![]()

ultimo aggiornamento
29/06/2006
|
|
|
|
|
|
|
Per la movimentazione delle due ruote di cui
è dotato I-Droid vengono realizzati due riduttori il materiale per la
realizzazione del primo è allegato ai fascicoli
35,36,37,38,39. |

|
|
 |
 |
|
| Pignone per cinghiolo
calettato su albero motore elettrico |
1) Puleggia cinghiolo
+ ingranaggio Z=12 |
||
 |
 |
||
|
|
|
2) Ingranaggio fissato
su corpo riduttore Z=30 |
3) Doppio ingranaggio Z1=8+ Z2=24 |
 |
 |
||
| 4)
Doppio ingranaggio Z1=8+ Z2=16 |
5) Albero motore Z=30 |
||
|
|
|
 |
 |
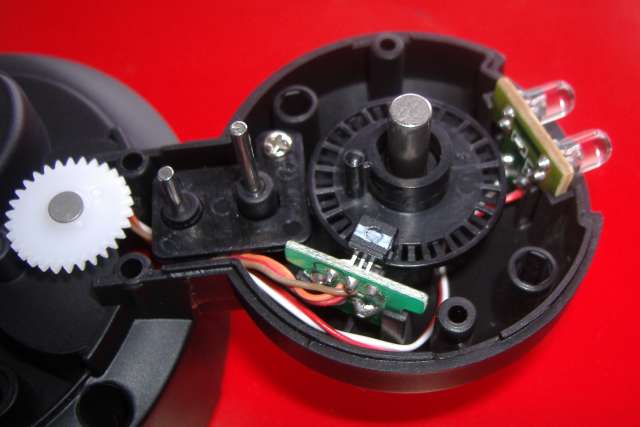
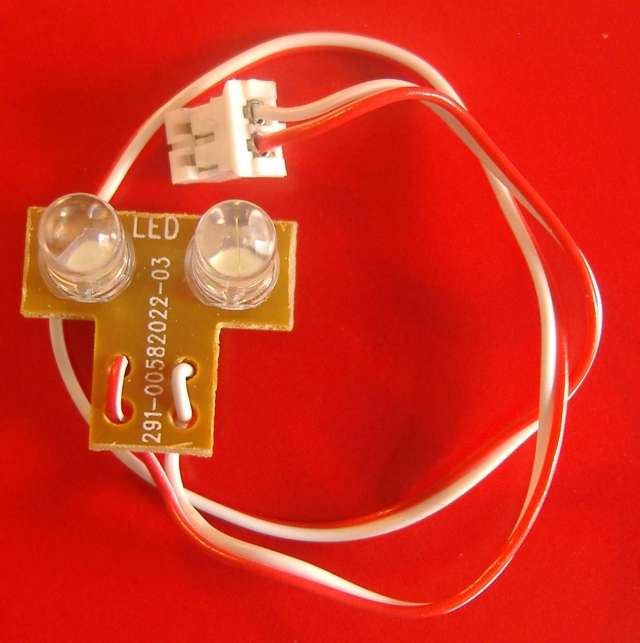
| Luci di posizione | Encoder | disco per encoder |
 |
 |
 |
| Si continua il
montaggio con l'assemblaggio del treno di ingranaggi |
Fissaggio del coprimozzo | Copertura della zona
cinghiolo dopo il fissaggio del motore |
|
Montaggio del motore DC |

|
Foto del motore elettrico a corrente continua per fornire il moto al riduttore. |
 |
Vista posteriore della basetta fissata al motore elettrico su di essa sono saldati tre condensatori ceramici essi servono ad assorbire la corrente che si sviluppa quando si toglie la tensione ai contatti del motorino. Senza di questi, che agiscono come "serbatoi" di carica elettrica, la corrente si scaricherebbe sull'elettronica che controlla i motori, danneggiandola, oppure produrrebbe una piccola scintilla fra i contatti se questi restano scollegati da qualsiasi altro conduttore elettrico. Il fenomeno è dovuto all'accumulo di energia negli avvolgimenti del motore elettrico, che sono a tutti gli effetti delle induttanze |
|
||||
|---|---|---|---|---|
|
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Elenco revisioni | |
| 29/06/2006 | Emissione preliminare |