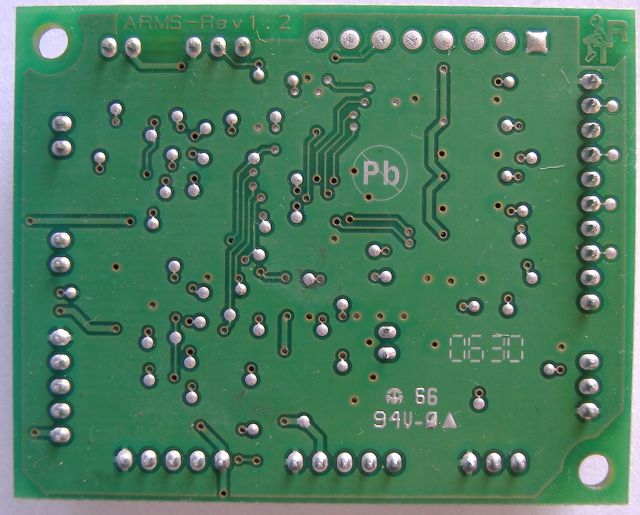
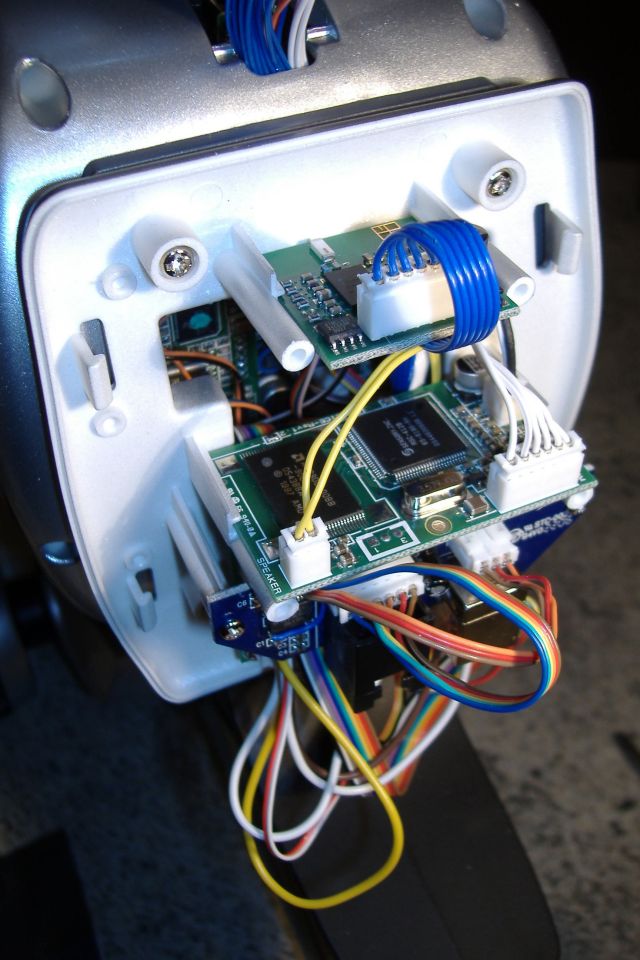
l modulo Arms Controller
utilizzato dal
robot I-Droid 01 è equipaggiato con un microcontrollore
MC68HC908AP8
a 8 bit, dotato di 8 KB di memoria Flash e 1 KB di RAM, gestisce i
motori e i relativi encoder ottici delle braccia, da cui il suo nome
(infatti 'braccia' è la traduzione di arms).
Inoltre controlla il
sensore di temperatura,
le luci di posizione,
i taci eventualmente collegato alle braccia, nonché tutti gli ingressi e
le uscite , general purpose' disponibili sulla breadboard montata al di sopra dei marsupio
del robot
I-Droid 01.

|
 |

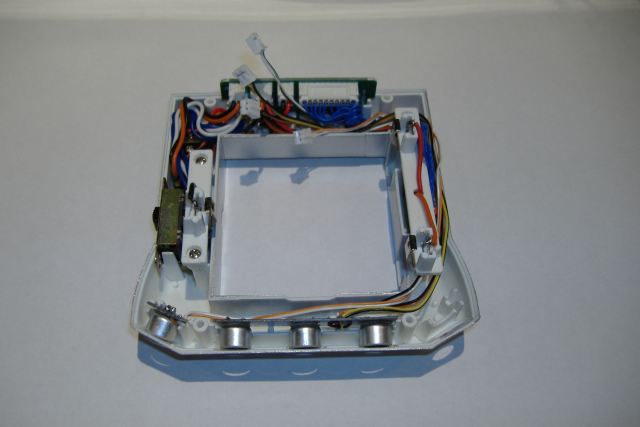
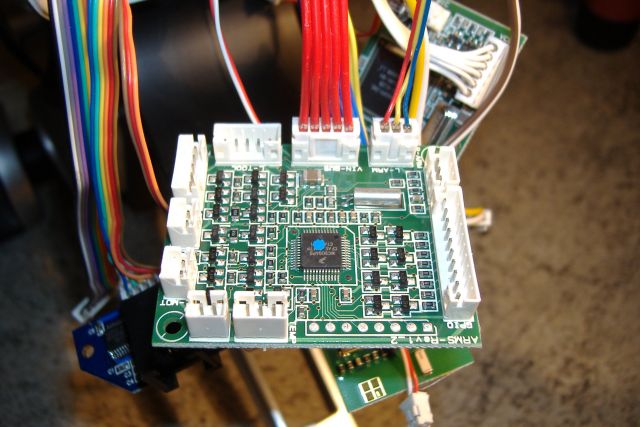 Collegamento del cavo del VIN-BUS e dell'encoder braccio SX |
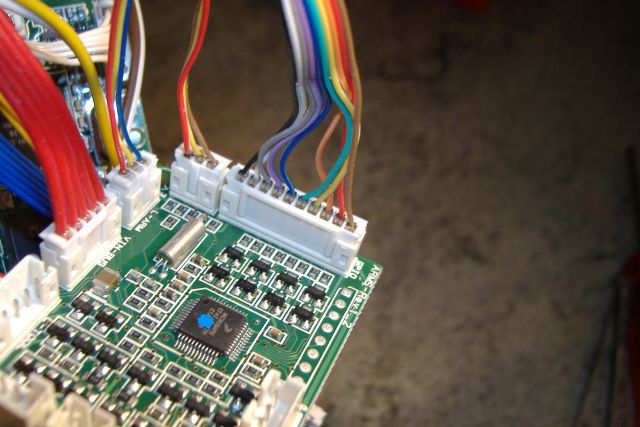 Collegamento della piattina multicolore proveniente dal marsupio |
 Collegamento cavi motoriduttori braccio DX e SX e delle luci di posizione. |
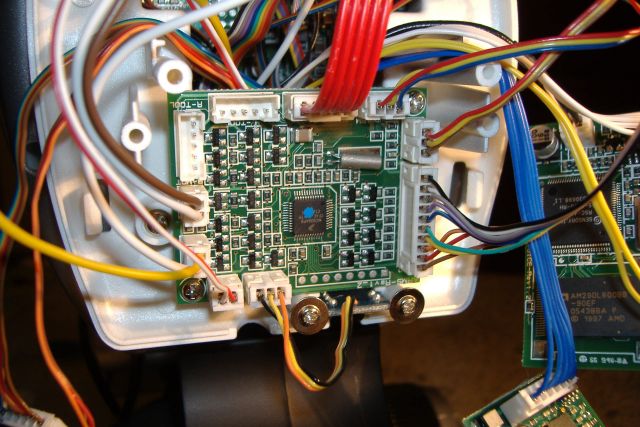 Fissaggio del modulo ARMS al robot |
 Sistemazione del modulo BT e del Modulo Voice |
|
| Elenco revisioni | |
| 02/02/2007 | Inserito fasi di montaggio del modulo arms. |
| 26/01/2007 | Emissione preliminare |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}